
")
")



 Математика
МатематикаПохожие презентации:










Коррекция нелинейных систем
1. Коррекция нелинейных систем
При коррекции обычно решаются двеосновные задачи:
• обеспечение устойчивости системы;
• получение автоколебаний (АК) с
заданной амплитудой Аа и частотой Ω.
Коррекция осуществляется с помощью
• линейных или нелинейных
корректирующих устройств (КУ),
• путем компенсации влияния
нелинейностей.
2. Корректирующие устройства (КУ)
В качестве линейных КУиспользуются:
• неединичные главные
обратные связи (рис. а)
• местные обратные
связи, охватывающие
нелинейные элементы
(рис. б).
3.
При расчете линейного КУструктурную схему нелинейной
АСУ приводят к эквивалентной
одноконтурной схеме с НЭ и
эквивалентной линейной частью,
с передаточной функцией:
для схемы на рис.а:
W°л(s) = Wлч(s)*Wос(s);
для схемы на рис. б:
W°л(s) = Wлч(s) + Wмос(s).
4. Компенсация влияния нелинейности (нелинейные КУ)
Позволяет рассматривать нелинейнуюАСУ как линейную относительно
определенных входных воздействий.
В этом случае линеаризация заключается
во включении последовательно или
параллельно заданной нелинейности
F(σ) компенсирующего НЭ с обратной
нелинейной характеристикой 1/F(σ). При
этом получаем эквивалентный линейный
элемент.
5. Пример включения компенсирующей нелинейности
Линеаризация усилителя с зонойнечувствительности путем включения
параллельно с ним усилителя с
насыщением.
Хвых
НЭ в исходной АСУ
Хвх
НЭ после компенсации
Компенсирующий НЭ
6.
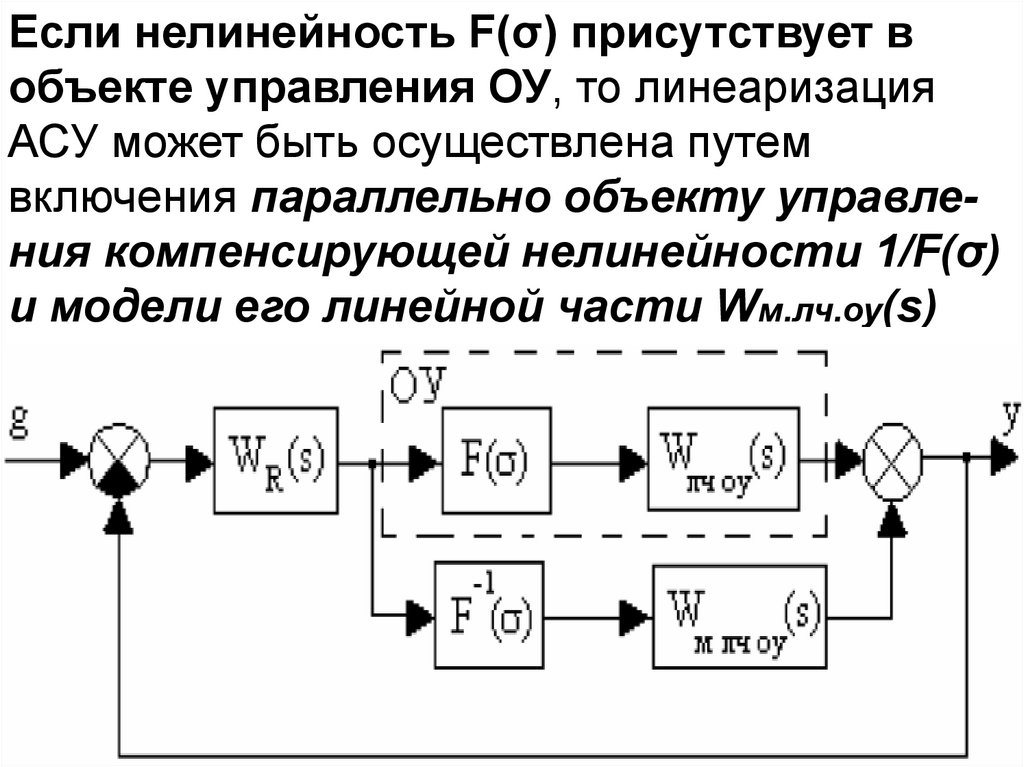
Если нелинейность F(σ) присутствует вобъекте управления ОУ, то линеаризация
АСУ может быть осуществлена путем
включения параллельно объекту управления компенсирующей нелинейности 1/F(σ)
и модели его линейной части Wм.лч.оу(s)
7. Вибрационная компенсация нелинейностей
НЭ проявляет себя как линейный, если на его вход вместе сполезным медленно изменяющимся сигналом g(t) подается
высокочастотная периодическая составляющая u(t), такой
частоты ω, что практически сигнал g(t)=const в пределах
периода T = 2π/ω:
x(t) = g(t) + u(t),
Выходной сигнал также представим в виде суммы средней,
медленно изменяющейся составляющей - F1(g) и колебательной функции - F2(u), близкой к
гармонической с частотой ω
Ун = F(x) = F[g(t) + u(t)] =
= F1(g) + F2(u).
8.
yc
x
-c
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
F1(g) c
0.9
A
g
1
-A
t
U(t)=A sin ω t,
g=const
x
20
15
5
10
g1 g2 g3=A
0
-5
-10
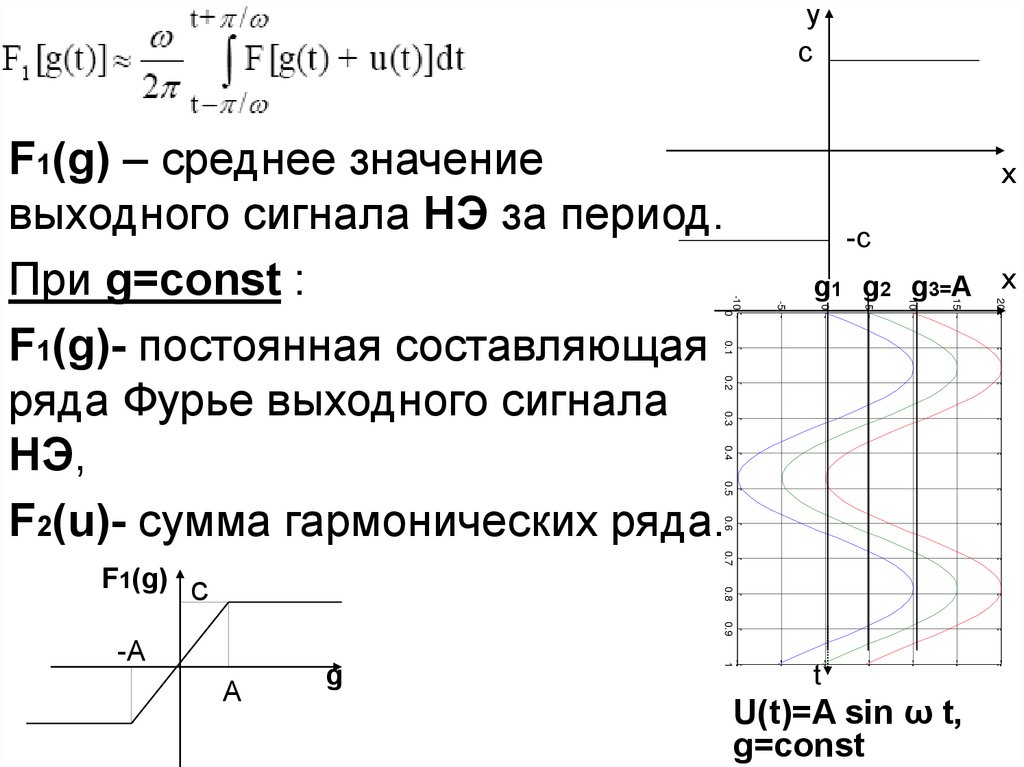
F1(g) – среднее значение
выходного сигнала НЭ за период.
При g=const :
F1(g)- постоянная составляющая
ряда Фурье выходного сигнала
НЭ,
F2(u)- сумма гармонических ряда.
9.
В пределах ±A статическая характеристика F1(g)линейна с коэффициентом передачи kу=c/A.
Чем больше A компенсирующих колебаний u(t), тем
шире зона линейности НЭ, но kу уменьшается.
Выходной сигнал НЭ- ун поступает на вход линейной
части. При большой частоте ω сигнала u(t) линейная
часть (фильтр) их не пропускает, поэтому составляющей F2(u) можно пренебречь и тогда для разомкнутой АСУ:
Wр(s) = y(s)/ g (s) = kу Wлч(s).
При задающем воздействии
g(t) < A
на частоте, превышающей частоту среза
линейной части
ω> ωср, нелинейная АСУ
ведет себя как линейная.
Для формирования высокочастотного сигнала u(t)
используется специальный генератор или
собственные колебания АСУ(скользящий режим).
10. Скользящий режим
это режим работырелейной системы,
характеризуется колебательным
движением изображающей точки вдоль линии
переключения. Чем сильнее воздействие
производной в цепи обратной связи, тем больше поворачиваются линии переключения реле
против часовой стрелки. Интенсивность затухания переходного процесса возрастает.
Скользящий режим возникает, если в
точке переключения угол наклона линии
переключения равен или меньше угла
наклона касательной к фазовой траектории, по которой движется изображающая точка после переключения реле.
11.
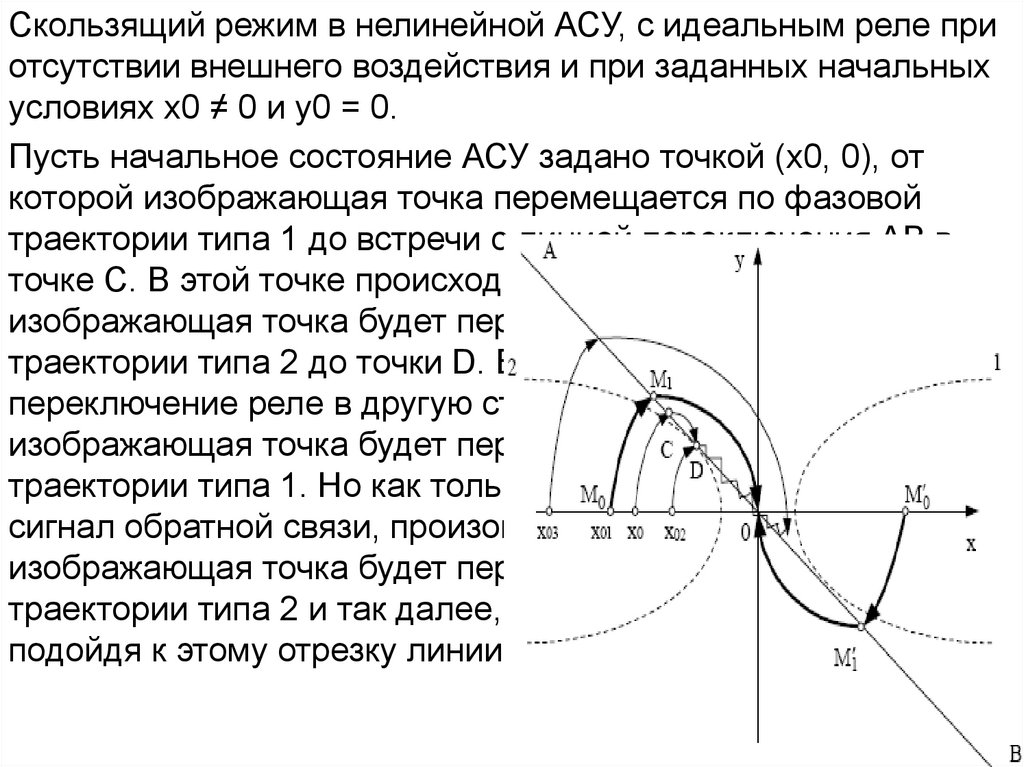
Скользящий режим в нелинейной АСУ, с идеальным реле приотсутствии внешнего воздействия и при заданных начальных
условиях x0 ≠ 0 и y0 = 0.
Пусть начальное состояние АСУ задано точкой (x0, 0), от
которой изображающая точка перемещается по фазовой
траектории типа 1 до встречи с линией переключения AB в
точке C. В этой точке происходит переключение реле и
изображающая точка будет перемещаться по фазовой
траектории типа 2 до точки D. В точке D происходит
переключение реле в другую сторону, после чего
изображающая точка будет перемещаться по фазовой
траектории типа 1. Но как только увеличится результирующий
сигнал обратной связи, произойдет переключение реле и
изображающая точка будет перемещаться по фазовой
траектории типа 2 и так далее, т.е. изображающая точка,
подойдя к этому отрезку линии переключения -отрезку
12.
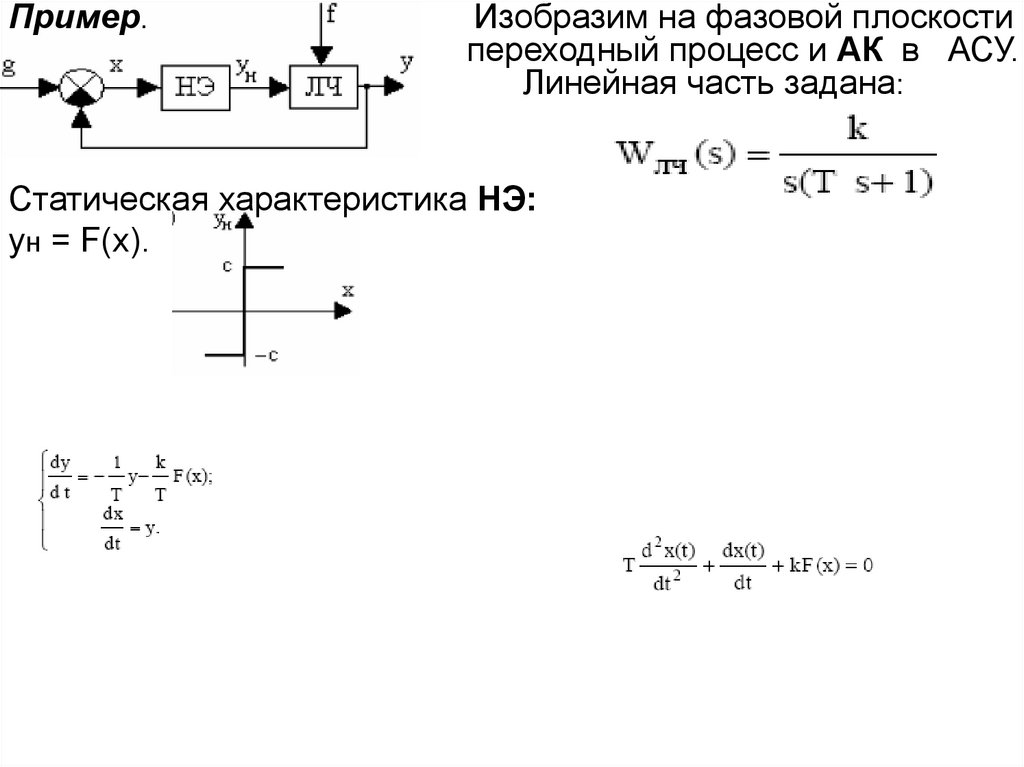
Пример.Изобразим на фазовой плоскости
переходный процесс и АК в АСУ.
Линейная часть задана:
Статическая характеристика НЭ:
yн = F(x).