423.00K
Категория:
Физика
Похожие презентации:
Построение наблюдателя для ситемы 3-го порядка. (Тема 7)
Методы построения математических моделей. Глава 3
Объект. Лекция № 3
Физическое моделирование.Типы экспериментов. Лекция 3
Автоматическое регулирование технологических процессов
Математические модели и методы оптимизации процессов пространственного маневрирования морских подвижных объектов
Автоматизация. Основные понятия и определения
Оптика. Интерференция. Лекция 3
Я - наблюдатель
Два класса объектов регулирования
Пример построения наблюдателя для системы 3-го порядка
1.
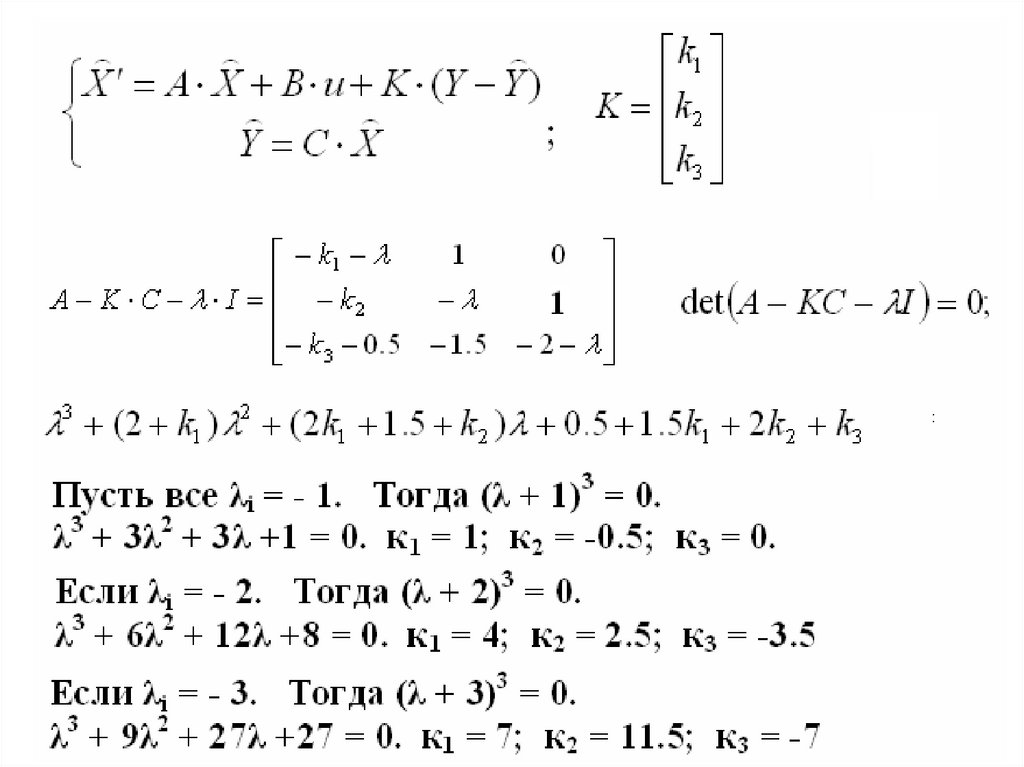
ПРИМЕР ПОСТРОЕНИЯ НАБЛЮДАТЕЛЯ ДЛЯ СИТЕМЫ 3-го ПОРЯДКА
2.
3.
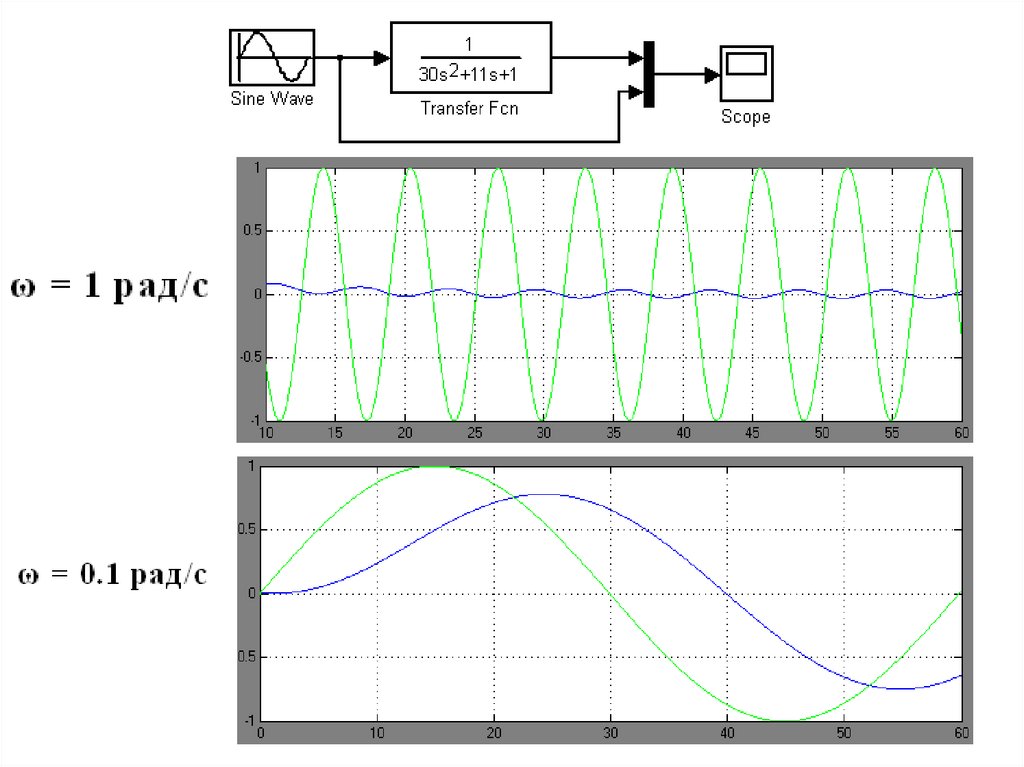
Модель системы с наблюдателем
4.
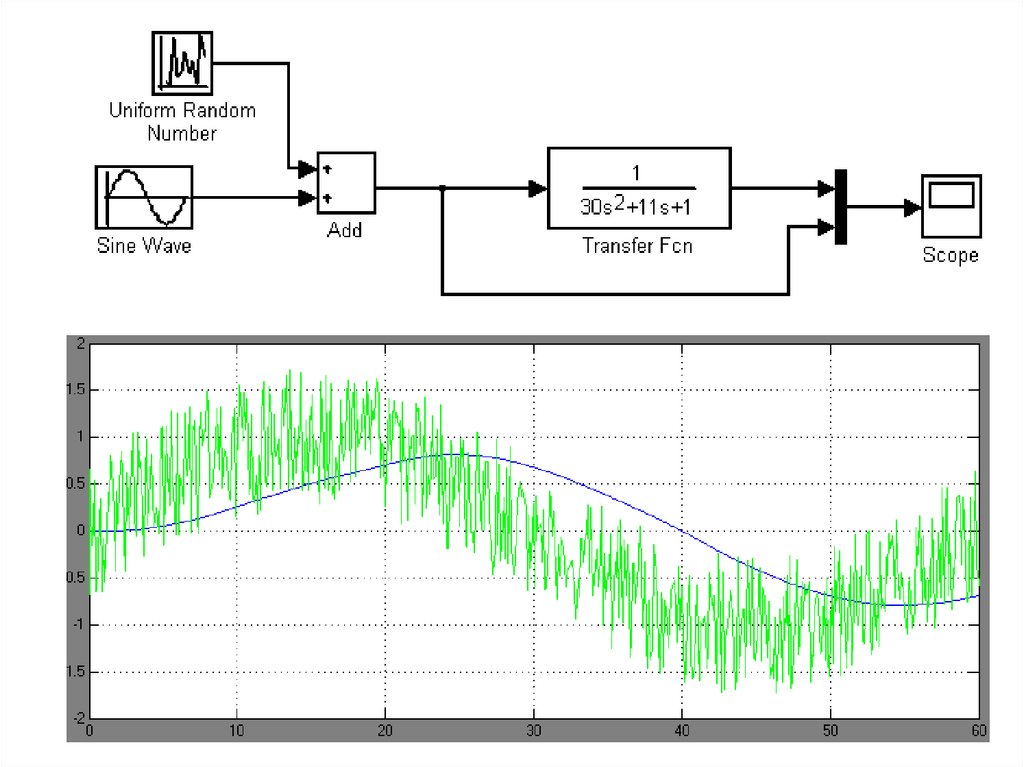
Результат измерения y(t)
5.
Результат наблюдения x1
6.
Результат наблюдения Х2
7.
Результат наблюдения Х3
8.
Альтернативная схема получения Х2 и Х3 (без наблюдателя)
9.
Сравнение двух способов получения координаты Х2
10.
Сравнение двух способов получения координаты Х3
11.
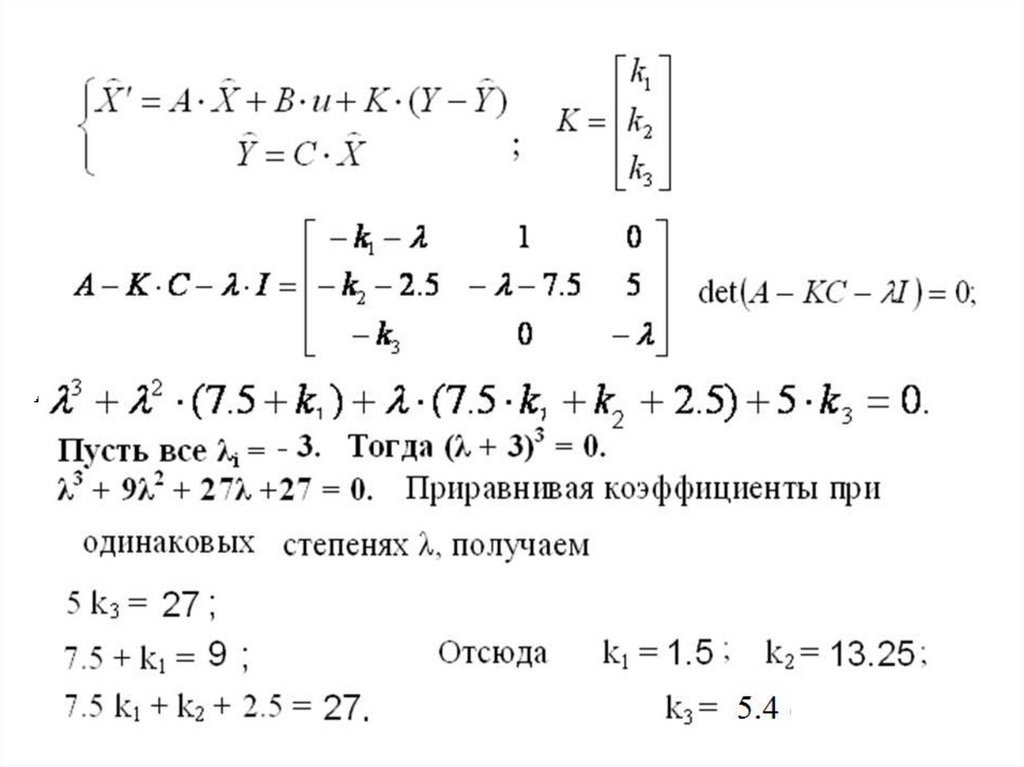
Наблюдение координаты Х2 при λ = - 3
12.
ТИПОВАЯ СТРУКТУРА КОНТУРА РЕГУЛИРОВАНИЯ
13.
14.
15.
Наблюдение координат состояния и медленно изменяющегося f
16.
17.
Схема наблюдения координат состояния и f(t)
18.
Наблюдение координаты Х1
19.
Наблюдение координаты Х2
20.
Наблюдение величины f = X3
21.
МОДЕЛИ РЕЛЕЙНЫХ УСТРОЙСТВ В SIMULINK MATLAB
1. Двухпозиционное реле
22.
Модель трехпозиционного реле
23.
РЕГУЛИРОВАНИЕ РАСХОДА ПРИ ПОМОЩИ МЭО И ЗАДВИЖКИ
24.
МОДЕЛЬ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ВОДЫ В КОТЛЕ
English
Русский
Правила


")



")





")







 Физика
Физика")








