



 Физика
Физика Механика
МеханикаПохожие презентации:





")

")
")
")
Определение перемещений. Лекция 6
1. Лекция 6 ОПРЕДЕЛЕНИЕ ПЕРЕМЕЩЕНИЙ
2.
1. Понятие о перемещенияхПри воздействии нагрузки, температуры и других факторов
сооружения меняют свою форму, а его точки получают перемещения:
Перемещение –
векторная величина:
Перемещение любой точки А на плоскости можно задать через его
модуль A и направление A, которые определяются по формулам:
A = (Δ xA ) (Δ y A ) ,
2
2
Δx A
A = arc tg Δy
,
A
где xA и yA − горизонтальная и вертикальная составляющие A.
3. 2. Действительные работы внешних и внутренних сил. Потенциальная энергия
Методы определения перемещений основаны на вычислении работвнешних и внутренних сил.
2. Действительные работы внешних
и внутренних сил. Потенциальная энергия
Действительным перемещением называется перемещение,
вызванное силой по направлению ее действия.
В упругих системах перемещение
прямо пропорционально действующей
силе, и в них выполняется закон Гука
= P.
где − податливость.
Эту зависимость представим в виде:
Диаграмма −P
4.
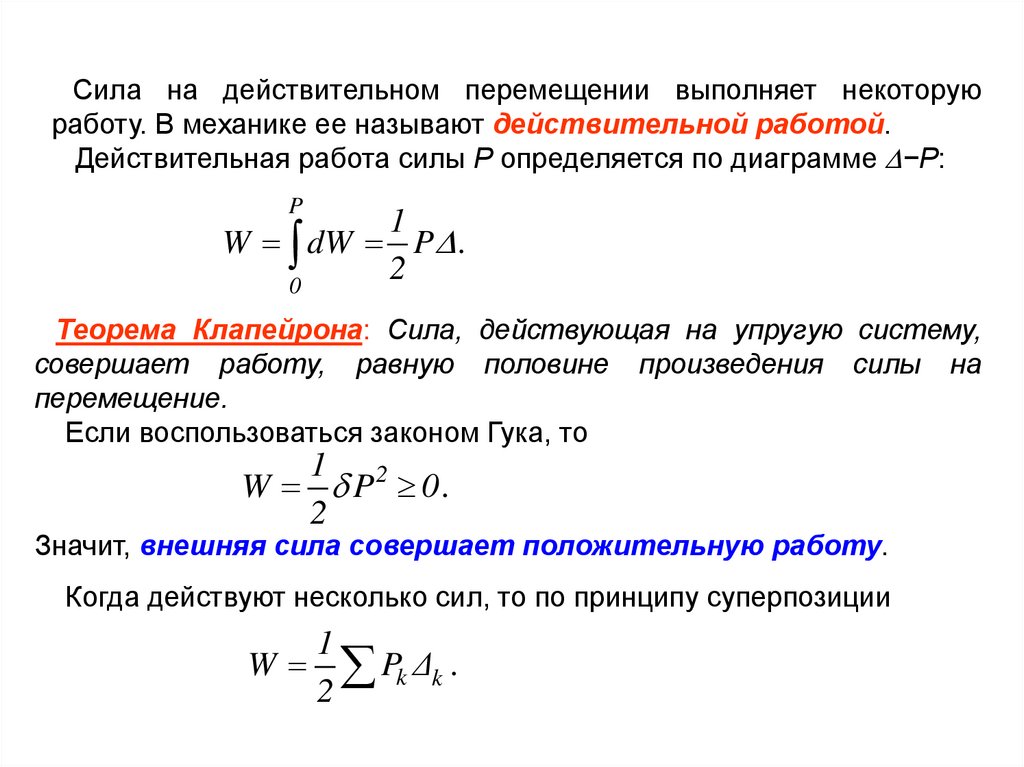
Сила на действительном перемещении выполняет некоторуюработу. В механике ее называют действительной работой.
Действительная работа силы P определяется по диаграмме −P:
P
1
W dW P .
2
0
Теорема Клапейрона: Сила, действующая на упругую систему,
совершает работу, равную половине произведения силы на
перемещение.
Если воспользоваться законом Гука, то
1 2
W P 0.
2
Значит, внешняя сила совершает положительную работу.
Когда действуют несколько сил, то по принципу суперпозиции
1
W Pk Δk .
2
5.
В идеально-упругой системе работа внешних сил W полностьюпереходит в потенциальную энергию деформации U:
W =U.
Если убрать внешние силы, упругая система возвратится в
исходное положение. Эту работу совершают внутренние силы.
Так как работа внешних сил W положительна, то работа
внутренних сил V будет отрицательной:
W=–V.
Определим работу внутренних сил M, Q, N плоской стержневой
системы.
6.
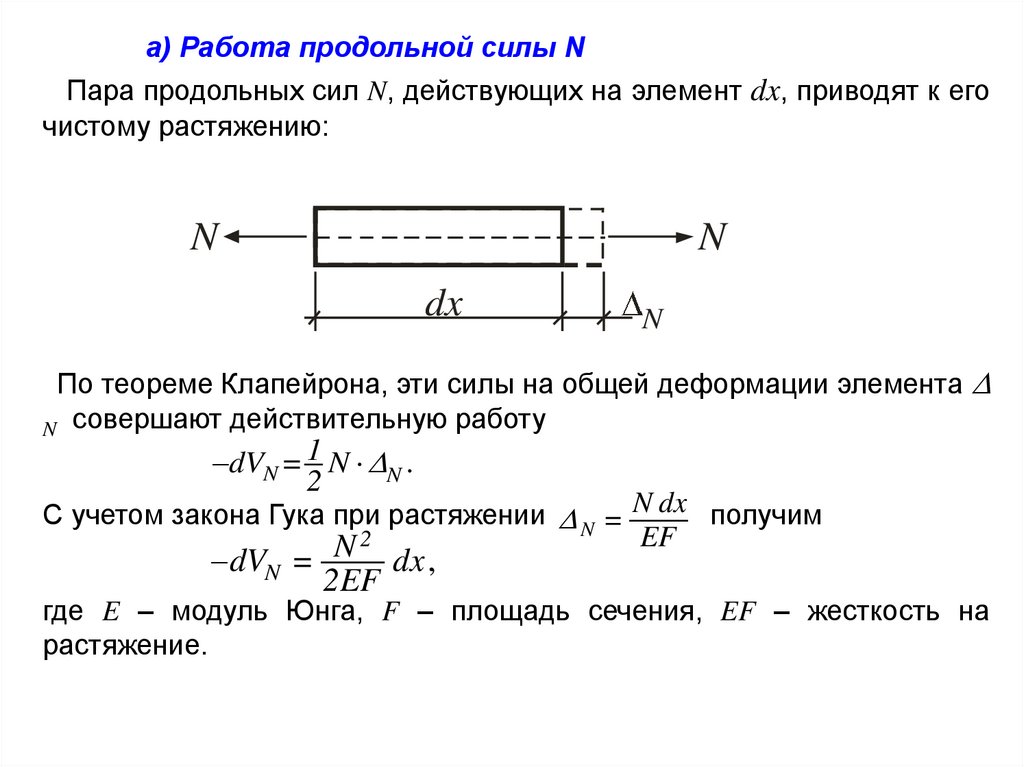
а) Работа продольной силы NПара продольных сил N, действующих на элемент dx, приводят к его
чистому растяжению:
N
N
dx
N
По теореме Клапейрона, эти силы на общей деформации элемента
N совершают действительную работу
dVN = 1 N N .
2
С учетом закона Гука при растяжении N = N dx получим
EF
N2
dVN =
2EF
dx ,
где E – модуль Юнга, F – площадь сечения, EF – жесткость на
растяжение.
7.
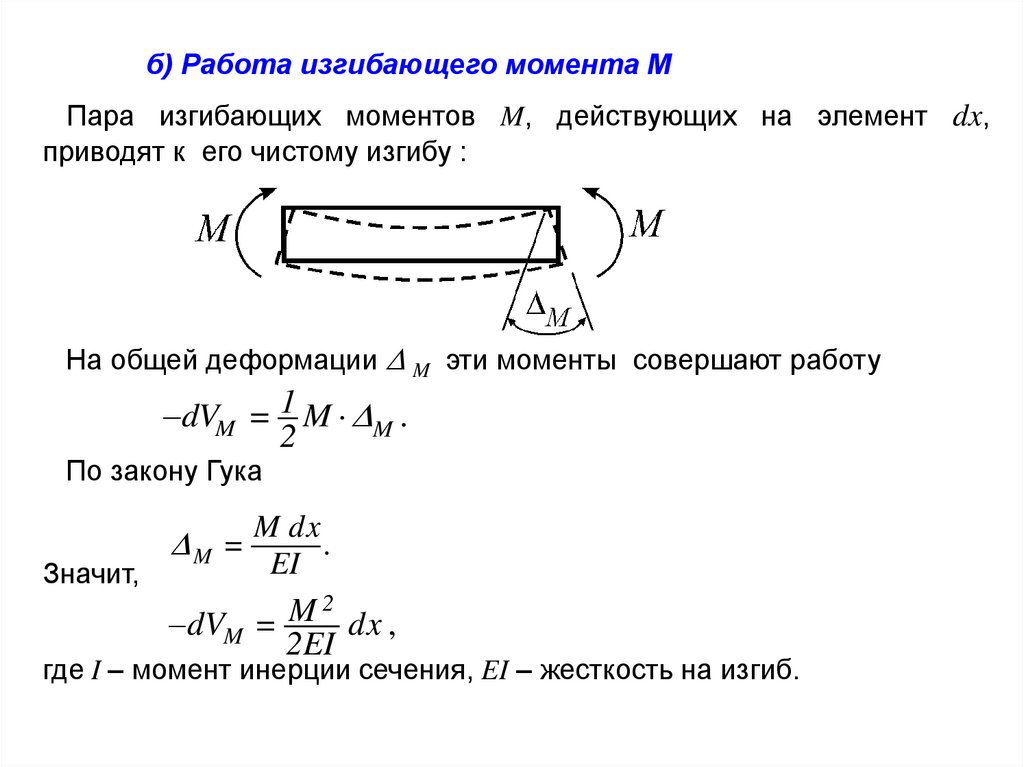
б) Работа изгибающего момента MПара изгибающих моментов M, действующих на элемент dx,
приводят к его чистому изгибу :
На общей деформации M эти моменты совершают работу
dVM = 1 M · M .
2
По закону Гука
Значит,
M =
M dx
.
EI
2
M
dVM =
dx ,
2EI
где I – момент инерции сечения, EI – жесткость на изгиб.
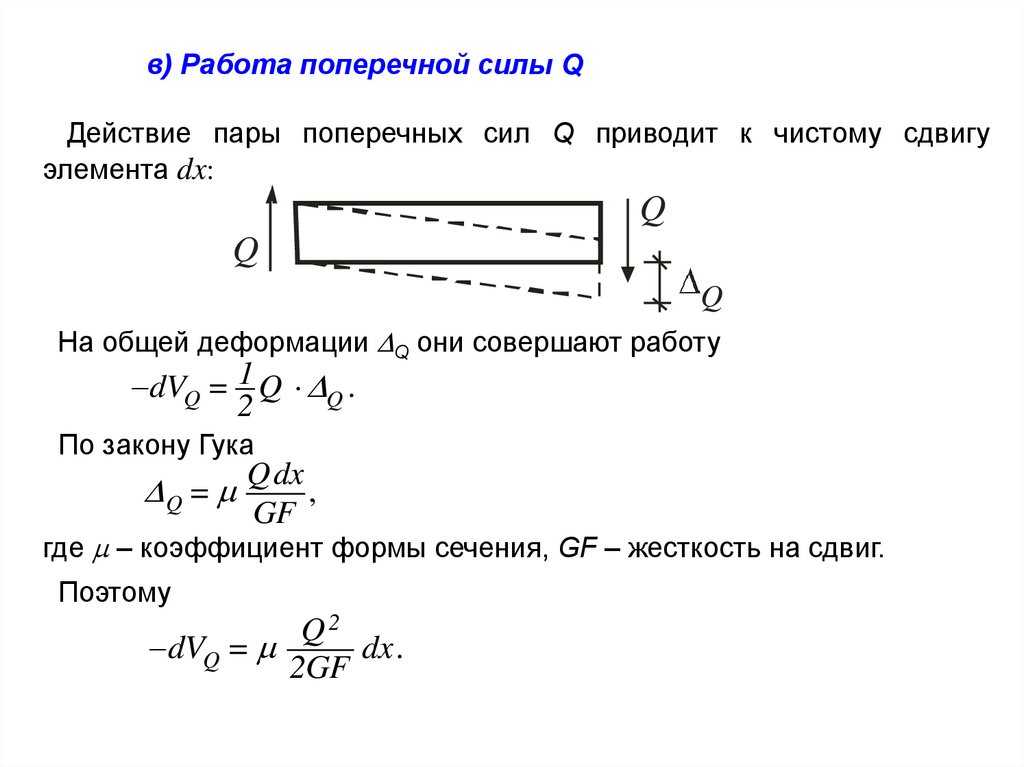
8.
в) Работа поперечной силы QДействие пары поперечных сил Q приводит к чистому сдвигу
элемента dx:
Q
Q
Q
На общей деформации Q они совершают работу
dVQ = 1 Q · Q .
2
По закону Гука
Q =
Qdx
,
GF
где – коэффициент формы сечения, GF – жесткость на сдвиг.
Поэтому
Q2
dVQ =
dx .
2GF
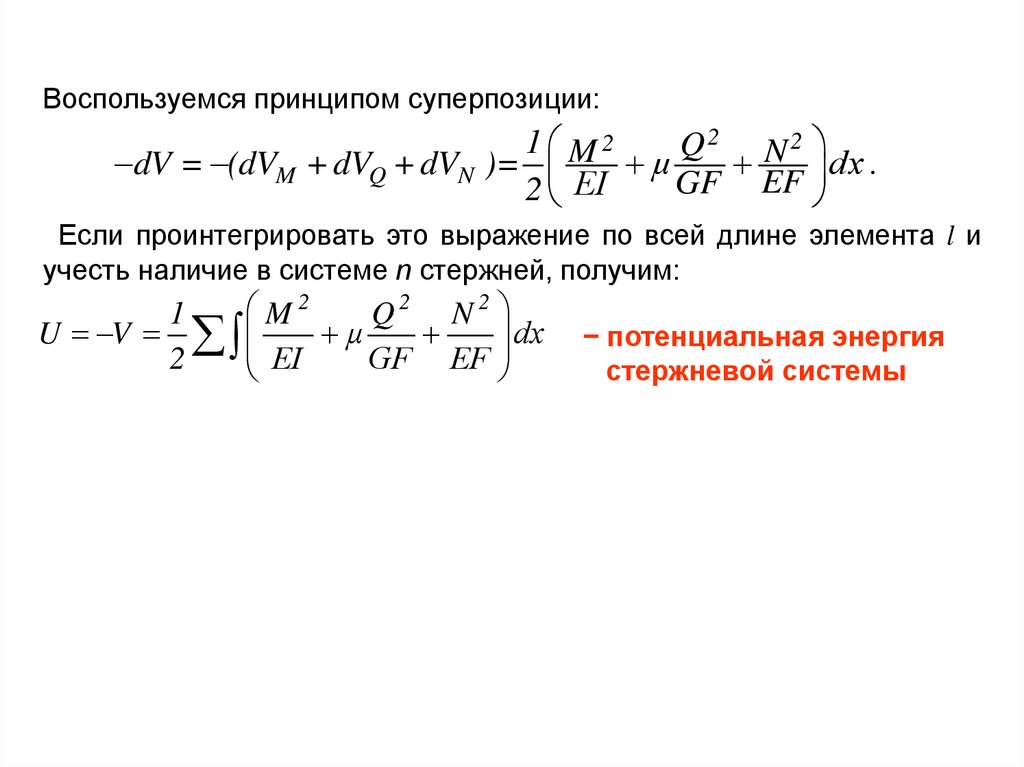
9.
Воспользуемся принципом суперпозиции:1 M2
Q2 N2
dV = (dVM + dVQ + dVN ) =
μ
dx .
GF EF
2 ΕΙ
Если проинтегрировать это выражение по всей длине элемента l и
учесть наличие в системе n стержней, получим:
M2
1
Q2 N 2
U V
μ
dx
2
GF EF
ΕΙ
− потенциальная энергия
стержневой системы
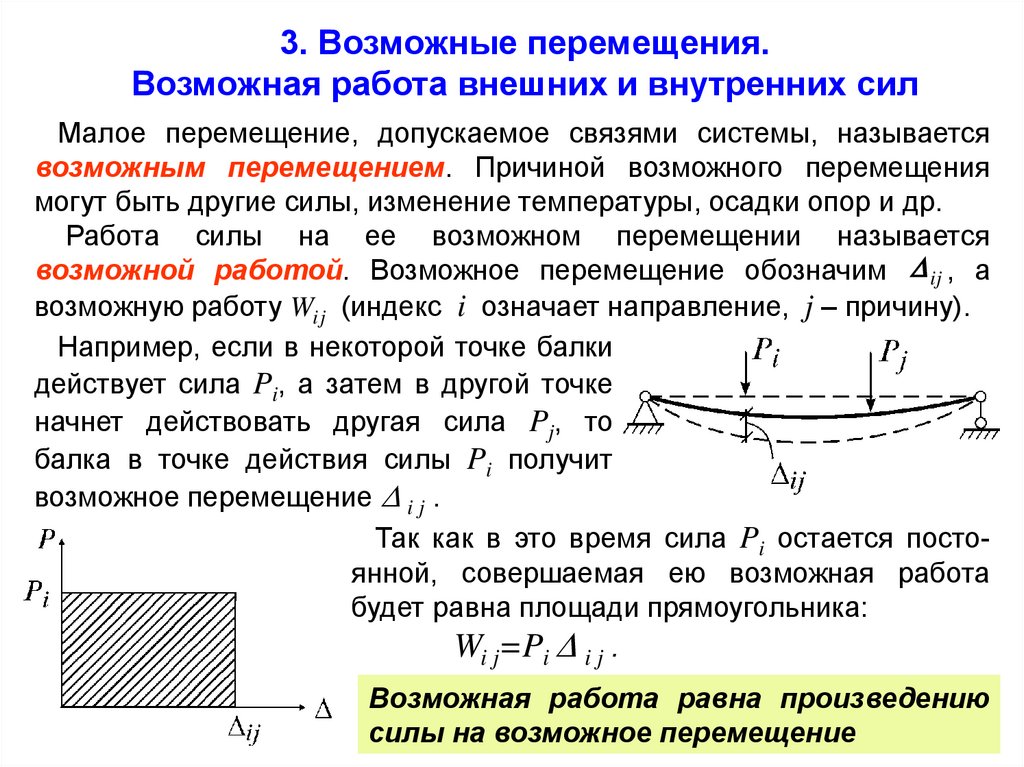
10.
3. Возможные перемещения.Возможная работа внешних и внутренних сил
Малое перемещение, допускаемое связями системы, называется
возможным перемещением. Причиной возможного перемещения
могут быть другие силы, изменение температуры, осадки опор и др.
Работа силы на ее возможном перемещении называется
возможной работой. Возможное перемещение обозначим ij , а
возможную работу Wij (индекс i означает направление, j – причину).
Например, если в некоторой точке балки
действует сила Pi, а затем в другой точке
начнет действовать другая сила Pj, то
балка в точке действия силы Pi получит
возможное перемещение i j .
Так как в это время сила Pi остается постоянной, совершаемая ею возможная работа
будет равна площади прямоугольника:
Wi j=Pi i j .
Возможная работа равна произведению
силы на возможное перемещение
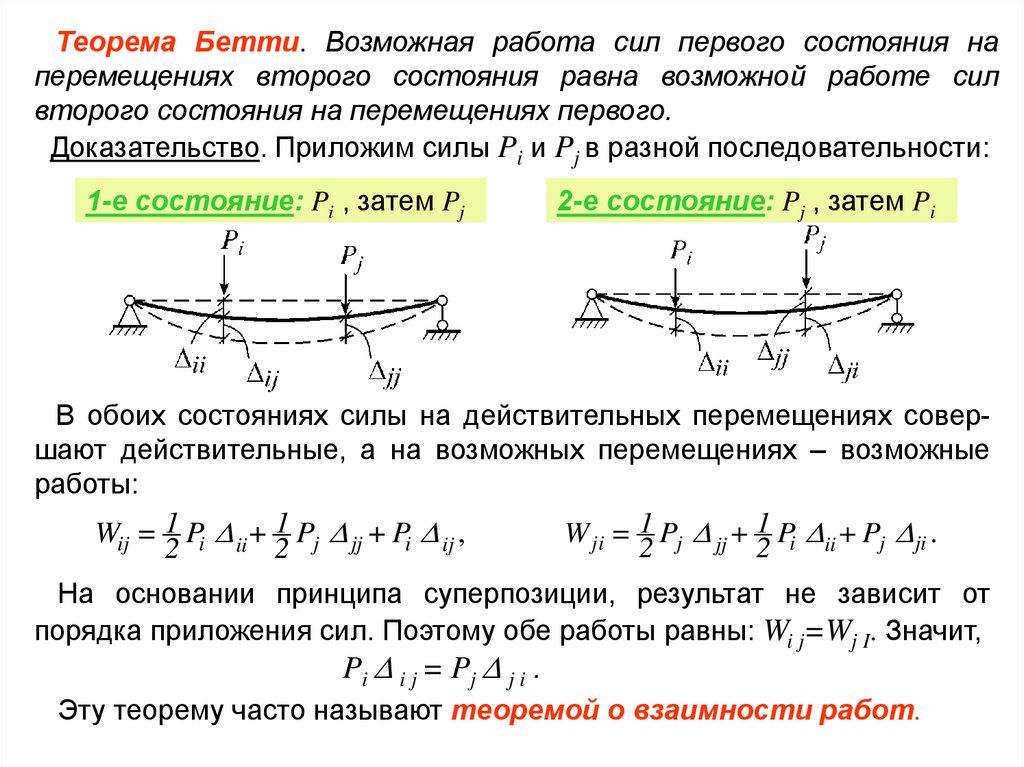
11.
Теорема Бетти. Возможная работа сил первого состояния наперемещениях второго состояния равна возможной работе сил
второго состояния на перемещениях первого.
Доказательство. Приложим силы Pi и Pj в разной последовательности:
1-е состояние: Pi , затем Pj
2-е состояние: Pj , затем Pi
В обоих состояниях силы на действительных перемещениях совершают действительные, а на возможных перемещениях – возможные
работы:
W ji = 1 Pj jj + 1 Pi ii + Pj ji .
Wij = 1 Pi ii+ 1 Pj jj + Pi ij ,
2
2
2
2
На основании принципа суперпозиции, результат не зависит от
порядка приложения сил. Поэтому обе работы равны: Wi j=Wj I. Значит,
Pi i j = Pj j i .
Эту теорему часто называют теоремой о взаимности работ.
12.
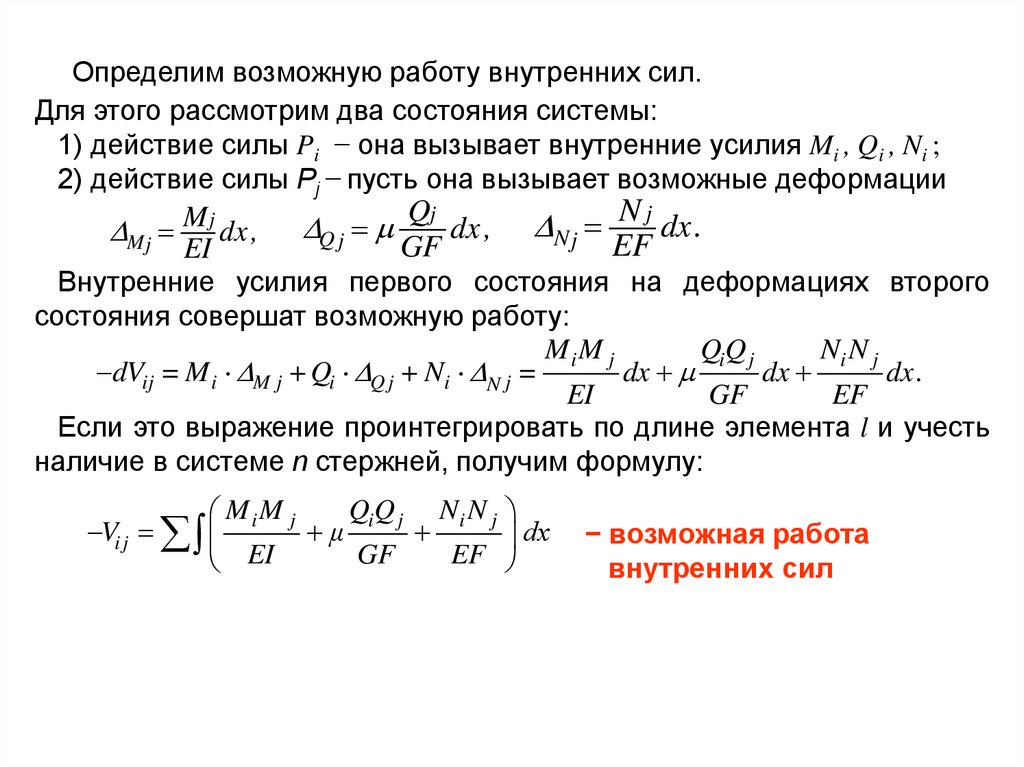
Определим возможную работу внутренних сил.Для этого рассмотрим два состояния системы:
1) действие силы Pi − она вызывает внутренние усилия Mi , Qi , Ni ;
2) действие силы Pj − пусть она вызывает возможные деформации
Qj
N j dx.
M
j
dx
,
M j dx ,
Nj
Qj
EF
GF
EI
Внутренние усилия первого состояния на деформациях второго
состояния совершат возможную работу:
MiM j
QiQ j
Ni N j
dVij = M i M j +Qi Q j + Ni N j =
dx
dx
dx .
EI
GF
EF
Если это выражение проинтегрировать по длине элемента l и учесть
наличие в системе n стержней, получим формулу:
QiQ j Ni N j
MiM j
Vi j
μ
dx
EI
GF
EF
− возможная работа
внутренних сил
13. 4. Интеграл Мора. Определение перемещений
Рассмотрим два состояния стержневой системы:грузовое состояние (ГС)
единичное состояние (ЕС)
Внутренние силы грузового состояния MP, QP, NP на деформациях
Q
Μ
N
dx ,
dx
,
dx совершат возможную работу
единичного состояния
GF
EI
EF
MPM
QP Q N P N
VP1
+
+
dx .
EI
EF
GF
А сила P=1 единичного состояния на перемещении грузового
состояния P совершит возможную работу
W1P=1 P= P .
По принципу возможных перемещений, в упругих системах обе
работы должны быть равны: W1P = –VP1. Отсюда получаем формулу:
M M
QP Q NP N
P
− формула Мора
P
+
+
dx
EI
EF
GF
Она используется для определения перемещений стержневой системы.
14.
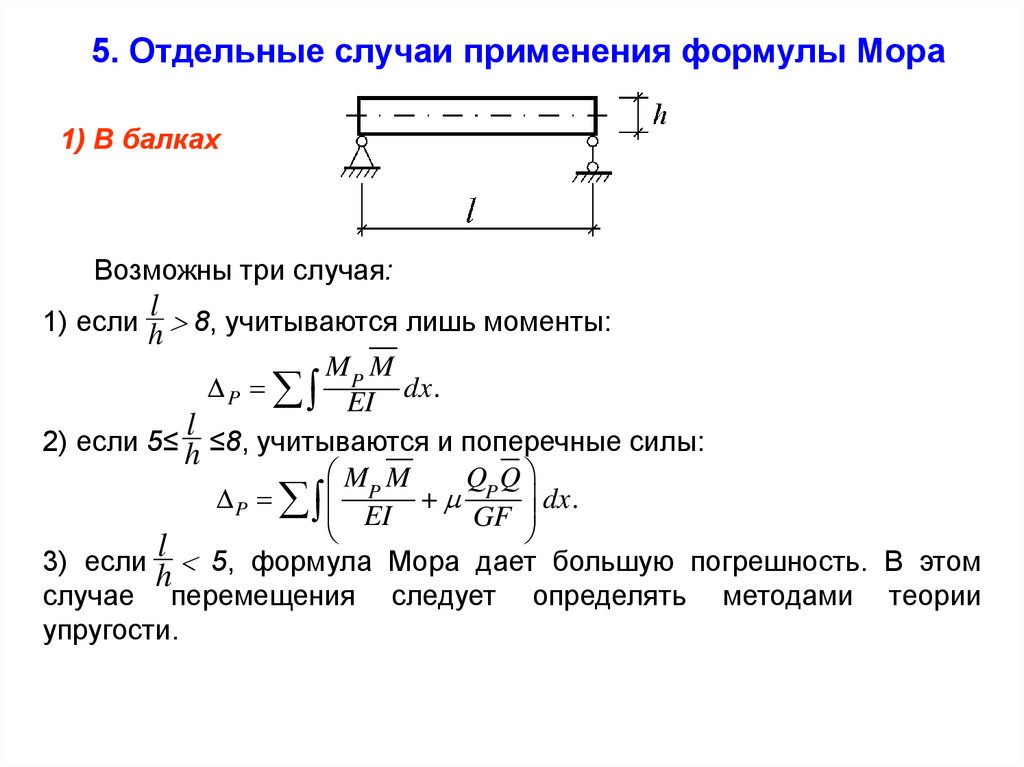
5. Отдельные случаи применения формулы Мора1) В балках
Возможны три случая:
l
1) если h 8, учитываются лишь моменты:
M M
P P dx .
EI
l
2) если 5≤ h ≤8, учитываются и поперечные силы:
M M
QP Q
P
P
+
dx .
EI
GF
l
3) если 5, формула Мора дает большую погрешность. В этом
h
случае перемещения следует определять методами теории
упругости.
15.
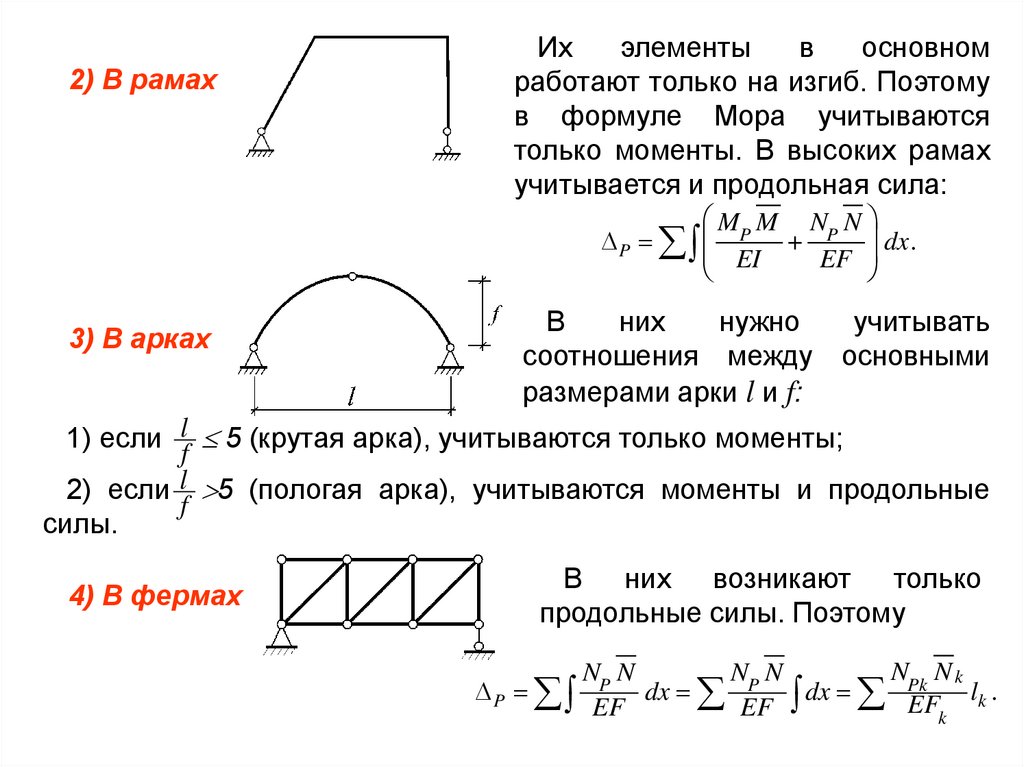
2) В рамахИх
элементы
в
основном
работают только на изгиб. Поэтому
в формуле Мора учитываются
только моменты. В высоких рамах
учитывается и продольная сила:
M M N N
P P + P dx .
EI
EF
3) В арках
В
них
нужно
учитывать
соотношения между основными
размерами арки l и f:
1) если l 5 (крутая арка), учитываются только моменты;
f
2) если l 5 (пологая арка), учитываются моменты и продольные
f
силы.
4) В фермах
В них возникают только
продольные силы. Поэтому
P
N Nk
NP N
N N
dx P dx Pk
l .
EFk k
EF
EF