






 Возьмём ось X. Из точки О отложим вектор a под углом α к оси. Если")
 и её скорость")





, x2 = a2 cos(ω0t + φ2). В соответствии с теоремой")





, x2 = a cos((ω + Δω)t), Результирующее колебание x=x1+x2=2acos(Δωt/2)cos((ω+Δω/2)t)≈ ≈ 2a")
, y = b cos(ωt + α).")

 α = 0:")
 α = ±π:")
 α = ±π/2: Если a = b, то получаем окружность: х2 + у2 = R2.")










, Формула Эйлера: – комплексная форма,")


.")






:")



 x/ - расстояние, пройденное точкой по")






")
 выполняется закон сохранения механической энергии – полная механическая")




 колебания описываются дифференциальным уравнением β – коэффициент затухания, r –")
, в этом случае решение уравнения имеет вид здесь – частота затухающих колебаний,")


 и (t + T): d – логарифмический декремент затухания. Он показывает,")
 после которых амплитуда уменьшается в «е» раз, тогда: Если d = 0,01, то за N = 100")
 к потерям энергии (ΔE) за этот же период со")








): Амплитуда и фаза колебаний определяются выражениями")


 провести горизонтальную линию по уровню то можно")









 ≈ mgℓα – момент")
 – момент упругой силы относительно той же оси. Аналогично, для второго маятника")



 α1 = α2, Решение:")
 α1 = – α2, Решение:")








 – периодическая функция, Ck – коэффициенты, i – мнимая единица, ωk – частоты,")


 с использованием первых десяти")

 – амплитудная модуляция, ω(t) – частотная модуляция, φ(t) – фазовая модуляция.")


: Здесь имеет место непрерывное множество синусоидальных колебаний, частоты")
 a(ω) t ω")


 – модулирующая функция):")

 сигнал 3) сигнал после детектора (диода) 2) модулирующий 4) детектированный сигнал сигнал на выходе")

")











, то состояние равновесия будет неустойчивым фокусом. Любое малое отклонение")




. 32.")


 оператор Лапласа")
 S(z, t) = a cos(ωt – kz)z. ω – циклическая частота волны, k =")
 плоскости z = const. Поверхности, где колебания")




 = acos(ωt – kz), S2(z, t) = acos(ωt + kz), одна волна падающая (вектор –")
 cos(ωt). Временные и")













, в области 1 z < 0. На")
, отражённая волна S′1 = a′1 cos(ωt + k1z), k1 ≠ k2, ʋ1 ≠ ʋ2.")
 = E2k2a2. Это условие получено из условия равенства сил, действующих на границе со")

 I0 ≈ 10–12 Вт/м2, Болевой порог I ≈ 1012 I0. Интенсивность звука")


, u1")


 Физика
ФизикаПохожие презентации:
")





")



Колебания. Лекция № 8
1. ЛЕКЦИЯ № 8 Колебания.
2001
2. ВОПРОСЫ 23. Гармонические колебания. Характеристики гармонических колебаний. Векторная диаграмма. 24. Сложение колебаний одного
направления и частоты. Биения.Сложение взаимно
перпендикулярных колебаний.
25. Уравнение динамики
незатухающих колебаний.
Пружинный маятник.
200
2
3. 23. Гармонические колебания. Характеристики гармонических колебаний. Графическое представление гармонических колебаний.
Векторная диаграмма.Фазовая плоскость.
200
3
4. Колебания – процессы отличающиеся той или иной степенью повторяемости.
2004
5. Дифференциальное уравнение гармонических колебаний: Закон кинематики гармонических колебаний – колебаний, которые совершаются
Дифференциальное уравнениегармонических колебаний:
x
2
ω0 x
0
Закон кинематики гармонических
колебаний – колебаний, которые
совершаются по закону синуса или
косинуса (решение
дифференциального уравнения):
x A cos ω0t α
200
5
6. x – смещение или колеблющаяся величина, A – амплитуда колебаний – максимальное смещение или максимальное значение колеблющейся
величины,(ω0t + α) – величина, стоящая под
знаком косинуса или синуса – фаза
колебаний,
200
6
7. ω0 – собственная частота, она же циклическая частота – количество колебаний за 2π секунды, α – начальная фаза (для момента
времени t = 0),T – период, время, за которое фаза
получает приращение 2π или время
одного колебания (цикла),
200
7
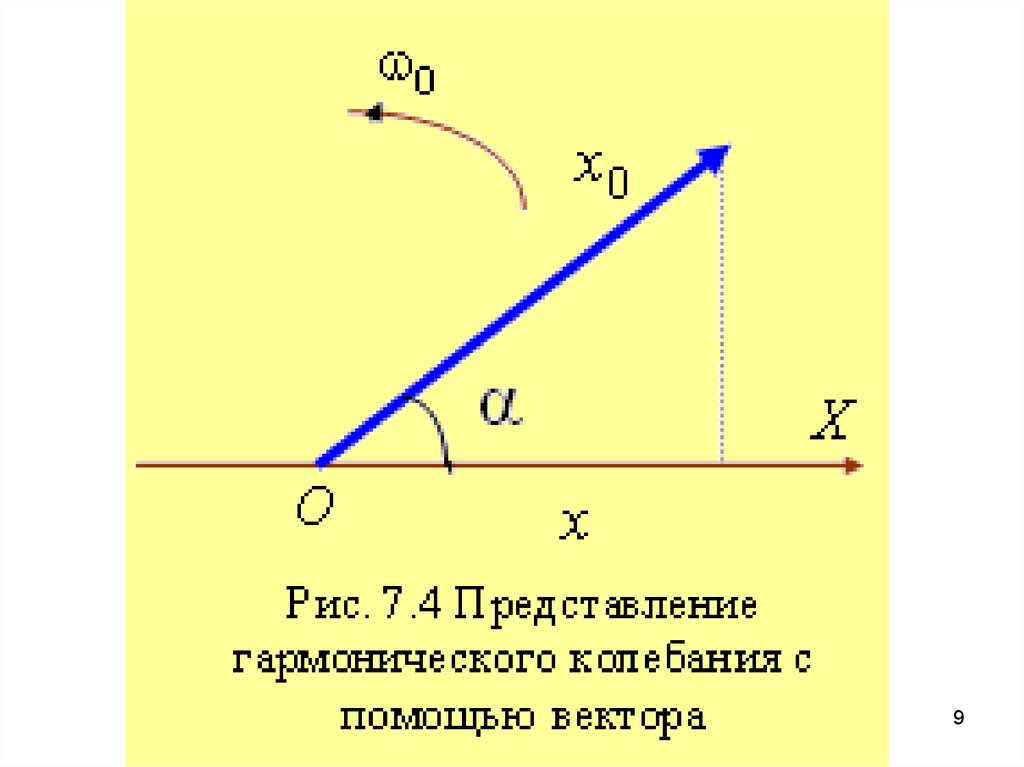
8. Векторная диаграмма (векторное изображение колебаний) Возьмём ось X. Из точки О отложим вектор a под углом α к оси. Если
привести этот вектор во вращение сугловой скоростью ω0, то проекция
конца вектора будет перемещаться
по оси X в пределах от –a до +a, по
закону x = a cos(ω0t + α).
200
8
9.
2009
10. Фазовая плоскость На фазовой плоскости для координат используют значения колеблющейся величины (ось абсцисс – X) и её скорость
(осьординат – Y).
x a cos ωt ,
v
x
aω cos ωt α .
200
10
11. Уравнение траектории фазовой кривой X X
Уравнение траектории фазовойкривой
X
2
2
x
x
1
2
2
a
aω
X
200
11
12. Затухающий осциллятор
20012
13. Ангармонические колебания. Осциллятор с большим затуханием. β >> ω0
Ангармонические колебания.Осциллятор с большим затуханием.
β >> ω0
200
13
14. Предельный случай β = ω0 Этот случай в технике важен тем, что при таком соотношении параметров в случае внешнего воздействия
Предельный случай β = ω02π
2
2
ω ω0 β 0, T
.
ω
Этот случай в технике важен тем,
что при таком соотношении
параметров в случае внешнего
воздействия система может
вернуться в исходное состояние.
(Из-за силы трения система может
не вернуться в исходное положение)
200
14
15.
20015
16. 24. Сложение колебаний одного направления и частоты. Биения. Сложение взаимно перпендикулярных колебаний. Частные случаи.
20016
17. Рассмотрим сложение двух гармонических колебаний x1 = a1 cos(ω0t + φ1), x2 = a2 cos(ω0t + φ2). В соответствии с теоремой
косинусов и рисунком запишемамплитуду результирующего
колебания
a2 = a12 + a22 + 2a1a2cos(φ2 – φ1).
200
17
18.
20018
19. Фаза результирующего колебания вычисляется следующим образом
a1 sin 1 a2 sin 2tg
a1 cos 1 a2 cos 2
200
19
20. Если φ2 ≠ φ1 то говорим о векторном сложении векторов, Если φ2 = φ1 то говорим о скалярном сложении векторов: x = x1 + x2 = (a1
+ a2) cos(ω0t + φ).200
20
21.
20021
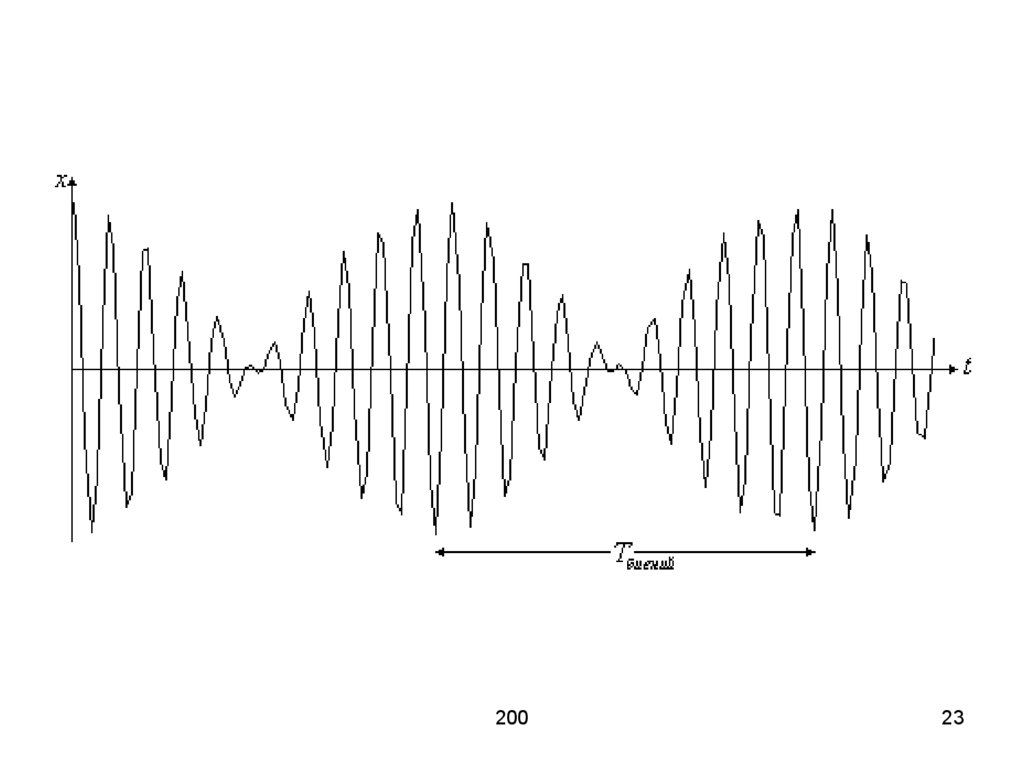
22. Биения – колебания с пульсирующей амплитудой, которые получаются в результате сложения двух колебаний, обладающими
незначительно отличающимисячастотами.
ω1 ω, ω2 ω ω, ω ω.
200
22
23.
20023
24. Складываемые колебания x1 = a cos(ωt), x2 = a cos((ω + Δω)t), Результирующее колебание x=x1+x2=2acos(Δωt/2)cos((ω+Δω/2)t)≈ ≈ 2a
cos(Δωt/2) cos(ωt).Амплитуда результирующего
колебания и период пульсаций
2π
ω
Aрез 2 A cos
t , Tбиения
Δω
2
200
24
25. Сложение взаимно перпендикулярных колебаний Запишем уравнения колебаний в следующей форме: x = a cos(ωt), y = b cos(ωt + α).
Это параметрическая форма записи.200
25
26. Из этой формы можно получить следующую запись Это уравнение эллипса
Из этой формы можно получитьследующую запись
2
2
x
y 2 xy
2
2
cosα sin α
2
a b
ab
Это уравнение эллипса
200
26
27. В зависимости от фазы α получаем тот или иной вид колебаний. Рассмотрим три варианта. 1) α = 0:
2x y
0
a b
b
y x
a
200
27
28. 2) α = ±π:
2x y
0
a b
b
y x
a
200
28
29. 1) α = ±π/2: Если a = b, то получаем окружность: х2 + у2 = R2.
1) α = ±π/2:2
2
x
y
1
2
2
a
b
Если a = b, то получаем окружность:
х2 + у2 = R2.
200
29
30. Если α = + /2, то точка на траектории будет двигаться по часовой стрелке.
Если α = + /2, то точка натраектории будет двигаться по
часовой стрелке.
1
200
30
31. Если α = /2, то точка на траектории будет двигаться против часовой стрелки.
Если α = /2, то точка натраектории будет двигаться против
часовой стрелки.
200
31
32. При сложении взаимно перпендикулярных колебаний с различными амплитудами и частотами x y и неодинаковыми начальными фазами
При сложении взаимноперпендикулярных колебаний с
различными амплитудами и
частотами x y и неодинаковыми
начальными фазами возникают
сложные результирующие
колебания, которые называют
фигурами Лиссажу.
200
32
33. Если соотношение частот и разность фаз складываемых колебаний α = /2, наблюдается кривая, напоминающая восьмерку.
Если соотношение частотωy 2
ωx 1
и разность фаз складываемых
колебаний α = /2, наблюдается
кривая, напоминающая восьмерку.
200
33
34. При отношении круговых частот и разности фаз складываемых колебаний α = /2 наблюдается более сложная кривая.
При отношении круговых частотωy 3
ωx 2
и разности фаз складываемых
колебаний α = /2 наблюдается
более сложная кривая.
200
34
35. Замечание 1: Число касаний фигуры Лиссажу со сторонами прямоугольника, образованного амплитудами, равно величине отношения
частот.200
35
36. Замечание 2: Если частоты складываемых колебаний кратны nω и mω, тогда уравнения взаимно перпендикулярных колебаний запишутся в
видеx a sin nωt α1 ,
mωt α 2 .
y b sin
200
36
37. Траектория результирующего колебания будет замкнутой, её форма зависит от амплитуд a и b, круговых частот nω и mω и значений
начальных фаз α1 и α2.200
37
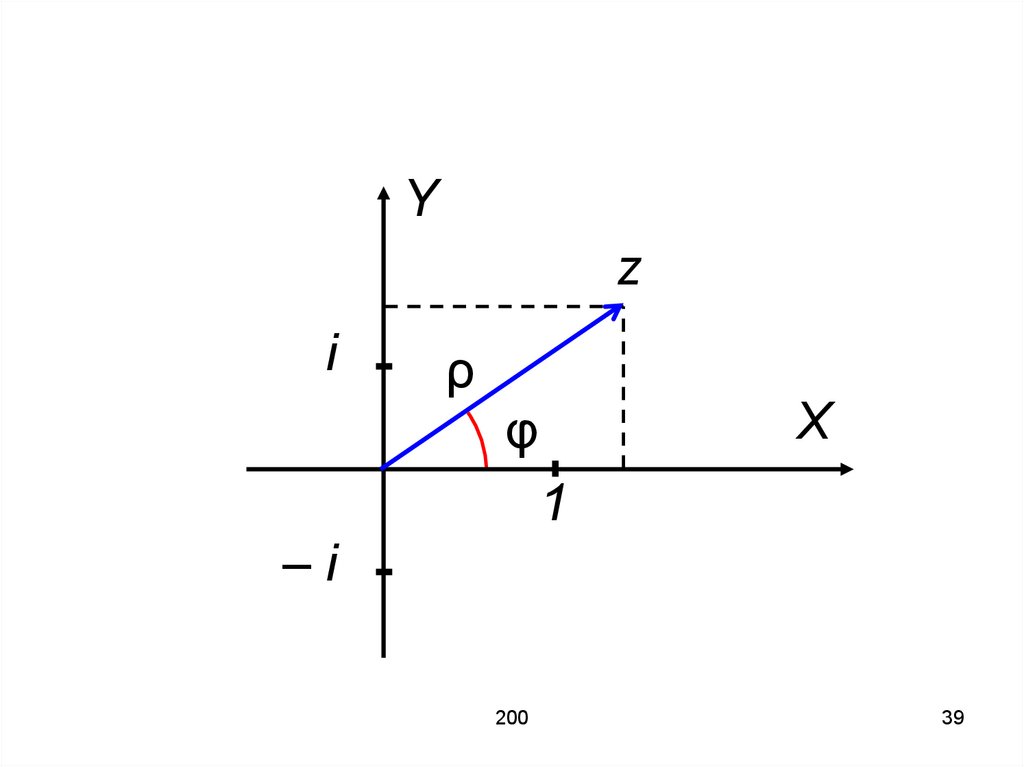
38. Комплексные числа Представление колебаний в комплексной форме Комплексное число z = x + iy, x, y – вещественные числа, i2 = – 1
– мнимая единица.200
38
39.
Yz
i
ρ
φ
X
1
–i
200
39
40. x = Re z – вещественная часть, y = Im z – мнимая часть, z* = x – iy – комплексно сопряжённое числу z = x + iy, – модуль, φ =
x = Re z – вещественная часть,y = Im z – мнимая часть,
z* = x – iy – комплексно
сопряжённое числу z = x + iy,
2
2
ρ z x y – модуль,
φ = arctg(y/x) – аргумент.
200
40
41. x = ρ cos φ, y = ρ sin φ, отсюда z = ρ(cos φ + i sin φ), Формула Эйлера: – комплексная форма,
x = ρ cos φ,y = ρ sin φ,
отсюда
z = ρ(cos φ + i sin φ),
Формула Эйлера:
e cos i sin
i
z ρe – комплексная форма,
i
i ωt α
z ρe
ρ exp i ωt α
200
41
42.
exp i exp icos
,
2
exp i exp i
sin
.
2i
200
42
43.
20043
44. 25. Уравнение динамики незатухающих колебаний. Пружинный, физический и математический маятники.
20044
45. Рассмотрим систему, с одной степенью свободы. Потенциальная энергия системы будет функцией одной переменной x: U = U(x).
Система обладает положениемустойчивого равновесия в точке
x = 0. В этом положении функция
U(x) имеет минимум. Будем
отсчитывать координату и
потенциальную энергию от этого
положения равновесия U(0) = 0.
200
45
46. Рассмотрим динамику гармонических колебаний на примере шарика на пружине. Fвнеш – x 0 x x
Рассмотрим динамикугармонических колебаний на
примере шарика на пружине.
Fвнеш
–x 0
200
x
x
46
47. Потенциальная энергия пружины Сила действующая на пружину Если сила по своей природе не является упругой, но соответствует
Потенциальная энергия пружины1 2
U x kx
2
Сила действующая на пружину
U
F
kx Fвн
x
Если сила по своей природе не
является упругой, но соответствует
данному выражению, то её называют
квазиупругой.
200
47
48. Запишем 2-й закон Ньютона для данной системы
m x kx2
ω0
2
x ω0 x
0
k m
200
48
49. Получим это же выражение из энергетических соотношений. Запишем полную механическую энергию системы и продифференцируем:
22
mv
kx
E T U
const
2
2
mvv kxx 0, v x a, v x
2
m x kx 0, x ω0 x 0 (*)
200
49
50. В отсутствие сил трения движение под действием квазиупругой силы описывается дифференциальным уравнением Такие колебания
В отсутствие сил трения движениепод действием квазиупругой силы
описывается дифференциальным
уравнением
x ω x 0
2
0
Такие колебания называются
свободными незатухающими.
200
50
51. Решение уравнения имеет вид Это закон гармонических колебаний – колебаний, которые совершаются по закону синуса или косинуса.
Решение уравнения xимеет вид
2
ω0 x
0
x A cos ω0t α
Это закон гармонических колебаний
– колебаний, которые совершаются
по закону синуса или косинуса.
200
51
52. Гармонический осциллятор –физическая система, поведение которой подчиняется уравнениям (динамическому и кинематическому):
Гармонический осциллятор –физическая система, поведение
которой подчиняется уравнениям
(динамическому и кинематическому):
x
2
ω0 x
0,
x x0 cos ω0t α .
200
52
53. Вообще, можно говорить о модели гармонического осциллятора. Рассмотри несколько примеров гармонических осцилляторов.
20053
54. Математический маятник – материальная точка массы m на нерастяжимой нити длины ℓ. Действующие силы на точку
F G Fнат ,ma mg T .
200
54
55.
α200
55
56. Запишем проекцию на касательную воспользуемся следующими формулами (угол α очень мал) x/ - расстояние, пройденное точкой по
Запишем проекцию на касательнуюmaτ mg sin α
воспользуемся следующими
формулами (угол α очень мал)
2
d x
aτ 2 , x α, aτ x α , sin α α.
dt
x/ - расстояние, пройденное точкой
по дуге. В итоге получаем уравнение
2
α ω0α
0, ω0 g .
200
56
57. Можно переписать это уравнение не для угла отклонения α, а для смещения x вдоль оси X. Используем формулы В итоге получаем
Можно переписать это уравнение недля угла отклонения α, а для
смещения x вдоль оси X.
Используем формулы
x x cos α α, cos α 1.
В итоге получаем уравнение
x
2
ω0 x
200
0
57
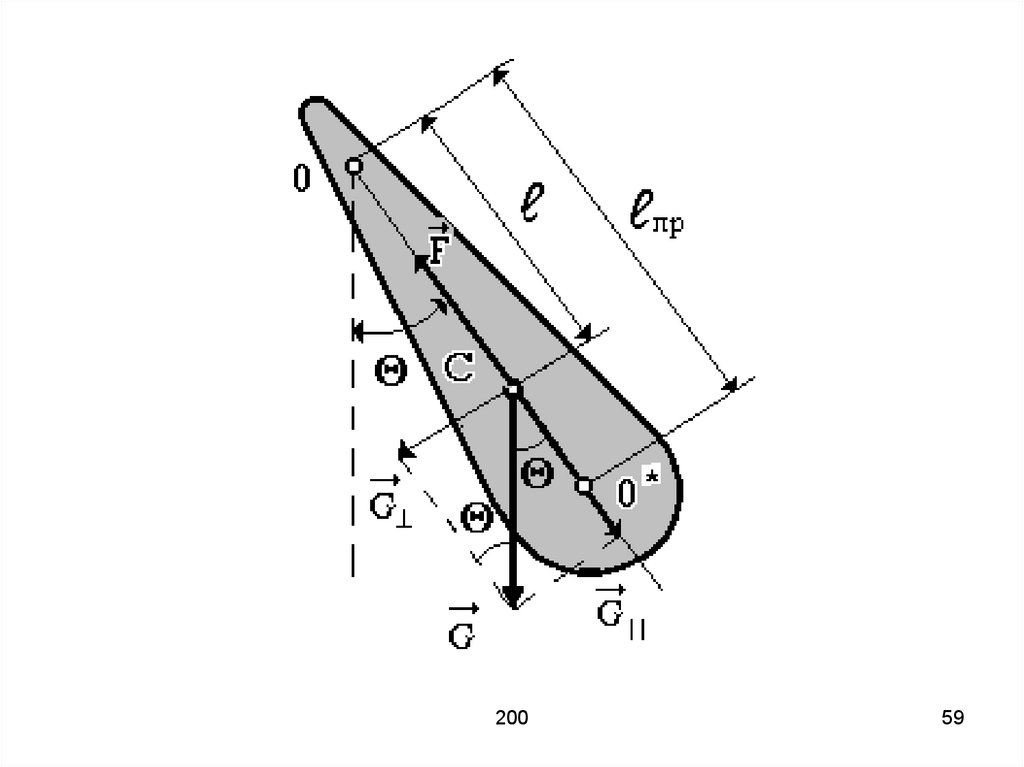
58. Физический маятник – реальная колебательная система. Физический маятник – некоторое тело, совершающее колебания относительно
оси, непроходящейчерез центр масс.
Запишем 2-й закон Ньютона для
вращательного движения
J α M mg sin α
200
58
59.
20059
60. В случае малых колебаний получаем закон гармонического осциллятора здесь m – масса тела, ℓ – расстояние от точки подвеса до
В случае малых колебаний получаемзакон гармонического осциллятора
2
α ω0α
0, ω0 mg J ,
здесь m – масса тела, ℓ – расстояние
от точки подвеса до центра масс, J –
момент инерции относительно точки
подвеса (оси качания), M – момент
сил, действующий на тело.
200
60
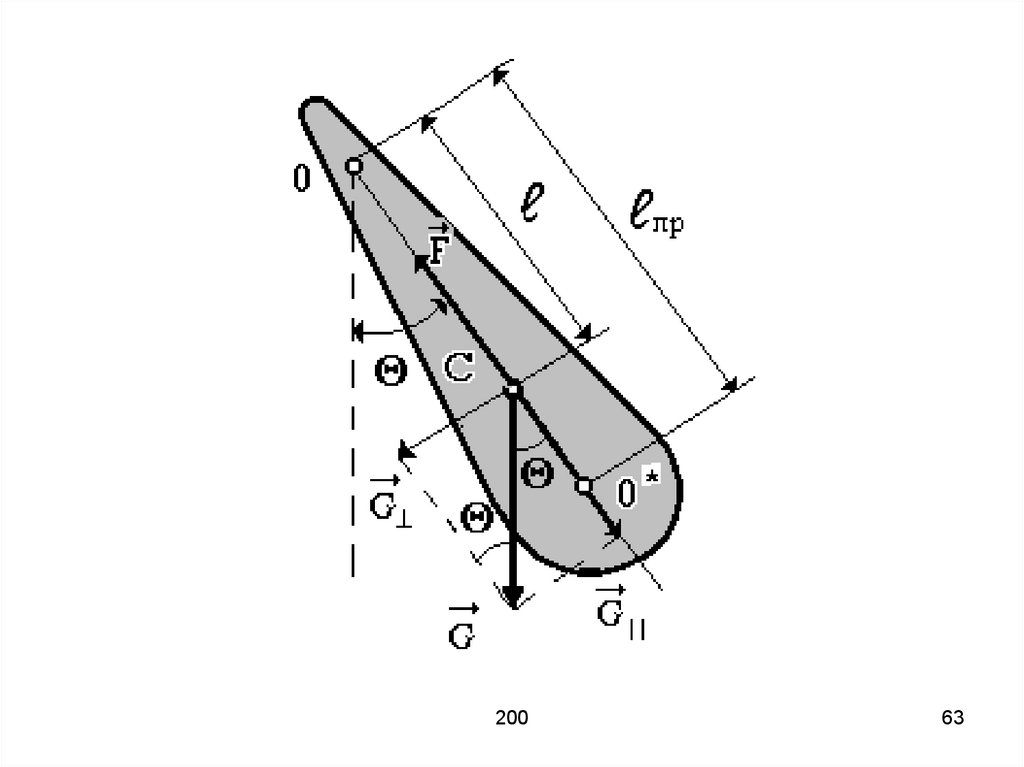
61. Приведенной длиной физического маятника называют длину такого математического маятника, когда периоды их колебаний совпадают
(Тфиз = Тматем):I
2π
2π
mg
200
пр
g
61
62. Приведенная длина физического маятника расстояние между точками 0 и 0* и есть приведенная длина физического маятника. Сами
Приведенная длина физическогомаятника
I
пр m .
расстояние между точками 0 и 0* и
есть приведенная длина
физического маятника. Сами точки 0
и 0* взаимозаменяемы, т. е. при
замене точки 0 на 0* и обратно
период колебаний физического
маятника сохраняется неизменным.
200
62
63.
20063
64. Согласно теореме Штейнера момент инерции можно представить следующим способом: I0 – момент инерции тела относительно оси,
Согласно теореме Штейнера моментинерции можно представить
следующим способом:
I I 0 m
2
I0 – момент инерции тела
относительно оси, проходящей через
центр масс.
Если ℓ = ℓ0 (ℓ0 – радиус инерции), то
период колебаний такого маятника
будет минимальным.
200
64
65. Колебательный контур (электрические колебания)
2q ω0 q
0, ω0
200
1
.
LC
65
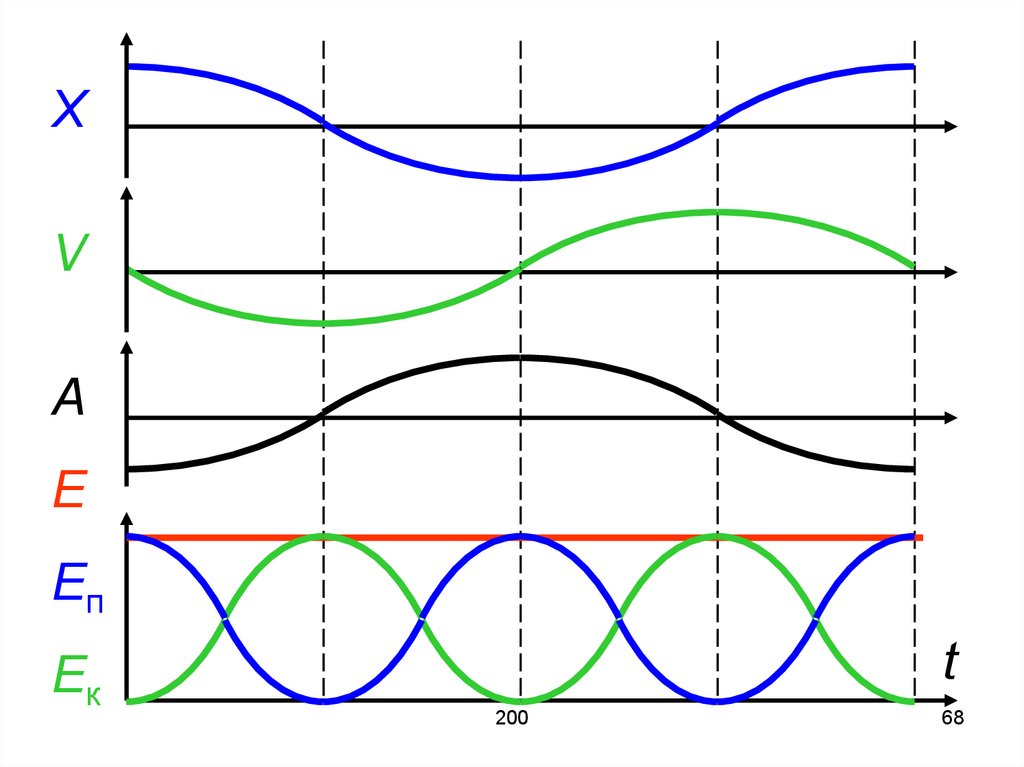
66. В отсутствии потерь энергии (нет диссипативных сил) выполняется закон сохранения механической энергии – полная механическая
энергия складывается изкинетической энергии грузика массой
m (при прохождении положения
равновесия эта энергия
максимальна) и из потенциальной
энергии (максимальна в крайних
положениях).
200
66
67. Запишем выражения для координаты, скорости, ускорения и суммарной механической энергии на примере пружинного маятника:
x X 0 cos ωt α ,dx
X 0ωsin ωt α ,
dt
d
2
a
X 0ω cos ωt α ,
dt
2
2
2
2
m
kx
m max kX 0
E
.
2
2
2
2
200
67
68.
XV
A
E
Eп
Eк
t
200
68
69.
20069
70. ЛЕКЦИЯ № 8 Затухающие колебания. Вынужденные колебания.
20070
71. ВОПРОСЫ 26. Затухающие колебания. Время релаксации. Логарифмический декремент колебаний, добротность. 27. Вынужденные
колебания.Амплитуда и фаза вынужденных
колебаний. Резонанс.
28. Связанные колебания.
Нормальные координаты и
нормальные моды колебаний.
200
71
72. 26. Затухающие колебания. Время релаксации. Логарифмический декремент колебаний, добротность. Апериодические процессы.
20072
73. В случае наличия сил сопротивления (трение) колебания описываются дифференциальным уравнением β – коэффициент затухания, r –
В случае наличия сил сопротивления(трение) колебания описываются
дифференциальным уравнением
x 2βx
2
ω0 x
0, 2β r m .
β – коэффициент затухания,
r – коэффициент сопротивления,
F = –rx – сила сопротивления.
200
73
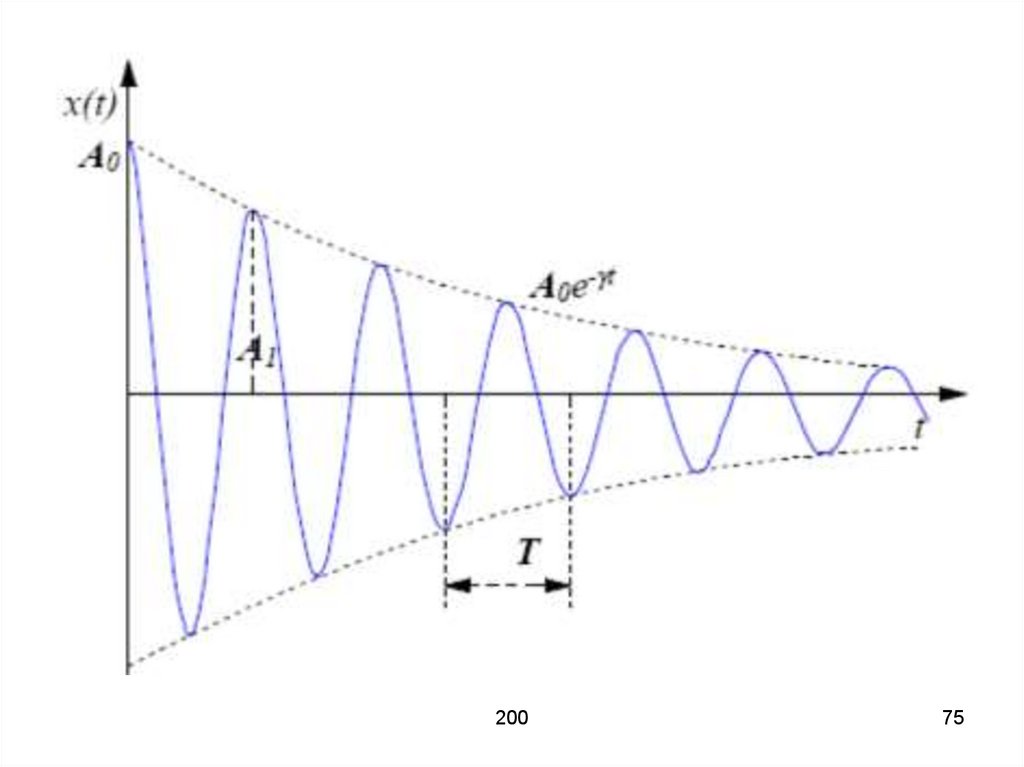
74. Рассмотрим случай с малым затуханием (β << ω0), в этом случае решение уравнения имеет вид здесь – частота затухающих колебаний,
Рассмотрим случай с малымзатуханием (β << ω0), в этом случае
решение уравнения имеет вид
x t Ae
βt
cos ωt α
β – частота
здесь ω
затухающих колебаний, амплитуда
колебаний уменьшается по
βt
экспоненте A t A0e
.
2
ω0
200
2
74
75.
20075
76. Рассмотрим характеристики затухающего колебания
20076
77. Сравним значения амплитуды в моменты времени, отличающиеся на t/: если t/ = 1/β, то t/ называется постоянной времени
Сравним значения амплитуды вмоменты времени,
отличающиеся на t/:
A t
Ae
βt
β t t e
A t t Ae
A t
e
A t 1 β
если t/ = 1/β, то t/ называется
постоянной времени осциллятора –
время, за которое амплитуда
колебаний уменьшается в «е» раз.
βt
200
77
78. Сравним значения амплитуды колебаний в моменты времени (t) и (t + T): d – логарифмический декремент затухания. Он показывает,
Сравним значения амплитудыколебаний в моменты времени (t) и
(t + T):
A t
βT
e
A t T
A t
d ln
βT
A t T
d – логарифмический декремент
затухания. Он показывает, на
сколько изменяется амплитуда
колебаний за 1 период.
200
78
79. Например, N – число колебаний функции x(t) после которых амплитуда уменьшается в «е» раз, тогда: Если d = 0,01, то за N = 100
Например, N – число колебанийфункции x(t) после которых
амплитуда уменьшается в «е» раз,
тогда:
t NT
T 1
1 ln z
d βT
t N Ne N z
Если d = 0,01, то за N = 100
колебаний амплитуда уменьшается в
«е» раз.
200
79
80. Добротность – это отношение средней энергии колебаний за некоторый период (E0) к потерям энергии (ΔE) за этот же период со
множителем 2π.π π
E0
Q
πNe 2π
d βT
E
200
80
81. Ангармонические колебания. Осциллятор с большим затуханием. β >> ω0
Ангармонические колебания.Осциллятор с большим затуханием.
β >> ω0
200
81
82. Предельный случай β = ω0 Этот случай в технике важен тем, что при таком соотношении параметров в случае внешнего воздействия
Предельный случай β = ω02π
2
2
ω ω0 β 0, T
.
ω
Этот случай в технике важен тем,
что при таком соотношении
параметров в случае внешнего
воздействия система может
вернуться в исходное состояние.
(Из-за силы трения система может
не вернуться в исходное положение)
200
82
83.
20083
84. 27. Вынужденные колебания. Амплитуда и фаза вынужденных колебаний. Резонанс.
20084
85. Если на систему действует внешняя вынуждающая сила, изменяющаяся по гармоническому закону F = F0cosωt, то колебание описывается
уравнениемx 2βx
2
ω0 x
f 0 cos ωt
f 0 F0 m – приведённая сила.
200
85
86. это линейное дифференциальное неоднородное уравнение с постоянными коэффициентами. Из математики известно, что его решением
x 2βx2
ω0 x
f 0 cos ωt
это линейное дифференциальное
неоднородное уравнение с
постоянными коэффициентами. Из
математики известно, что его
решением является решение
общего однородного уравнения и
частного решения собственно
неоднородного уравнения.
200
86
87. Линейное дифференциальное однородное уравнение с постоянными коэффициентами второго порядка: и его решение:
Линейное дифференциальноеоднородное уравнение с
постоянными коэффициентами
второго порядка:
x 2βx ω x 0,
2
0
и его решение:
x1 t Ae cos ωt α
βt
200
87
88. Частное решение линейного дифференциального неоднородного уравнения в комплексной форме: Решение уравнения вынужденных
Частное решение линейногодифференциального неоднородного
уравнения в комплексной форме:
x2 t
ω
f0
2
0
ω 2iωβ
2
e
iωt
Решение уравнения вынужденных
колебаний складывается из этих
двух решений: x1(t) + x2(t),
но x2(t) быстро затухает и его в
вынужденных колебаниях не
учитывают .
200
88
89. Запишем решение в вещественном виде (и без x2(t)): Амплитуда и фаза колебаний определяются выражениями
Запишем решение в вещественномвиде (и без x2(t)):
x a cos ωt .
Амплитуда и фаза колебаний
определяются выражениями
a
2ωβ
, tg 2
.
2
2
2
2
2 2
ω
ω
0
ω0 ω 4ω β
f0
200
89
90. Исследуем поведение амплитуды. При ω = 0 получаем стационарное отклонение a0 = f0/ω0. Максимальное значение амплитуды при
частотеda
2
2
ω ω0 2β ,
0 .
dω
максимум скорости при ω = ω0,
максимум ускорения
при
2
ω0
ω
2
2
ω0 β
200
90
91.
12
3
200
91
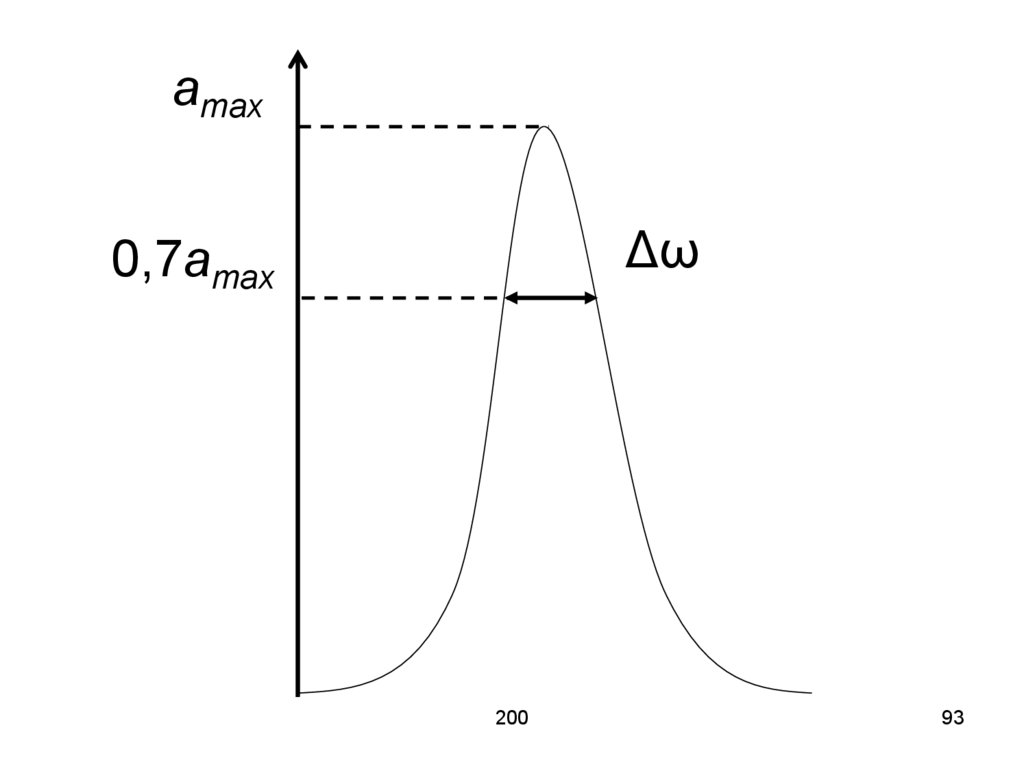
92. Эта кривая называется резонансной кривой. Если (в случае малых затуханий) провести горизонтальную линию по уровню то можно
Эта кривая называется резонанснойкривой. Если (в случае малых
затуханий) провести горизонтальную
линию по уровню
a amax
2
то можно задать добротность
следующим образом
amax
ω0 π ω0
Q
a0
2β d ω
200
92
93.
amaxΔω
0,7amax
200
93
94. Резонанс – это явление возбуждения сильных колебаний при частоте внешней возбуждающей силы, равной частоте системы. Но как
видно из формулырезонансной частоты, резонанс
достигается в случае не строгого
равенства частоты собственной и
частоты внешней периодической
силы: ω ω02 2β 2
200
94
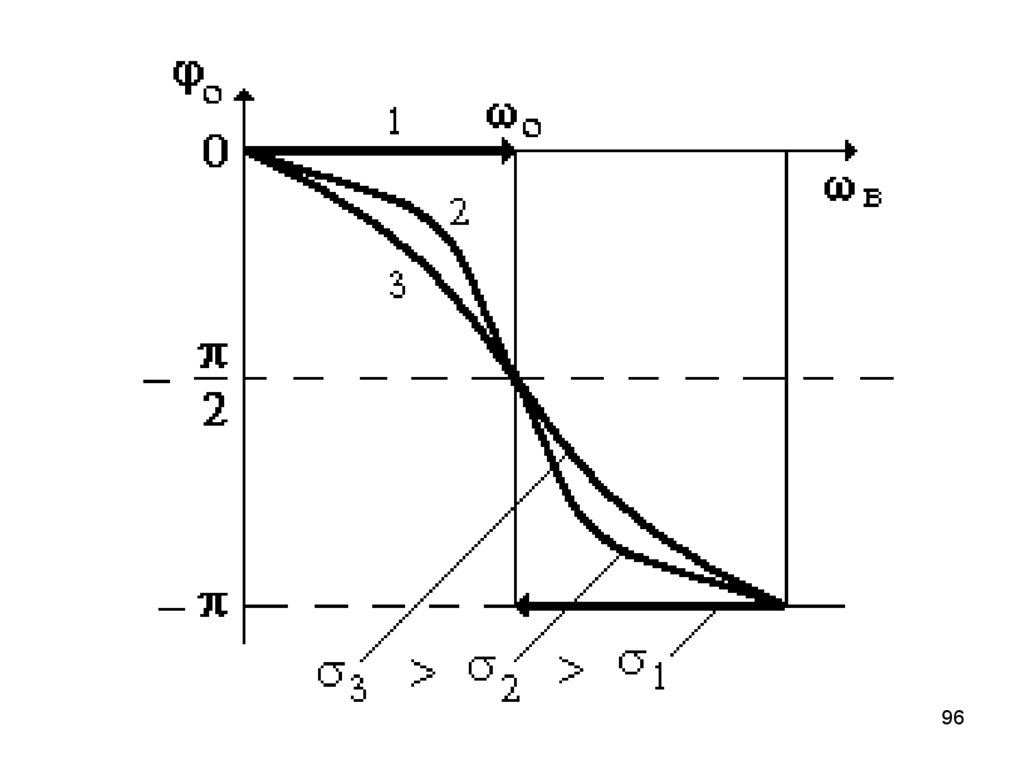
95. Рассмотрим фазу в случае вынужденных колебаний и в случае резонанса рассмотрим фазовую резонансную кривую
Рассмотрим фазу в случаевынужденных колебаний и в случае
резонанса
2ωβ
tg 2
, tg рез .
2
ω0 ω
рассмотрим фазовую резонансную
кривую
200
95
96.
20096
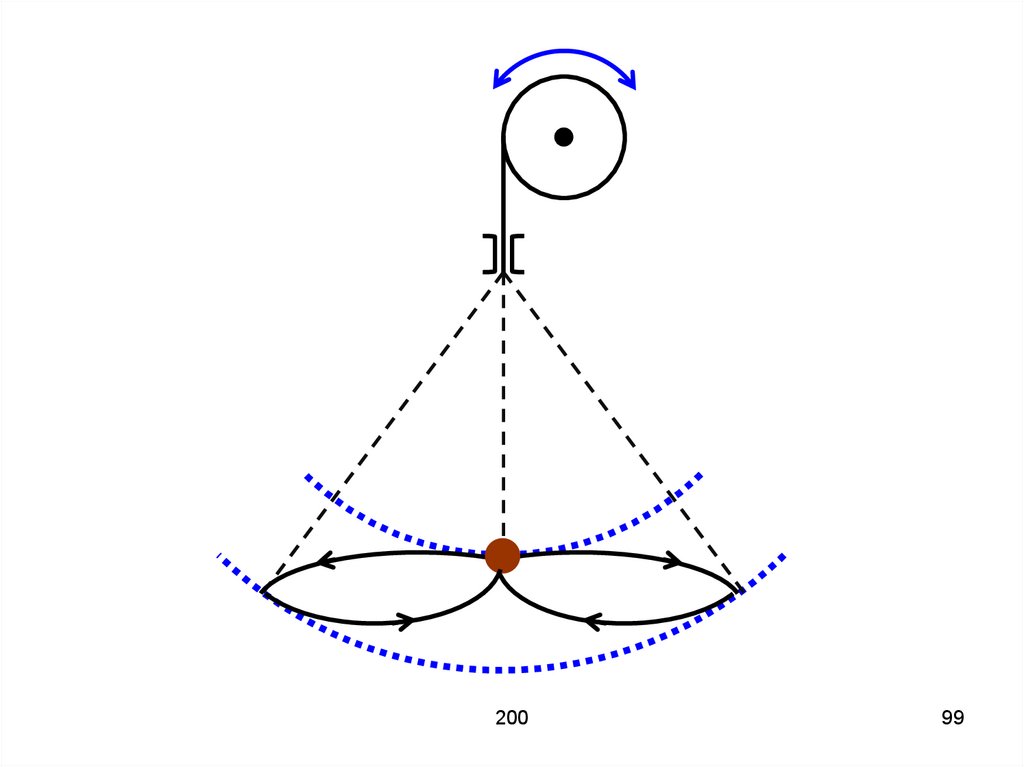
97. Параметрический резонанс – это явление заключается в совершаемом в такт с колебаниями периодическим изменением какого-либо
Параметрический резонанс– это явление заключается в
совершаемом в такт с колебаниями
периодическим изменением какоголибо параметра системы.
200
97
98. Возьмём математический маятник. Будем уменьшать длину подвеса маятника в положениях равновесия и увеличивать в крайних
положениях. В результате этогомаятник будет сильно
раскачиваться.
200
98
99.
20099
100. Увеличение энергии маятника происходит за счёт работы, которую совершает сила, действующая на нить. В положениях равновесия
силанатяжения нити больше, чем в
крайних, поэтому прирост энергии
здесь больше, чем убыль в крайних.
200
100
101.
200101
102. 28. Связанные колебания. Нормальные координаты и нормальные моды колебаний.
200102
103. Рассмотрим закономерности поведения колебательных систем с двумя степенями свободы на следующем примере: пусть два маятника,
связаныпружиной, будем рассматривать
малые колебания, так что
sinα1 ≈ α1, sinα2 ≈ α2.
200
103
104.
О1h
О2
α1(t)
k
m1
200
α2(t)
m2
104
105. Пружина жёсткости k закреплена на расстоянии h от точек подвеса O маятников, причём при α1= α2 = 0 пружина не деформирована.
200105
106. Уравнение движения для первого маятника имеет вид где m1ℓ12 – момент инерции относительно оси O1, (–mgℓ sin α) ≈ mgℓα – момент
Уравнение движения I α Mдля первого маятника имеет вид
m α 1 m1 g 1α1 k hα2 hα1 h,
2
1 1
где m1ℓ12 – момент инерции
относительно оси O1,
(–mgℓ sin α) ≈ mgℓα
– момент силы тяжести,
h(α2 – α1) – деформация (удлинение)
пружины,
200
106
107. kh2(α2 – α1) – момент упругой силы относительно той же оси. Аналогично, для второго маятника
m α 2 m2 g 2α 2 k hα 2 hα1 h2
2
m2 2 α 2 m2 g 2α 2 kh α 2 α1 ,
2
2 2
200
107
108. Эти два уравнения преобразуем к виду где собственные частоты каждого маятника.
Эти два уравнения преобразуем квиду
α 1 ω α σ α1 α 2 ,
2
2
α 2 ω02α 2 σ 2 α 2 α1 ,
2
01 1
g
где ω01
1
2
1
g
и ω02
2
собственные частоты каждого
маятника.
200
108
109. Частоты ω01 и ω02 частоты, которые были бы, если бы не было связи между ними. – коэффициенты, описывающие взаимодействие
Частоты ω01 и ω02 частоты, которыебыли бы, если бы не было связи
между ними.
2
2
kh
kh
2
σ
, σ2
2
2
m1 1
m2 2
– коэффициенты, описывающие
взаимодействие маятников,
обусловленное пружиной.
2
1
200
109
110. В общем случае колебания не будут гармоническими. Рассмотрим простейший случай: ω01 = ω02 = ω0, σ1 = σ2 = σ. Здесь может быть
два крайнихслучая.
200
110
111. 1) α1 = α2, Решение:
α 1 ω α1 0,2
α 2 ω0 α 2 0.
1) α1 = α2,
2
0
Решение: α1 α 2 Acos ωt .
α
k
200
α
111
112. 2) α1 = – α2, Решение:
ωσ α
2) α1 = – α2, α 1 ω σ α1 0,
α 2
Решение:
2
0
2
0
2
2
2
0.
α1 α 2 Acos ω σ t .
α
k
200
2
0
2
α
112
113. Найденные решения называются нормальными колебаниями или модами. 1-я мода 2-я мода
Найденные решения называютсянормальными колебаниями или
модами.
1-я мода
α11 t A1cos ω1t 1 ,
α12 t B1cos ω1t 1 .
2-я мода
α 21 t A2cos ω2t 2 ,
α 22 t B2cos ω2t 2 .
200
113
114. В общем случае решение есть суперпозиция мод: Конкретный вид этого решения зависит от начальных условий: A1, A2, φ1, φ2 (A1 =
ω1 ω0 , ω2 ω σ ,2
0
B1 A1 ,
2
B2 A2 .
В общем случае решение есть
суперпозиция мод:
α1 t A1cos ω1t 1 A2cos ω2t 2 ,
α 2 t B1cos ω1t 1 B2cos ω2t 2 .
Конкретный вид этого решения
зависит от начальных условий:
A1, A2, φ1, φ2 (A1 = B1, A2 = – B2).
200
114
115. Другими словами, колебания осцилляторов представляют собой суперпозицию двух гармонических колебаний разных частот ω01, ω02.
При произвольных начальныхусловиях колебания не являются
гармоническими.
(Это решение для случая
ω01 = ω02 = ω0, σ1 = σ2 = σ.)
200
115
116.
200116
117. ЛЕКЦИЯ № 10 Колебания.
200117
118. ВОПРОСЫ 29. Теорема Фурье. Спектральное разложение. Принцип радиосвязи. 30. Ангармонические колебания. Автоколебания.
200118
119. 29. Теорема Фурье. Спектральное разложение. Принцип радиосвязи.
200119
120. Теорема Фурье: Любая периодическая функция может быть разложена преобразованием Фурье, то есть представлена в виде суммы
конечного или бесконечного числасинусоидальных и/или
косинусоидальных функций.
200
120
121. Запишем ряд Фурье в комплексной форме: здесь f(t) – периодическая функция, Ck – коэффициенты, i – мнимая единица, ωk – частоты,
Запишем ряд Фурье в комплекснойформе:
f t Ck e
iω k t
k 0
здесь f(t) – периодическая функция,
Ck – коэффициенты, i – мнимая
единица, ωk – частоты,
соответствующие коэффициентам
Ck, ωk = k·Ω, k = 0, 1, 2, … ,
Ω – основная частота.
200
121
122. Для вычисления Ck умножим обе части на и проинтегрируем: если k ≠ m, то интеграл справа равен 0, если k = m, то период Т.
Для вычисления Ck умножим обеiω m t
части на e
и проинтегрируем:
T
0
f t e
iωmt
T
dt Ck e
k 0
i ωk ωm t
dt
0
если k ≠ m, то интеграл справа равен
0, если k = m, то период Т. Отсюда
T
1
iωmt
Cm f (t )e dt
T0
200
122
123. В тригонометрическом виде теорема Фурье выглядит следующим образом
a0f t ak cos kt bk sin kt ,
2 k 1
α 2π
1
ak
f t cos kt dt , k 0,1,2, ,
π α
α 2π
1
bk
f t sin kt dt , k 1,2, .
π α
200
123
124. Пример: Рассмотрим разложение периодической чётной функции (в разложении будут только косинусы) с использованием первых десяти
членов (a0, a1, a3, a5, a7, a9 ≠ 0;a2, a4, a6, a8 = 0).
200
124
125.
1,51
0,5
0
0
20
40
60
80
100
120
-0,5
-1
-1,5
-2
-2,5
200
125
126. Модулированное колебание здесь A(t) – амплитудная модуляция, ω(t) – частотная модуляция, φ(t) – фазовая модуляция.
Модулированное колебаниеX t A t cos ω t t t
здесь A(t) – амплитудная модуляция,
ω(t) – частотная модуляция,
φ(t) – фазовая модуляция.
200
126
127. Рассмотрим синусоидальную модуляцию: A0, α, Ω – const, ω – несущая частота, α – глубина модуляции, Ω – частота модуляции.
Рассмотрим синусоидальнуюмодуляцию:
A t A0 1 α cos t
A0, α, Ω – const, ω – несущая
частота, α – глубина модуляции,
Ω – частота модуляции.
200
127
128. Получаем в итоге колебание на трёх частотах: С помощью гармонического осциллятора можно выделить одну из частот, совпадающую с
Получаем в итоге колебание на трёхчастотах:
X t A0 cos ωt
αA0
cos ω t cos ω t
2
С помощью гармонического
осциллятора можно выделить одну
из частот, совпадающую с его
собственной ω.
200
128
129. Теорема Фурье для непериодической функции X(t): Здесь имеет место непрерывное множество синусоидальных колебаний, частоты
Теорема Фурье длянепериодической
функции X(t):
i ωt
X t a ω e dω,
0
1
i ωt
a ω
X t e dt.
2 π
Здесь имеет место непрерывное
множество синусоидальных
колебаний, частоты которых
непрерывно заполняют
определённый интервал.
200
129
130. X(t) a(ω) t ω
a(ω)X(t)
ω
t
200
130
131. Принцип радиосвязи Человеческое ухо воспринимает частоту 20 – 20000 Гц, но для передачи такого сигнала нужны гигантские антенны
L = λ/2 = c/2ν ~ 105 м.λ – длина волны, c – скорость света,
ν – частота.
200
131
132. Для передачи используют радиоволны на частотах 105 – 108 Гц и даже на частотах 1010 Гц. Сигнал модулируют низкой частотой
(звуковая частота), а передают навысокой частоте (радиоволны).
200
132
133. Модуляция может быть амплитудной, фазовой, частотной. Пример амплитудной модуляции (f(t) – модулирующая функция):
I I 0 1 f t sin ωt200
133
134. В приёмной антенне сигнал необходимо демодулировать, детектировать. Схема простейшего детектора. Диод Uвх Uвых
200134
135. 1) сигнал 3) сигнал после детектора (диода) 2) модулирующий 4) детектированный сигнал сигнал на выходе
1) сигнал3) сигнал после
детектора (диода)
2) модулирующий
сигнал
4) детектированный
сигнал на выходе
200
135
136.
200136
137. 30. Ангармонические колебания. Автоколебания.
200137
138. Ангармонические колебания Уравнение динамики математического маятника имеет вид: В случае малых отклонений (α ≈ sin α)
Ангармонические колебанияУравнение динамики
математического маятника имеет
вид:
α ω sin α 0
2
0
В случае малых отклонений
(α ≈ sin α) колебания можно считать
гармоническими:
α ω α 0
2
0
200
138
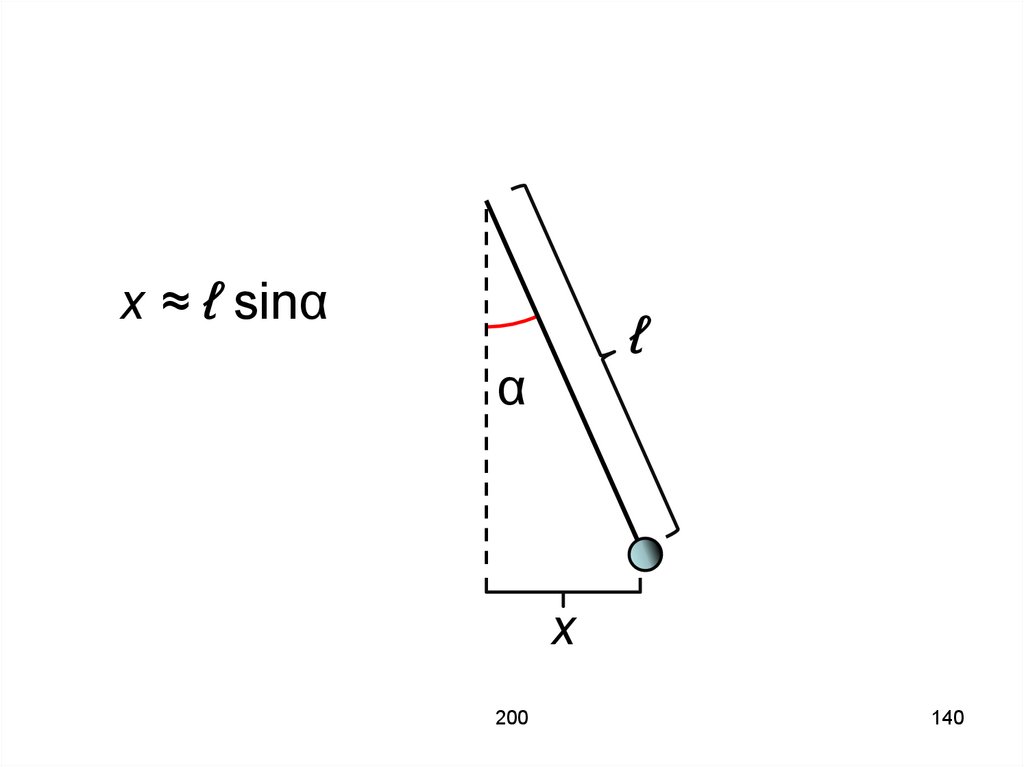
139. Именно в этом случае, в случае гармонических колебаний, период не зависит от амплитуды колебаний. Возвращающая сила прямо
пропорциональна смещению:x
F mg tgα mg α mg
200
139
140.
x ≈ ℓ sinαℓ
α
x
200
140
141. В случае не малых отклонений колебания перестают быть гармоническими: сила нелинейно зависит от смещения
В случае не малых отклоненийα α α
α
sin α α α
3! 5! 7!
3!
3
5
7
3
колебания перестают быть
гармоническими: сила нелинейно
зависит от смещения
F mg tgα
200
141
142. В этом случае период зависит от амплитуды. Примеры: маятник с большими отклонениями, пружинный маятник с переменной жёсткостью,
колебательный контур, в катушкекоторого сердечник, при больших
амплитудах.
200
142
143. Автоколебания Вынужденные незатухающие колебания в реальных системах, период и амплитуда которых не зависит от характера
внешнеговоздействия, а определяется
свойствами самой
автоколебательной системы.
200
143
144. Автоколебательные системы – системы, способные совершать незатухающие колебания в отсутствие периодического внешнего
воздействия.200
144
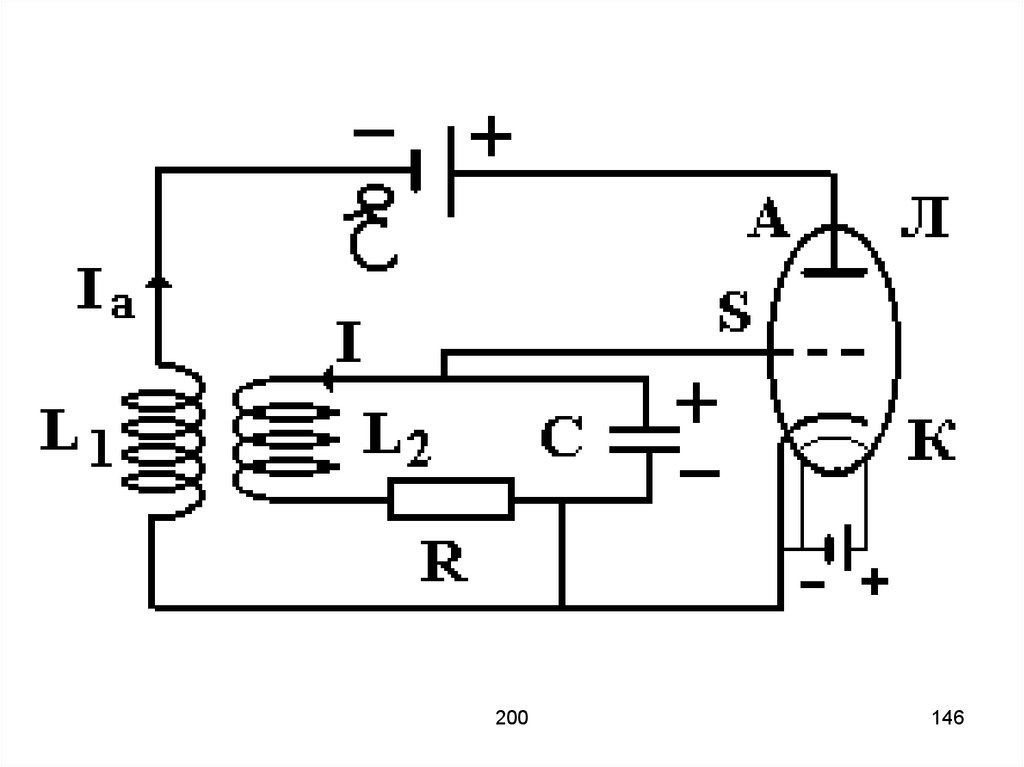
145. Кратко рассмотрим возникновение автоколебаний на примере лампового генератора электромагнитных колебаний, где Л – лампа-триод,
S – сетка, А – анод, К– катод, L2 – индуктивность, R –
сопротивление, C – ёмкость, L1 –
катушка обратной связи, Ԑ ЭДС
источника тока.
200
145
146.
200146
147. При разряде конденсатора через лампу будет течь анодный ток Ia, а потенциал сетки упадет, что приведет к уменьшению анодного
тока.Если витки катушек намотаны
параллельно, то за счет взаимной
индукции затухание в контуре
увеличится.
Возникнет отрицательная обратная
связь.
200
147
148. Если же витки катушек намотаны антипараллельно, то затухание в контуре уменьшится, амплитуда колебаний начнет возрастать.
Возникнет положительная обратнаясвязь.
200
148
149. Вид фазовой кривой для такого случая приведен на рисунке.
200149
150. Уравнение для данного контура можно записать в виде: q – заряд на обкладках конденсатора.
Уравнение для данного контураможно записать в виде:
q
MS
Lq Rq
q
C
C
или
2
q 2δq ω0 q 0
q – заряд на обкладках
конденсатора.
200
150
151. M, S = const, S – крутизна сеточной характеристики; М – коэффициент взаимной индукции, колебания в автоколебательном контуре
R MS2δ
L LC
M, S = const, S – крутизна сеточной
характеристики; М – коэффициент
взаимной индукции,
колебания в автоколебательном
контуре будут подчиняться закону:
q q0e
δt
Acosωt B sin ωt
200
151
152. Если выполняется условие -SM / C > R (δ < 0), то состояние равновесия будет неустойчивым фокусом. Любое малое отклонение
Если выполняется условие -SM / C >R (δ < 0), то состояние равновесия
будет неустойчивым фокусом.
Любое малое отклонение системы
от равновесия будет возрастать.
Колебательный контур начнет
самовозбуждаться.
200
152
153. В контуре устанавливаются автоколебания с постоянной амплитудой, которая не зависит от начальных условий, а определяется
параметрами системы.Это есть общее свойство всех
автоколебательных систем.
200
153
154. Рол нелинейности. Амплитуда автоколебаний от начальных условий не зависит. Автоколебания могут возбуждаться периодическими
внешними силами,но период автоколебаний не зависит
от периода этих сил.
200
154
155. Релаксационные колебания – это колебания, которые происходят под действием постоянной вынуждающей силы за счёт перехода системы
из одногосостояния в другое (пример: ветер и
дерево). Параметрические
колебания – колебания за счёт
изменения параметра системы.
200
155
156.
200156
157. ЛЕКЦИЯ № 11 Волны
200157
158. ВОПРОСЫ 31. Волны. Типы и характеристики волн. Волновое уравнение и уравнение плоской бегущей волны. Стоячие волны (вывод). 32.
Упругие волны. Энергия волны.Вектор Умова.
33. Поведение звука на границе
раздела двух сред. Ударные волны.
Эффект Доплера.
200
158
159. Вопрос № 26. 31. Волны. Типы и характеристики волн. Волновое уравнение и уравнение плоской бегущей волны. Стоячие волны
(вывод).200
159
160. Волна – процесс распространения колебаний в пространстве с течением времени. Таким образом, волна это некоторая функция S =
S(x, y, z, t).Эту функцию можно представить в
следующем виде:
S(z, t) = S(z – vt)
– распространение волны вдоль оси
Z.
200
160
161. Волновое уравнение (пространственное и вдоль оси Z) оператор Лапласа
Волновое уравнение(пространственное и вдоль оси Z)
1 S
S 1 S
S 2 2 0,
0
.
2
2
2
t
z t
2
2
2
2
оператор Лапласа
2 2 2
x
y
z
2
2
2
2
200
161
162. Рассмотрим плоскую монохроматическую волну (на одной частоте) S(z, t) = a cos(ωt – kz)z. ω – циклическая частота волны, k =
2π/λ = ω/ʋ – волновой вектор,ʋ = ω/k = λω/2π – фазовая скорость,
λ – длина волны,
Т – период,
(ωt – kz) – фаза волны.
200
162
163. Для плоской бегущей волны S и фаза одинаковы, синфазны, в любой точке (x, y) плоскости z = const. Поверхности, где колебания
синфазны, называются волновымиповерхностями.
Поверхность, до которой дошла
волна в данный момент времени,
называется волновым фронтом.
200
163
164. Волновой вектор показывает направление распространения волны
S r , t a cos ωt k r200
164
165. Стационарные волны – волновая функция постоянна. Синусоидальная волна – колебания в некоторой точке пространства происходят по
закону синуса.Скалярные волны – волновое
возмущение описывается скалярной
величиной (плотность, давление).
Векторные волны – волновое
возмущение описывается векторной
величиной (напряжённость)
200
165
166. Продольные волны – колеблющая величина совершает колебания параллельно волновому вектору (вдоль направления распространения
волны S || k ),Поперечные волны – колеблющая
величина совершает колебания
перпендикулярно волновому вектору
(поперёк направления
распространения волны S k )
200
166
167. Плоскополяризованная волна – волна, колебания в которой вектора S происходят в фиксированной плоскости. Эта плоскость
называется плоскостьюполяризации.
200
167
168. Стоячие волны Рассмотрим сложение двух волн: S1(z, t) = acos(ωt – kz), S2(z, t) = acos(ωt + kz), одна волна падающая (вектор –
k),другая волна отражённая от какойлибо преграды (вектор + k).
200
168
169. В результате сложения падающей и отражённой волны получаем выражение: S1 + S2 = 2a cos(kz) cos(ωt). Временные и
пространственныекоэффициенты оказались
разделены. Это выражение
описывает волну, у которой нет
перемещения волновых
поверхностей. Это и есть стоячие
волны.
200
169
170. Если волна отражается от среды менее плотной, чем среда распространения, то сдвига фаз в волне не происходит. В этой точке у
стоячих волн всегда максимумамплитуды – пучность.
Если волна отражается от более
плотной среды, то происходит сдвиг
фазы на пол длины волны. В этой
точке у волны узел – нулевая
амплитуда.
200
170
171.
200171
172.
200172
173. 32. Упругие волны. Энергия волны. Вектор Умова.
200173
174. Упругие волны в твёрдых телах Рассмотрим стержень, на который оказывается некоторое ударное воздействие. z ξ z/ ξ/ F здесь z –
координата, ξ – новаякоординаты частиц, Δz – смещение
частиц из-за удара F (z + Δz = ξ).
200
174
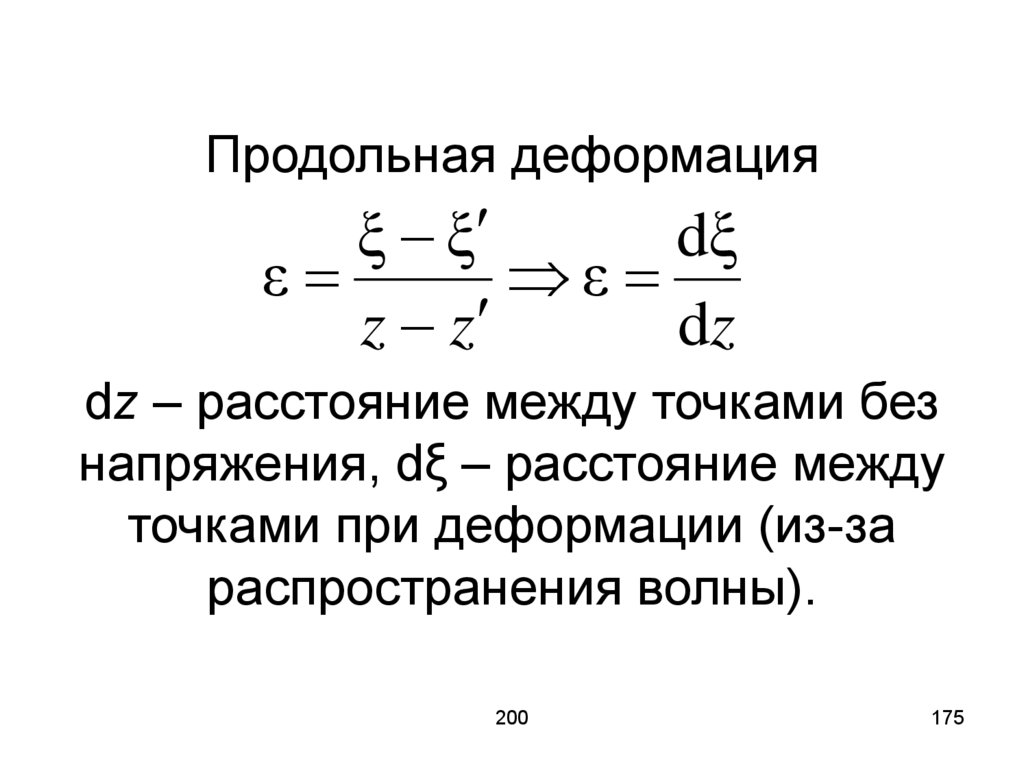
175.
Продольная деформацияξ ξ
dξ
ε
ε
z z
dz
dz – расстояние между точками без
напряжения, dξ – расстояние между
точками при деформации (из-за
распространения волны).
200
175
176. Сами частицы стержня смещаются незначительно, приводя в движение соседние частицы, те передают импульс соседним частицам и т.д.
–именно так малые смещения частиц
приводят к распространению
волнового возмущения на большие
расстояния.
200
176
177. Волновое уравнение упругих деформаций ʋ2 = E/ρ0 – скорость волны, E – модуль Юнга, ρ0 – плотность вещества без нагрузки.
Волновое уравнение упругихдеформаций
ξ 1 ξ
0
.
2
2
2
z t
2
2
ʋ2 = E/ρ0 – скорость волны, E –
модуль Юнга, ρ0 – плотность
вещества без нагрузки.
200
177
178. Упругие волны в газах и жидкостях Волна в газах или жидкостях распространяется за счёт изменения давления и плотности. Волновое
уравнениеξ 1 ξ
0
.
2
2
2
z t
2
2
ξ – смещение центра масс участка
среды.
200
178
179. – скорость волны, dp – изменение давления, dρ – изменение плотности.
ξdp
– скорость волны,
d
dp – изменение давления, dρ –
изменение плотности.
200
179
180. Для газов p0 – давление в обычных условиях, ρ0 –плотность в обычных условиях, γ – показатель адиабаты, Cp, CV – теплоёмкости
Для газовCp
ρRT
p0
RT0
p
, γ
γ
, γ
,
M
ρ0
M
CV
p0 – давление в обычных условиях,
ρ0 –плотность в обычных условиях,
γ – показатель адиабаты, Cp, CV –
теплоёмкости при постоянном
давлении и объёме
1 моля газа, соответственно.
200
180
181. Энергия волны В упругой волне энергия складывается из кинетической и потенциальной составляющих. Объёмная плотность энергии
ρEε
w
2
2
2
200
2
181
182. Волновой процесс представляет собой передачу энергии без передачи вещества. Введём вектор – плотность потока энергии (вектор
Умова-Пойтинга):q σ , q σ n.
σ = Eε – напряжение, n – единичный
вектор, который направлен так же
как и направление бегущей волны.
200
182
183. В газе или жидкости Поток энергии через площадку S за время dt:
В газе или жидкостиq p n
Поток энергии через площадку S за
время dt:
dW qSdt
200
183
184.
200184
185. 33. Поведение звука на границе раздела двух сред. Ударные волны. Эффект Доплера.
200185
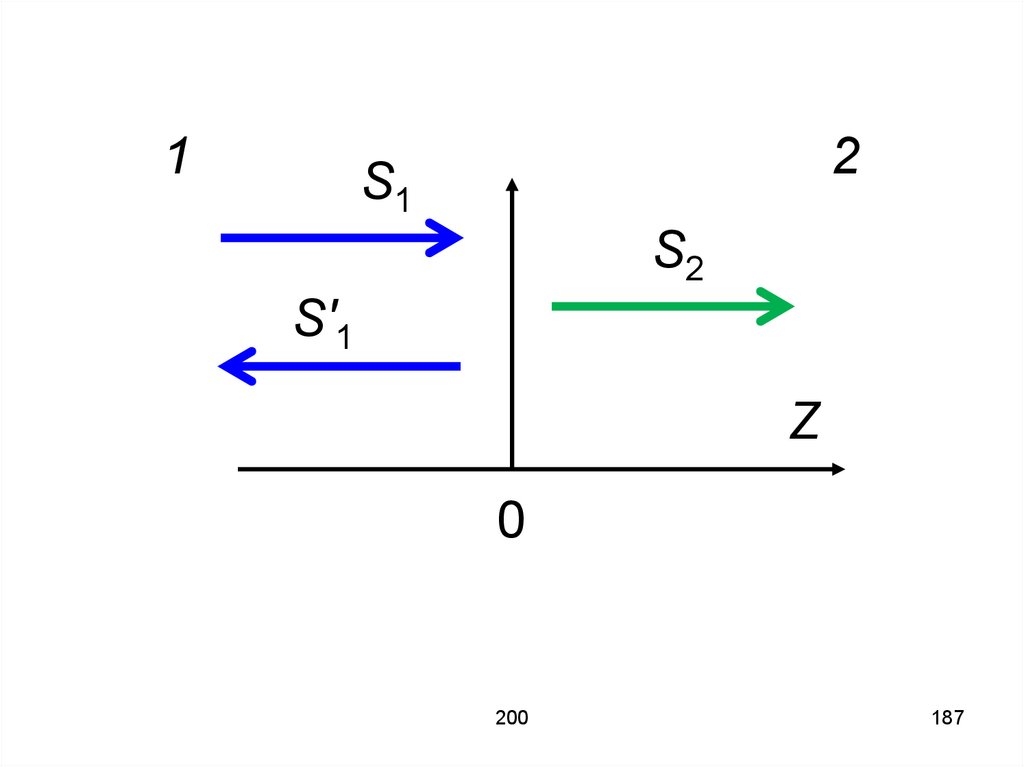
186. Поведение звука границе раздела двух сред. Рассмотрим плоскую звуковую волну S1 = a1 cos(ωt – k1z), в области 1 z < 0. На
Поведение звука границе разделадвух сред.
Рассмотрим плоскую звуковую волну
S1 = a1 cos(ωt – k1z),
в области 1 z < 0.
На границе раздела (z = 0) волна
разделяется на две:
прошедшую (S2) и отражённую (S′1).
200
186
187.
12
S1
S2
S′1
Z
0
200
187
188. Прошедшая волна S2 = a2 cos(ωt – k2z), отражённая волна S′1 = a′1 cos(ωt + k1z), k1 ≠ k2, ʋ1 ≠ ʋ2.
200188
189. Запишем граничные условия: E1k1(a1 – a′1) = E2k2a2. Это условие получено из условия равенства сил, действующих на границе со
стороны одной среды надругую.
200
189
190. Из условия равенства сил здесь
Из условия равенства сил1 γ
2γ
a1
a1 , a2
a1.
1 γ
1 γ
здесь
E2 k 2
γ
E1k1
200
E2 ρ 2
E1ρ1
190
191. Порог слышимости (минимальная слышимая интенсивность звука) I0 ≈ 10–12 Вт/м2, Болевой порог I ≈ 1012 I0. Интенсивность звука
выражают вдецибелах:
β = 10log I/I0,
1010 I0 ÷ β = 100 дБ,
порог слышимости β0 = 0 дБ,
болевой порог β = 120 дБ.
200
191
192. Ударные волны В случае малых возмущений среда линейна – волна синусоидальна. С ростом амплитуды возмущения среда теряет
линейность, волнастановится не синусоидальной.
Участки с большим возмущением
имеют большую скорость. Возникают
волны различных частот. В этом
случае говорят о взрывной волне.
200
192
193. Эффект Доплера – изменение частоты излучения при относительном движении источника и приёмника (верхний знак относится к
сближению, нижний – красхождению)
u1
1 cosα1
зв u1cosα1
зв
ν νo
νo
.
u
зв u2 cosα 2
1 2 cosα
зв
2
200
193
194. Здесь ν – частота принимаемого сигнала, ν0 – частота испускаемого сигнала, ʋзв – скорость сигнала (звукового или светового), u1
–скорость приёмника, u2 – скорость
источника, α1 – угол между
направлением на источник и
движением приёмника, α2 – угол
между направлением на приёмник и
направлением движения источника.
200
194
195. И u2 α2 ʋзв α1 П u1
Иu2
α2
ʋзв
П
α1
u1
200
195
196. Движение и приёмника и источника вдоль одной линии. На встречу друг другу Удаляются друг от друга
Движение и приёмника и источникавдоль одной линии.
На встречу друг другу
зв u1
ν νo
.
зв u2
Удаляются друг от друга
зв u1
ν νo
.
зв u2
200
196