

















")



")
 Векторы компланарны (линейно зависимы)")
 Математика
МатематикаПохожие презентации:







")
. Векторы на плоскости и в пространстве")

Основы векторной алгебры. Векторы на плоскости и в пространстве
1. ОСНОВЫ ВЕКТОРНОЙ АЛГЕБРЫ
2. 1. Векторы на плоскости и в пространстве
1. ВЕКТОРЫ НА ПЛОСКОСТИ И ВПРОСТРАНСТВЕ
3.
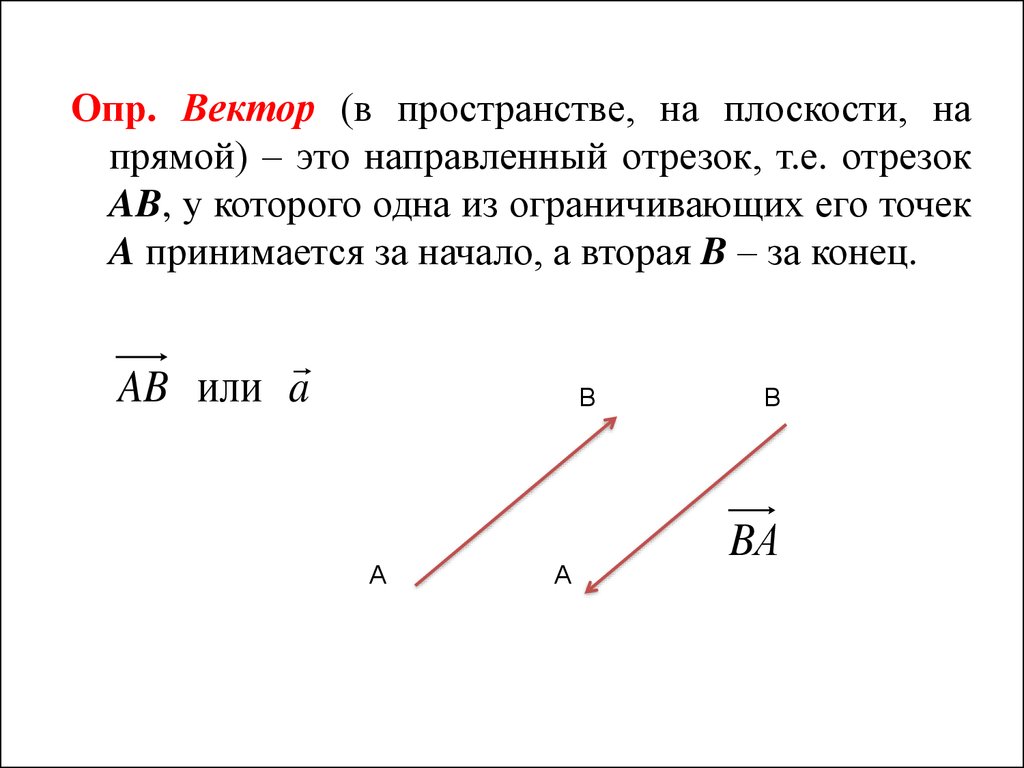
Опр. Вектор (в пространстве, на плоскости, напрямой) – это направленный отрезок, т.е. отрезок
AB, у которого одна из ограничивающих его точек
A принимается за начало, а вторая B – за конец.
AB или a
B
A
A
B
BА
4.
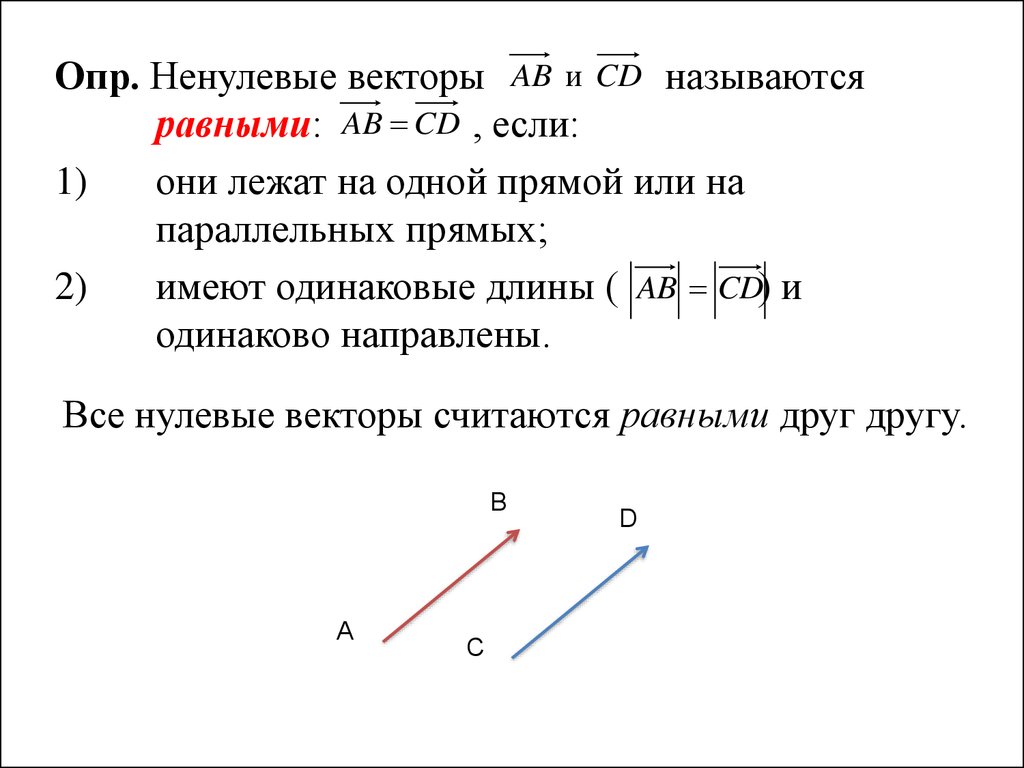
Опр. Ненулевые векторы AB и CD называютсяравными: AB CD , если:
1)
они лежат на одной прямой или на
параллельных прямых;
2)
имеют одинаковые длины ( AB CD) и
одинаково направлены.
Все нулевые векторы считаются равными друг другу.
B
A
C
D
5. Сложение векторов
• Пусть а и b - два произвольных вектора. Возьмемпроизвольную точку О и приложим вектор к этой точке,
получим а ОA.
• Затем отложим от точки А вектор b , получим
b АB .
а
ОB
Вектор
называется суммой векторов и b .
ОА AB OB
а
b
а
О
а
b
а
А
b
а b
b
b
с
B
Правило параллелограмма
Правило треугольника
с а b
6. 2. Разность векторов
Опр. Разность векторов а и b обозначается а bвектора
b.
определяется как сумма
противоположного вектора
а
а
b
О
А
b
с
с а b
B
а
и
и
7. 3. Умножение вектора на число
Опр. Произведение вектора а на число называется вектор,длина которого равна числу а
и который имеет
направление вектора а , если 0, и противоположное
направление ( а ), если 0.
Обозначается: а .
Если 0 или а 0 , то а 0 .
а
3а
2а
8.
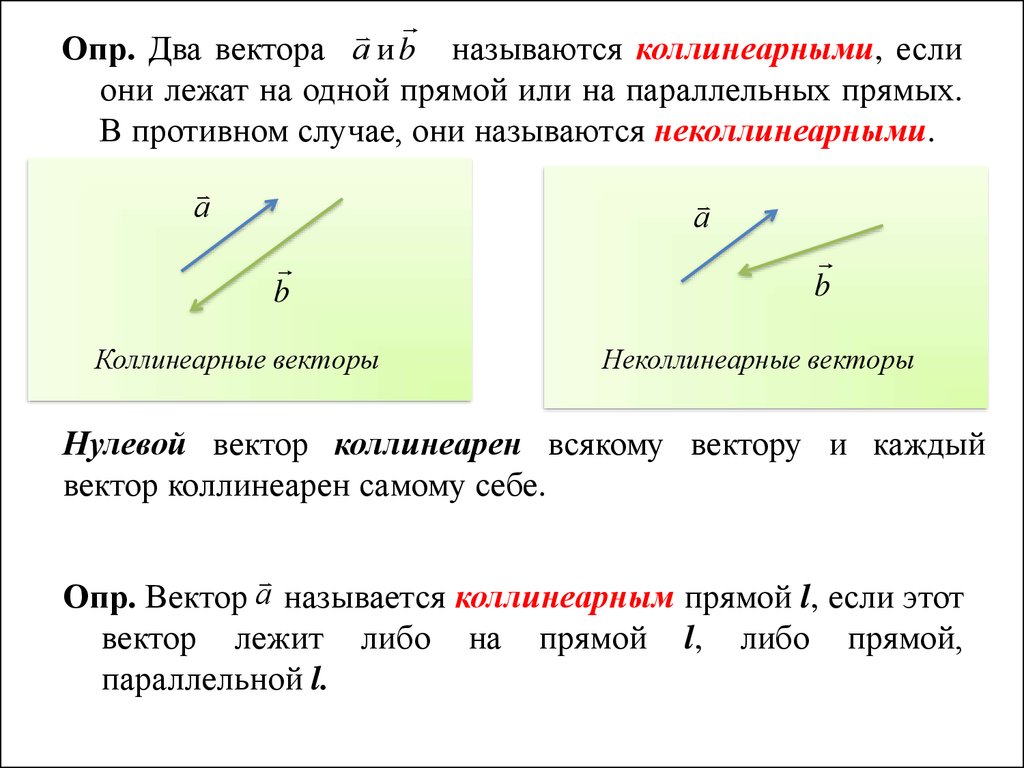
Опр. Два вектора а и b называются коллинеарными, еслиони лежат на одной прямой или на параллельных прямых.
В противном случае, они называются неколлинеарными.
а
а
b
b
Коллинеарные векторы
Неколлинеарные векторы
Нулевой вектор коллинеарен всякому вектору и каждый
вектор коллинеарен самому себе.
Опр. Вектор а называется коллинеарным прямой l, если этот
вектор лежит либо
параллельной l.
на
прямой
l,
либо
прямой,
9.
Первый признак коллинеарности двухненулевых векторов
(следует из определения)
a b a b , b a,
где и - некоторые числа.
10.
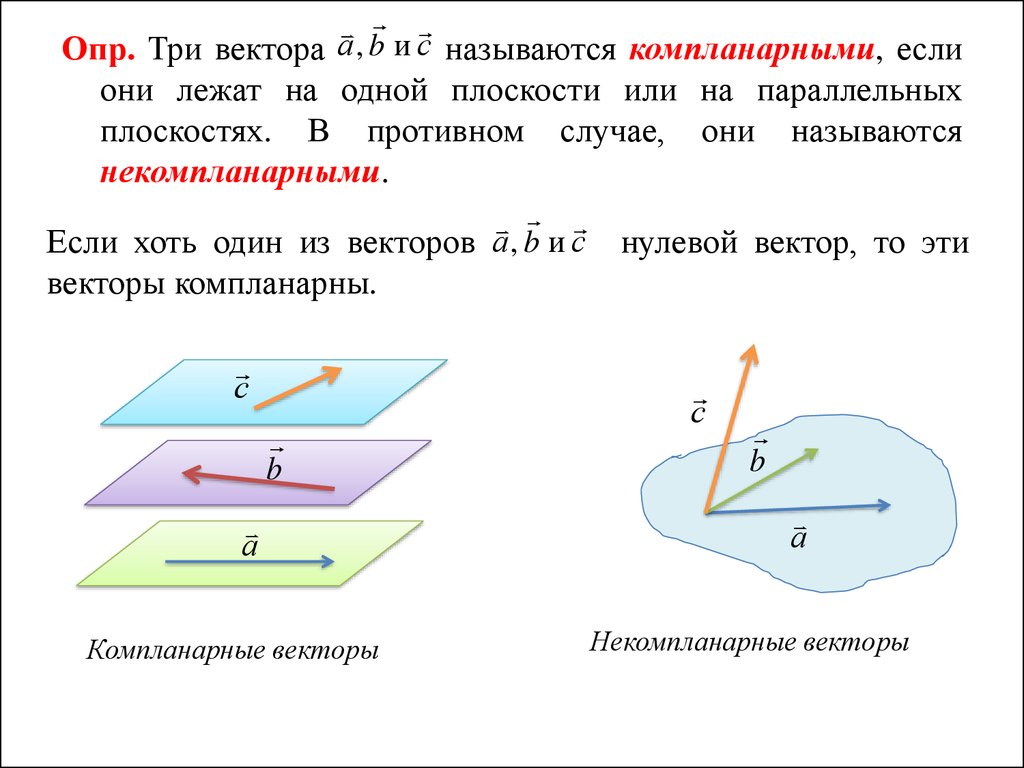
Опр. Три вектора а , b и с называются компланарными, еслиони лежат на одной плоскости или на параллельных
плоскостях. В противном случае, они называются
некомпланарными.
Если хоть один из векторов а , b и с
нулевой вектор, то эти
векторы компланарны.
с
b
а
Компланарные векторы
с
b
а
Некомпланарные векторы
11.
Множество всех свободных векторов на прямойбудем обозначать R1, на плоскости - R2, в
пространстве - R3.
Опр. Множества R1, R2, R3 вместе с введёнными
выше линейными операциями над векторами
называются
также
векторными
пространствами R1, R2, R3.
12.
Опр.1) Базисом в пространстве называются любые 3
некомпланарных вектора, взятые в определенном
порядке.
2) Базисом на плоскости называются любые 2
неколлинеарных вектора, взятые в определенном
порядке.
3)Базисом на прямой называется любой ненулевой
вектор.
13.
Опр. Если e1 , e2 , e3 - базис в пространстве и a e1 e2 e3 , точисла , и - называются компонентами или
координатами вектора в этом базисе.
В связи с этим можно записать следующие свойства:
1)
равные векторы имеют одинаковые координаты,
2)
при умножении вектора на число его компоненты тоже
умножаются на это число,
a ( e1 e2 e3 ) ( )e1 ( ) e2 ( ) e3
3)
при
сложении
векторов
соответствующие компоненты.
a 1 e1 2 e2 3 e3
складываются
b 1 e1 2 e2 3 e3
( 1 1 )e1 ( 2 2 )e2 ( 3 3 )e3
их
14.
Опр. Если a1 , a2 ,..., an- некоторая система векторовпространства R (R1, R2 или R3), тогда любой
вектор вида 1a1 2 a2 ... n an
называется
линейной комбинацией векторов
a1 , a2 ,..., an , где 1 , 2 ,..., п
некоторые действительные числа, называемые
коэффициентами линейной комбинации.
Если какой-либо вектор представляется в виде
линейной комбинации некоторых векторов, то
говорят, что он разложен по этим векторам.
15.
Опр.Векторы a1 ,..., an называются линейно
зависимыми, если существует такая
линейная комбинация 1 a1 2 a2 ... n an 0 ,
при не равных нулю одновременно i ,
т.е. 12 22 ... n2 0 .
Если же только при i = 0 выполняется
равенство 1 a1 2 a2 ... n an 0
, то
векторы
называются
линейно
независимыми.
16. Свойства
1. Если среди векторов есть нулевой вектор, то эти векторылинейно зависимы.
2. Если к системе линейно зависимых векторов добавить один
или несколько векторов, то полученная система тоже будет
линейно зависима.
3. Система векторов линейно зависима тогда и только тогда,
когда один из векторов раскладывается в линейную
комбинацию остальных векторов.
4. Любые 2 коллинеарных вектора линейно зависимы и,
наоборот, любые 2 линейно зависимые векторы
коллинеарны.
5. Любые 3 компланарных вектора линейно зависимы и,
наоборот, любые 3 линейно зависимые векторы
компланарны.
6. Любые 4 вектора линейно зависимы.
17. 2. Прямоугольная система координат
2. ПРЯМОУГОЛЬНАЯ СИСТЕМАКООРДИНАТ
18.
zy
k
j
i
O
x
i
j
O
x
• О – произвольная точка
• i , j i , j , k единичные взаимно-перпендикулярные векторы плоскости
(пространства) – орты
• Oxy – прямоугольная система координат на плоскости
• Oxyz – декартовая система координат в пространстве
• x – абсцисса
• y – ордината
• z – аппликата
y
19.
Вектор a заданный на плоскости Oxy,y
y1
j
O
A(x1, y1)
a
i
x1
x
может быть представлен в виде:
a x1i y1 j
где x1, y1 – проекции вектора на
соответствующие оси координат
называются прямоугольными
координатами вектора.
Вектор a OA с координатами x1 и y1 обозначается: a x1 , y1 и
называется радиус-вектором точки А.
20.
Задача 1. Найти координаты вектора, если даныкоординаты его начальной и конечной точек.
Решение.
Пусть А( x1 , y1 , z1 ) и B( x2 , y2 , z2 ). Имеем
AB OB OA.
Но OA x1 , y1 , z1 , OB x2 , y2 , z2 AB x2 x1 , y2 y1 , z2 z1 .
21. Условие коллинеарности двух векторов
a x1 , y1 , z1 и b x2 , y2 , z 2Векторы
коллинеарны тогда и только тогда, когда их
соответствующие координаты
пропорциональны, т.е. когда справедливо
равенство
x1 y1 z1
x2 y 2 z 2
22.
Длина вектораa x1, y1
в прямоугольных координатах :
2
2
a x1 y1
Длина вектора
a x1, y1, z1
в декартовых координатах:
a x12 y12 z12
23. Линейные операции над векторами в координатной форме
Еслиa x1 , y1 , z1 и b x2 , y2 , z 2
Тогда
a b x1 x2 ; y1 y2 ; z1 z 2
a x1 ; y1 ; z1
24.
Направление вектора определяется углами α, β, γ,образованными с осями координат Ox, Oy, Oz.
Косинусы этих углов определяются по формулам:
x1
cos
a
y1
cos
a
z1
cos
a
25. 3. Скалярное и векторное произведения векторов
3. СКАЛЯРНОЕ И ВЕКТОРНОЕПРОИЗВЕДЕНИЯ ВЕКТОРОВ
26.
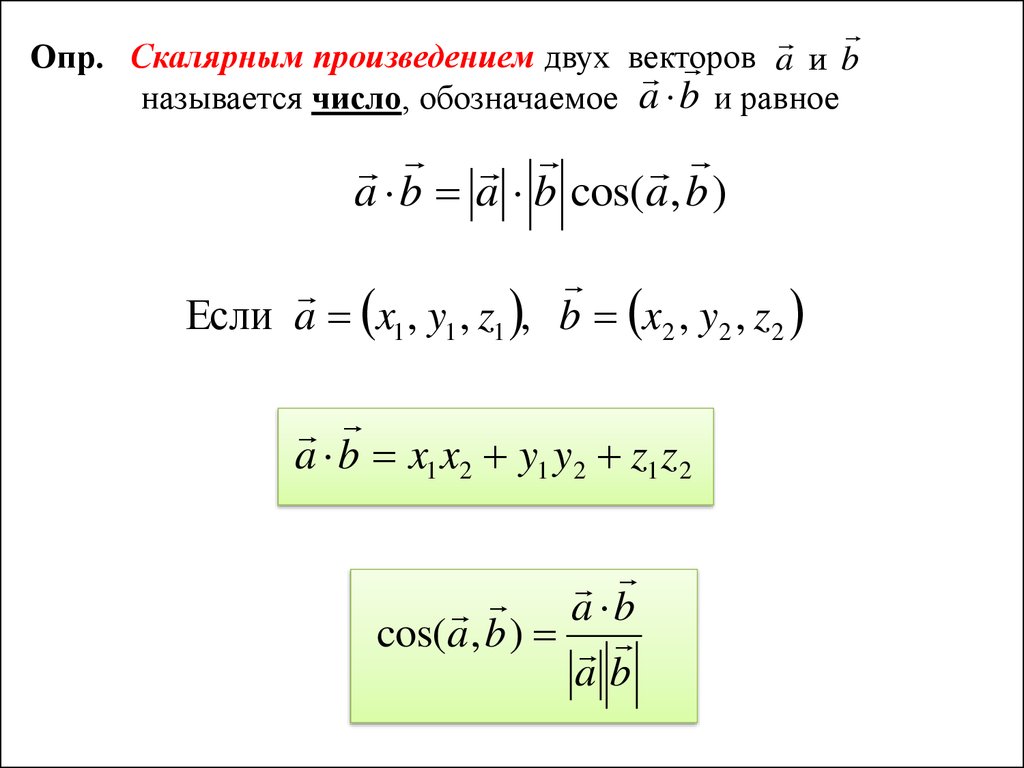
Опр. Скалярным произведением двух векторовa иb
называется число, обозначаемое a b и равное
a b a b cos( a, b )
Если a x1 , y1 , z1 , b x2 , y2 , z2
a b x1 x2 y1 y2 z1 z 2
a b
cos(a , b )
ab
27.
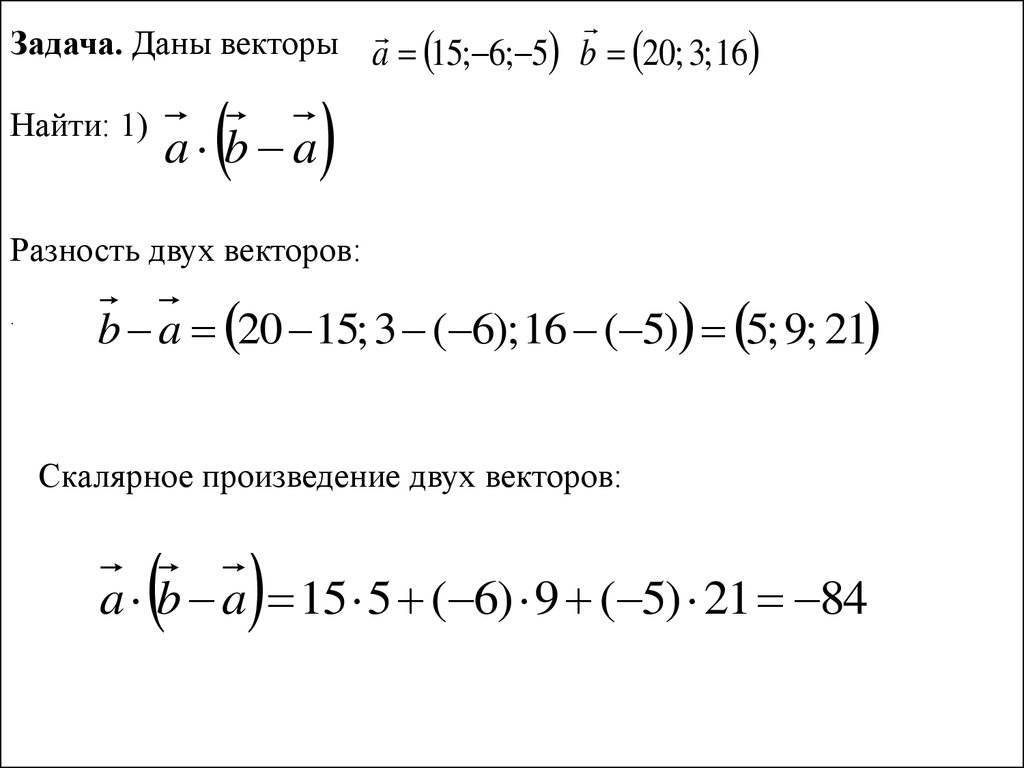
Задача. Даны векторы a 15; 6; 5 b 20; 3; 16Найти: 1)
a b a
Разность двух векторов:
.
b a 20 15; 3 ( 6); 16 ( 5) 5; 9; 21
Скалярное произведение двух векторов:
a b a 15 5 ( 6) 9 ( 5) 21 84
28.
Задача. Даны векторы a 15; 6; 5 b 20; 3; 16Найти: 2)
a
Длина вектора:
a 152 ( 6) 2 ( 5) 2 225 36 25 286
29.
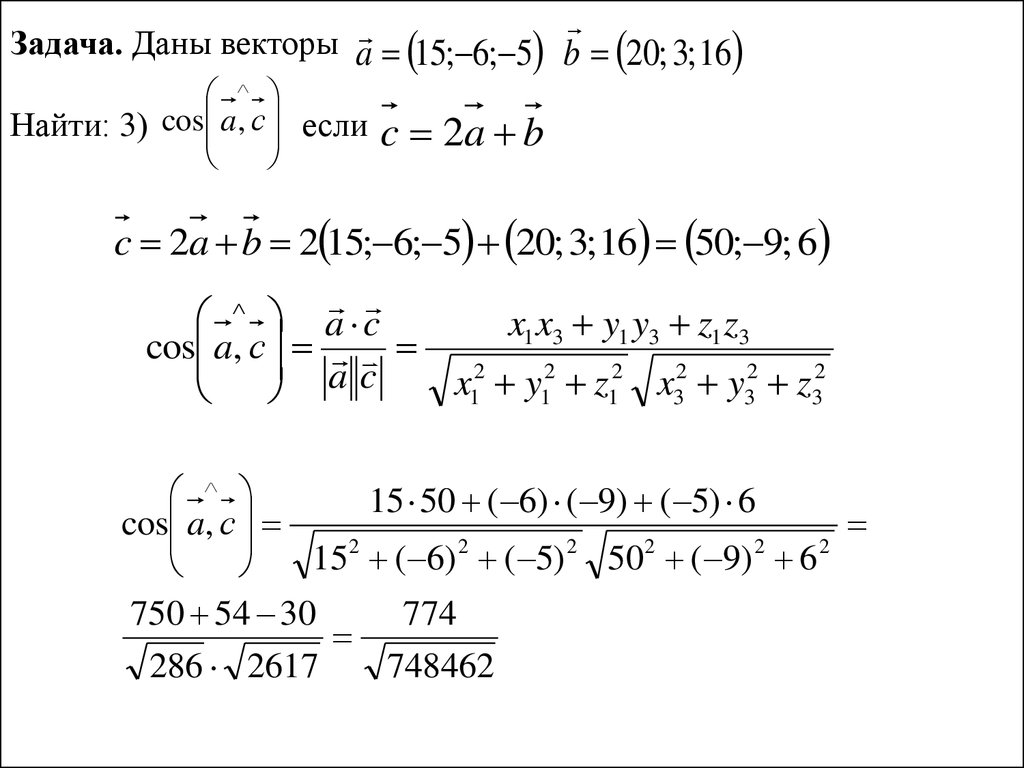
Задача. Даны векторы a 15; 6; 5 b 20; 3; 16Найти: 3) cos a, с если
c 2a b
c 2a b 2 15; 6; 5 20; 3; 16 50; 9; 6
a c
x1 x3 y1 y3 z1 z3
cos a, с
ac
2
2
2
2
2
2
x
y
z
x
y
z
1
1
1
3
3
3
15 50 ( 6) ( 9) ( 5) 6
cos a, с
2
2
2
2
2
2
15
(
6
)
(
5
)
50
(
9
)
6
750 54 30
774
286 2617
748462
30.
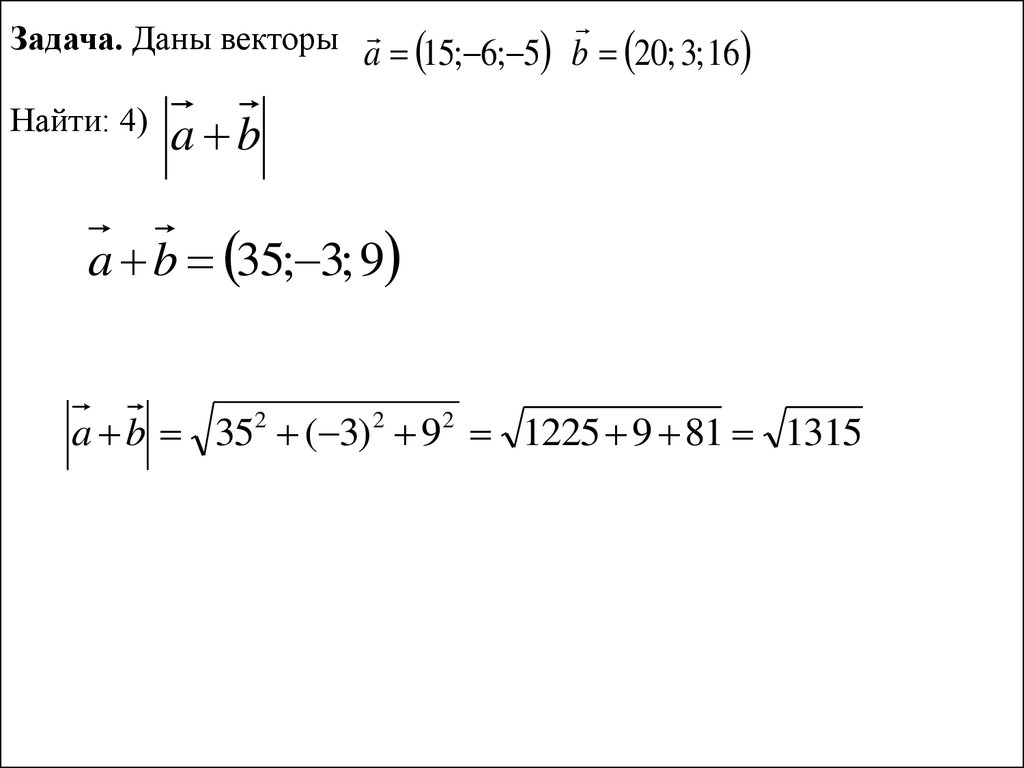
Задача. Даны векторы a 15; 6; 5 b 20; 3; 16Найти: 4)
a b
a b 35; 3; 9
a b 352 ( 3) 2 92 1225 9 81 1315
31.
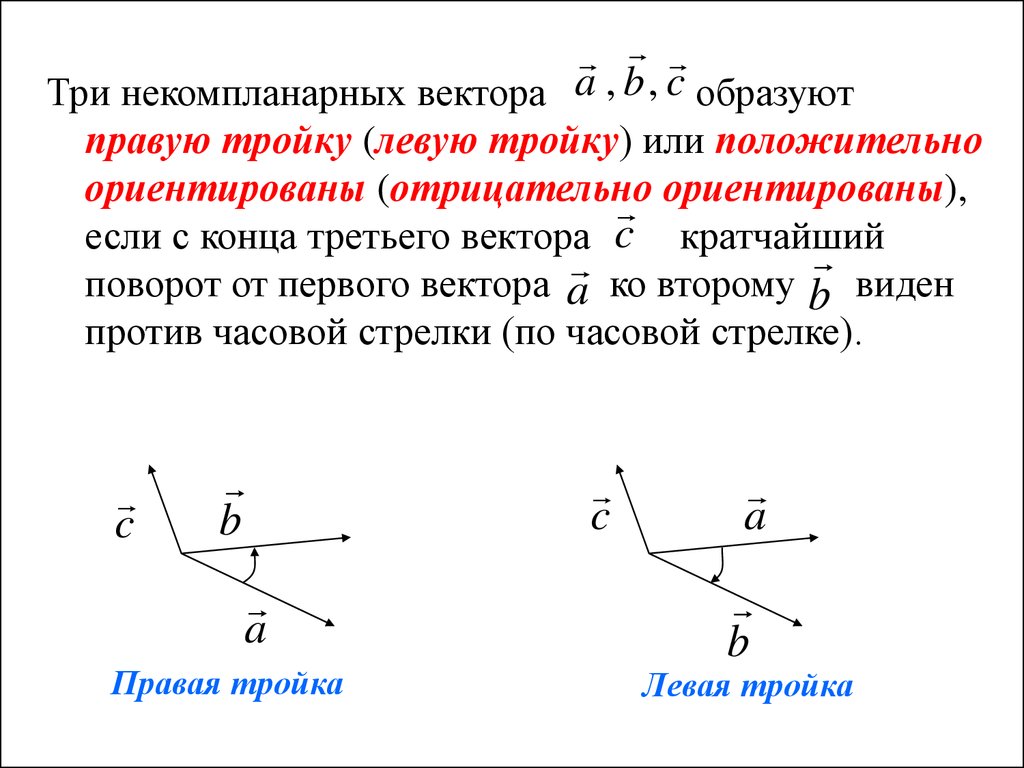
Три некомпланарных вектора a , b , c образуютправую тройку (левую тройку) или положительно
ориентированы (отрицательно
ориентированы),
если с конца третьего вектора c кратчайший
поворот от первого вектора a ко второму b виден
против часовой стрелки (по часовой стрелке).
c
b
a
Правая тройка
c
a
b
Левая тройка
32. Векторное произведение векторов
Опр. Векторным произведением двухвекторов a и b
называется такой третий вектор с , который
удовлетворяет следующим
трем
условиям:
1) вектор ортогонален c a и c b
2) с a b sin( a , b )
3) векторы
a , b , c образуют правую тройку.
33. Обозначения:
c a b или c [a , b ]c
b
a
34. Геометрический смысл
сb
h
S параллелогр.
а
2S треуг. Sпараллелогр. a b
35. Свойства
1.2.
3.
4.
a b (b a ),
a a 0,
a (b c ) a b a c ,
a b a b (a b )
5. Критерий коллинеарности векторов
a || b a b 0,
36. 6. Теорема (запись векторного произведения в координатах)
Еслиa x1 , y1 , z1 и b x2 , y2 , z 2
i
j k
c a b x1 y1 z1
x2 y 2 z 2
(псевдоопределитель)
37. Смешанное произведение векторов
Опр. Смешаннымпроизведением
трех
векторов a , b , c
называется
число,
обозначаемое a b c и определяемое
следующим образом
abc = (a × b) c
Другие обозначения :
(a , b, c ), a , b, c .
38. Геометрический смысл
a bcb
a
Vпарал. (a b ) c
39. Свойства
1.2.
3.
4.
( a b ) c a (b c )
a b c ( a b c )
aab ab b ab a 0
( a d )b c a b c db c
40.
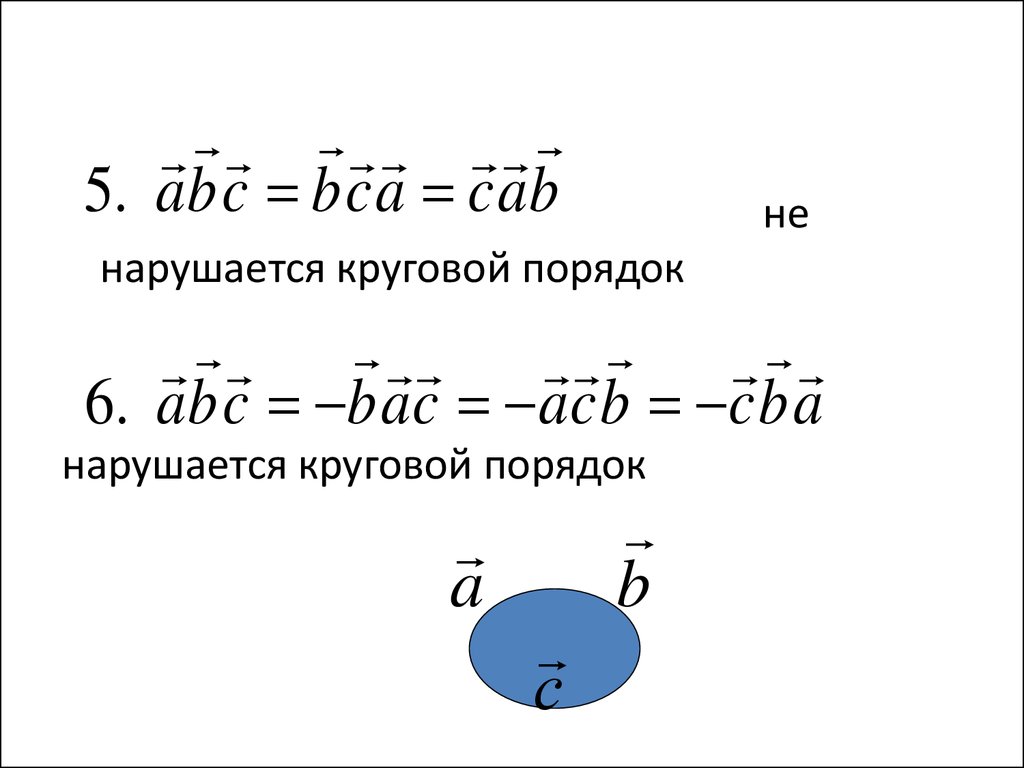
5. ab c b c a c abне
нарушается круговой порядок
6. ab c b ac ac b c b a
нарушается круговой порядок
a
с
b
41. 7. Теорема (запись смешанного произведения в координатах)
Еслиa x1 , y1 , z1 ,
b x2 , y2 , z 2 ,
c x3 , y3 , z3 ,
тогда
x1
a b c x2
y1
z1
y2
z2 .
x3
y3
z3
42. 8. Признак компланарности трех векторов (линейной зависимости трех векторов) Векторы компланарны (линейно зависимы)
8. Признак компланарности трех векторов(линейной зависимости трех векторов)
Векторы a , b , c компланарны
(линейно зависимы)
ab c 0
x1
y1
z1
x2
y2
z2 0
x3
y3
z3