
 Физика
ФизикаПохожие презентации:










Кинематика поступательного и вращательного движения
1.
КИНЕМАТИКА ПОСТУПАТЕЛЬНОГОИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
Путь и перемещение. Способы описания
движения.
Основные кинематические
характеристики: скорость и ускорение.
Описание криволинейного движения.
Кинематика вращательного движения,
угловая скорость и угловое ускорение.
Связь угловых и линейных
кинематических характеристик.
2.
КИНЕМАТИКАПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ
Цель кинематики - написать уравнение движения, позволяющее определить положение тела
в любой момент времени, не вдаваясь в
причины движения.
Система отсчета - тело отсчета, связанная с ней
система координат и часы для отсчета времени.
Материальная точка - макроскопическое тело,
размерами которого в условиях данной задачи
можно пренебречь.
Степени свободы i – число независимых координат, необходимых для однозначного определения
положения тела в пространстве.
Для материальной точки i = 3.
3.
КИНЕМАТИКАПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ
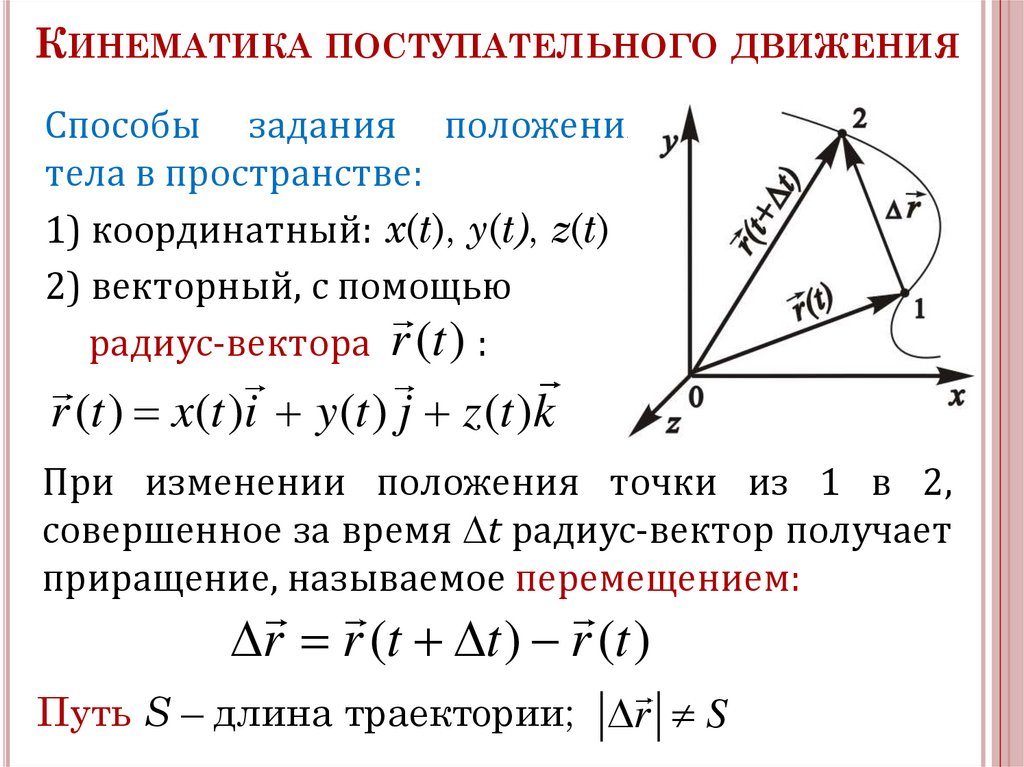
Способы задания положения
тела в пространстве:
1) координатный: x(t), y(t), z(t)
2) векторный, с помощью
радиус-вектора r (t ) :
r (t ) x(t )i y (t ) j z (t )k
При изменении положения точки из 1 в 2,
совершенное за время t радиус-вектор получает
приращение, называемое перемещением:
r r (t t ) r (t )
Путь S – длина траектории; r S
4.
КИНЕМАТИКАПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ
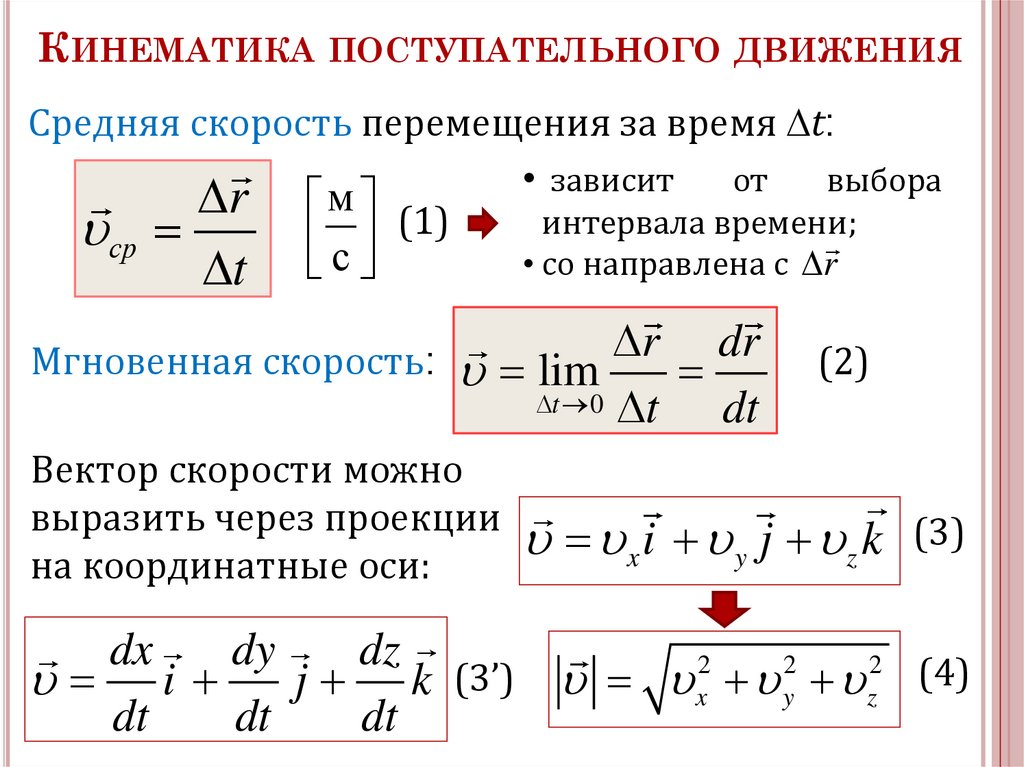
Средняя скорость перемещения за время t:
зависит
от
выбора
r м (1)
интервала времени;
ср
t
с
Мгновенная скорость:
• со направлена с r
r dr
lim
t 0 t
dt
Вектор скорости можно
выразить через проекции
на координатные оси:
(2)
xi y j z k
(3)
dx
dy
dz
i
j k (3’) x2 y2 z2 (4)
dt
dt
dt
5.
КИНЕМАТИКАПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ
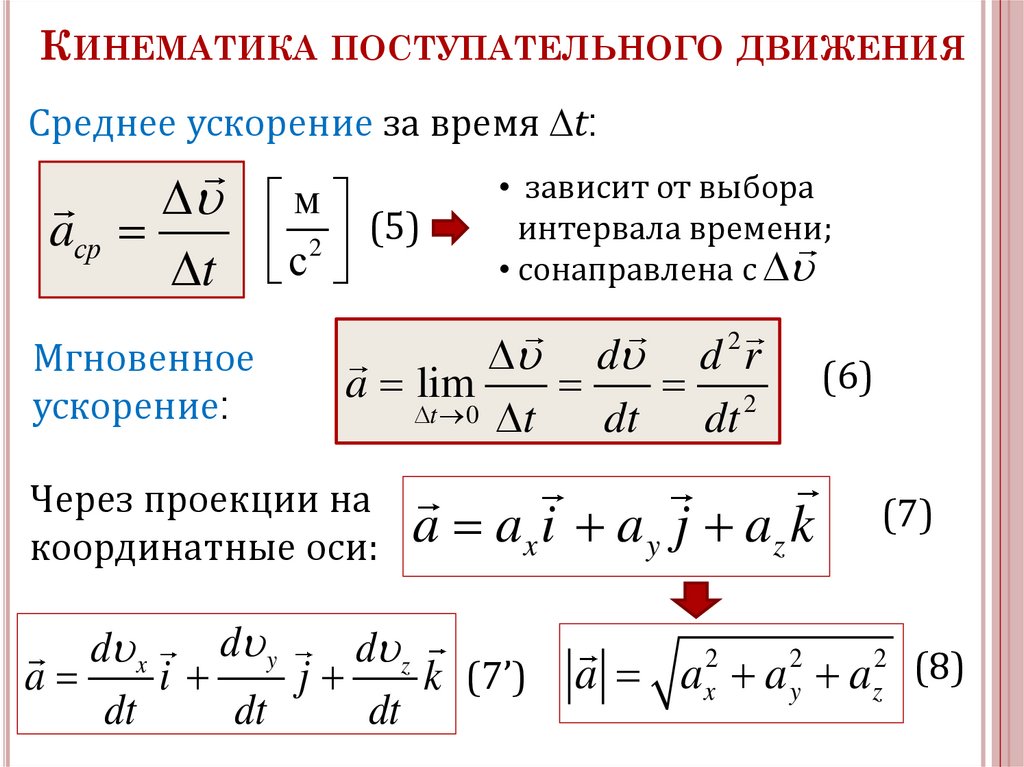
Среднее ускорение за время t:
м
aср
с2
t
Мгновенное
ускорение:
(5)
• зависит от выбора
интервала времени;
• сонаправлена с
d d 2 r
a lim
2
t 0 t
dt dt
Через проекции на
координатные оси:
a ax i a y j az k
d y
d x
d z
a
i
j
k (7’)
dt
dt
dt
(6)
(7)
a ax2 a y2 az2 (8)
6.
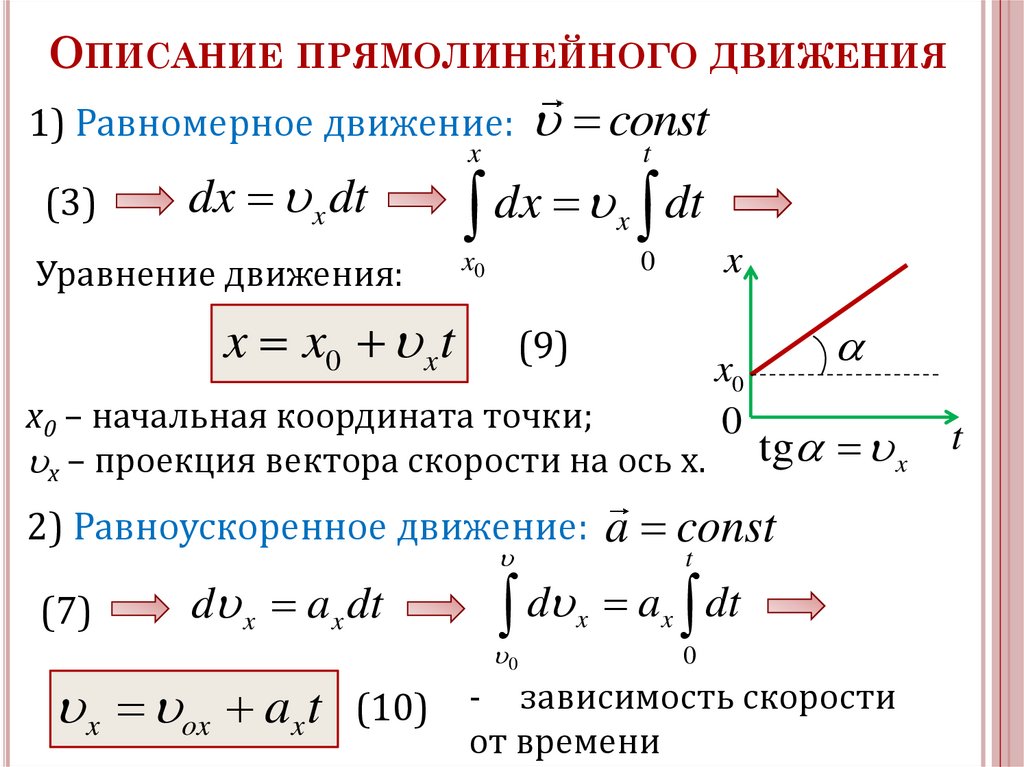
ОПИСАНИЕ ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ1) Равномерное движение:
const
dx x dt
x
(3)
Уравнение движения:
x
t
dx dt
x0
0
x x0 x t
(9)
х0 – начальная координата точки;
х – проекция вектора скорости на ось х.
2) Равноускоренное движение:
(7)
d x ax dt
x ox ax t
d
x
x0
0
tg x
a const
t
x
ax dt
0
0
(10) - зависимость скорости
от времени
t
7.
ОПИСАНИЕ ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯx
(3)
t
dx (
x0
ox
2
ax t
(11)
x xo ox t
2
ax t )dt
0
x
x0
x
x0
0 tg a t 0
x
(10) И (11)
t
найдем пройденный путь:
2
at
S o t
2
(12)
S
2
2a
2
0
(13)
a>0 – тело ускоряется; а<0 – тело замедляется.
8.
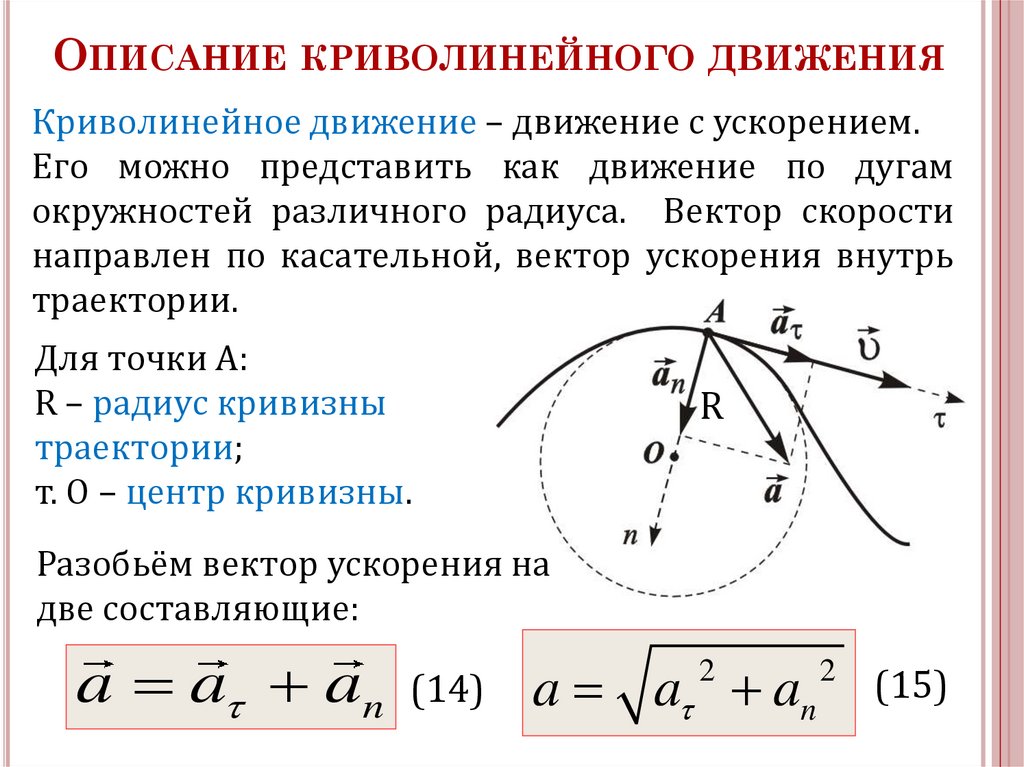
ОПИСАНИЕ КРИВОЛИНЕЙНОГО ДВИЖЕНИЯКриволинейное движение – движение с ускорением.
Его можно представить как движение по дугам
окружностей различного радиуса. Вектор скорости
направлен по касательной, вектор ускорения внутрь
траектории.
Для точки А:
R – радиус кривизны
траектории;
т. О – центр кривизны.
R
Разобьём вектор ускорения на
две составляющие:
a a an
(14)
a a an
2
2
(15)
9.
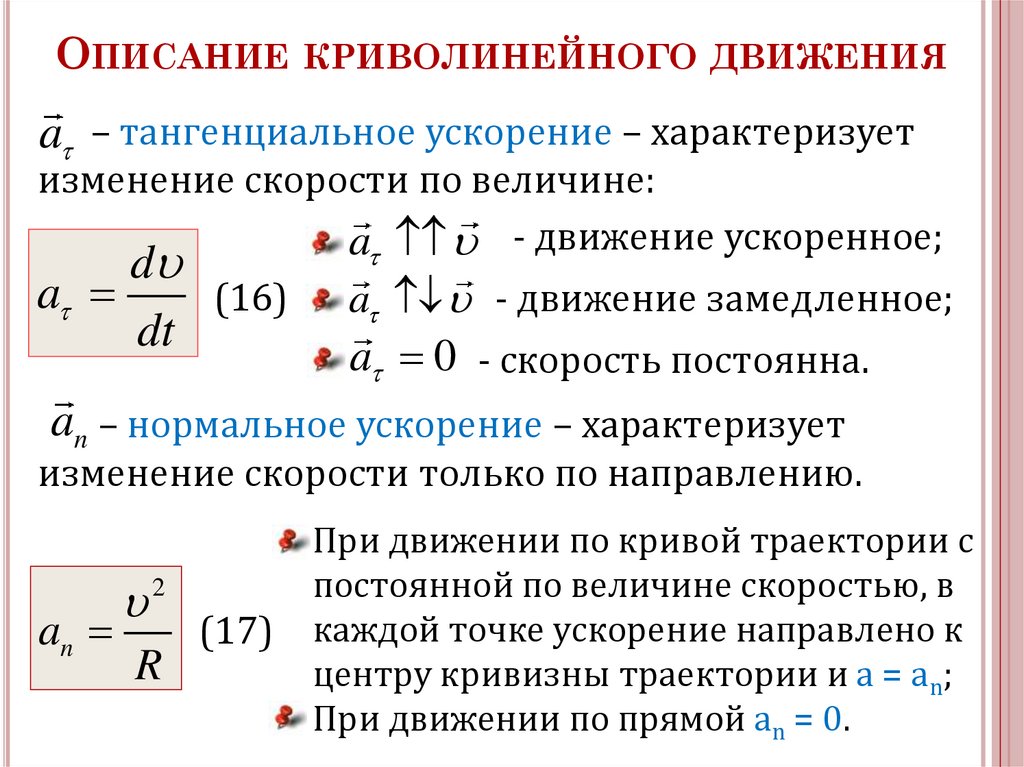
ОПИСАНИЕ КРИВОЛИНЕЙНОГО ДВИЖЕНИЯa – тангенциальное ускорение – характеризует
изменение скорости по величине:
• a - движение ускоренное;
d
a
(16) • a - движение замедленное;
dt
• a 0 - скорость постоянна.
an – нормальное ускорение – характеризует
изменение скорости только по направлению.
an
2
R
• При движении по кривой траектории с
постоянной по величине скоростью, в
(17) каждой точке ускорение направлено к
центру кривизны траектории и а = аn;
• При движении по прямой an = 0.
10.
КИНЕМАТИКА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯАбсолютно твердое тело – это тело, деформацией
которого при его движении в условиях данной
задачи можно пренебречь.
Два основных типа движения тел:
Поступательное
Вращательное
Линейные кинематические характеристики
(скорость и ускорение а) для различных точек
вращающегося тела отличаются друг от друга
Для описания вращательного движения тела
используют угловые величины: угловую скорость
и угловое ускорение.
11.
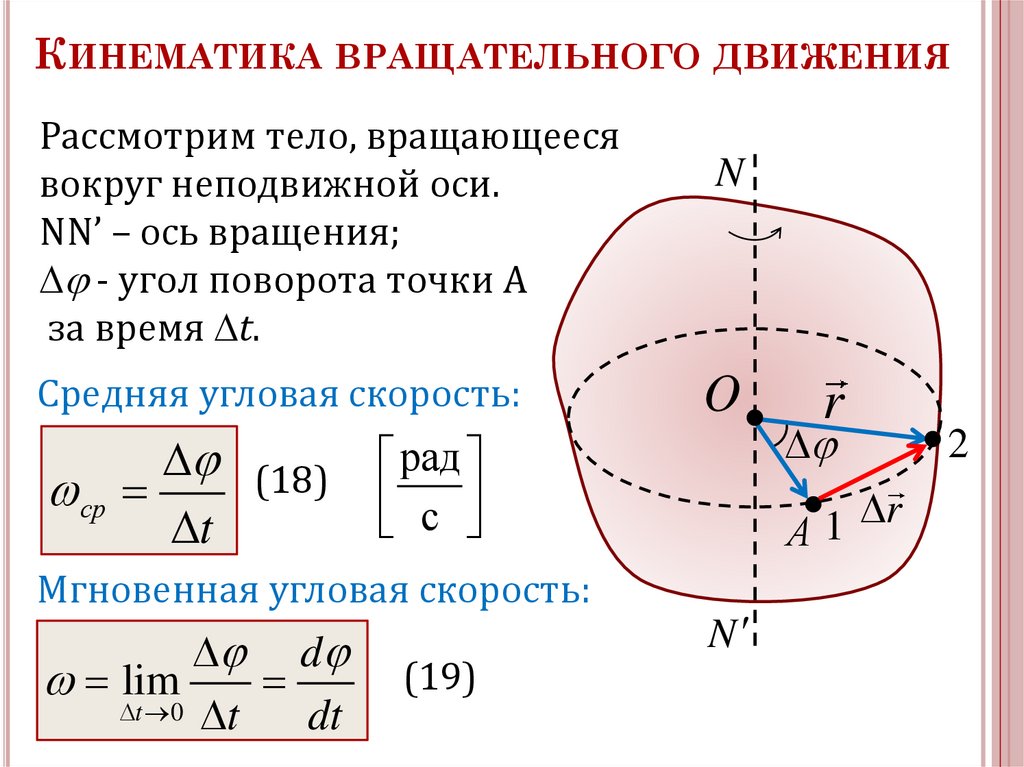
КИНЕМАТИКА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯРассмотрим тело, вращающееся
вокруг неподвижной оси.
NN’ – ось вращения;
- угол поворота точки А
за время t.
Средняя угловая скорость:
(18)
ср
t
O
рад
с
Мгновенная угловая скорость:
d
lim
t 0 t
dt
N
(19)
r
r
1
А
N
2
12.
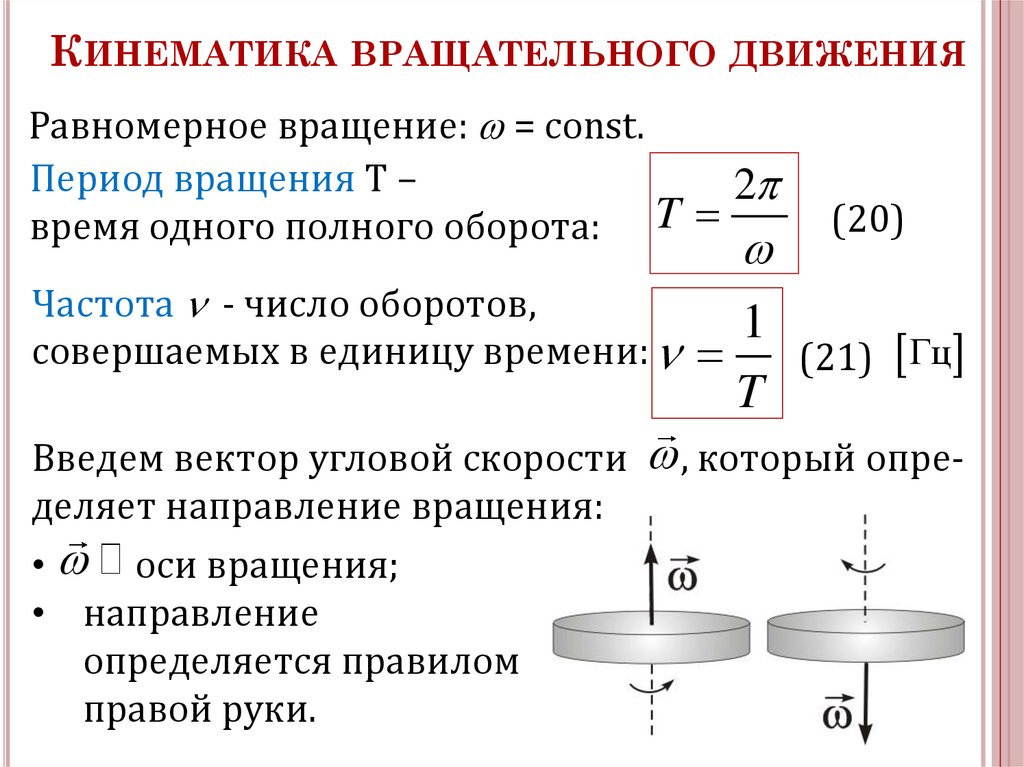
КИНЕМАТИКА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯРавномерное вращение: = const.
Период вращения Т –
2
время одного полного оборота: T
Частота - число оборотов,
совершаемых в единицу времени:
(20)
1
(21) Гц
T
Введем вектор угловой скорости , который определяет направление вращения:
• оси вращения;
• направление
определяется правилом
правой руки.
13.
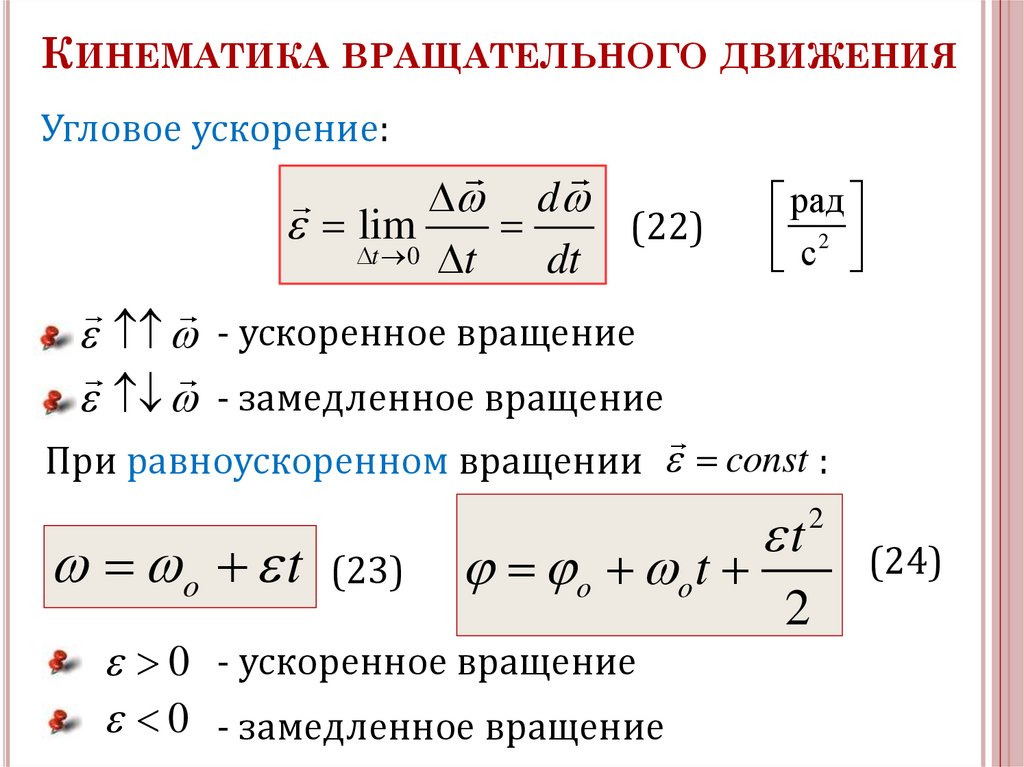
КИНЕМАТИКА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯУгловое ускорение:
d
lim
(22)
t 0 t
dt
рад
с2
• - ускоренное вращение
• - замедленное вращение
При равноускоренном вращении const :
o t
(23)
o o t
0 - ускоренное вращение
0 - замедленное вращение
t
2
2
(24)
14.
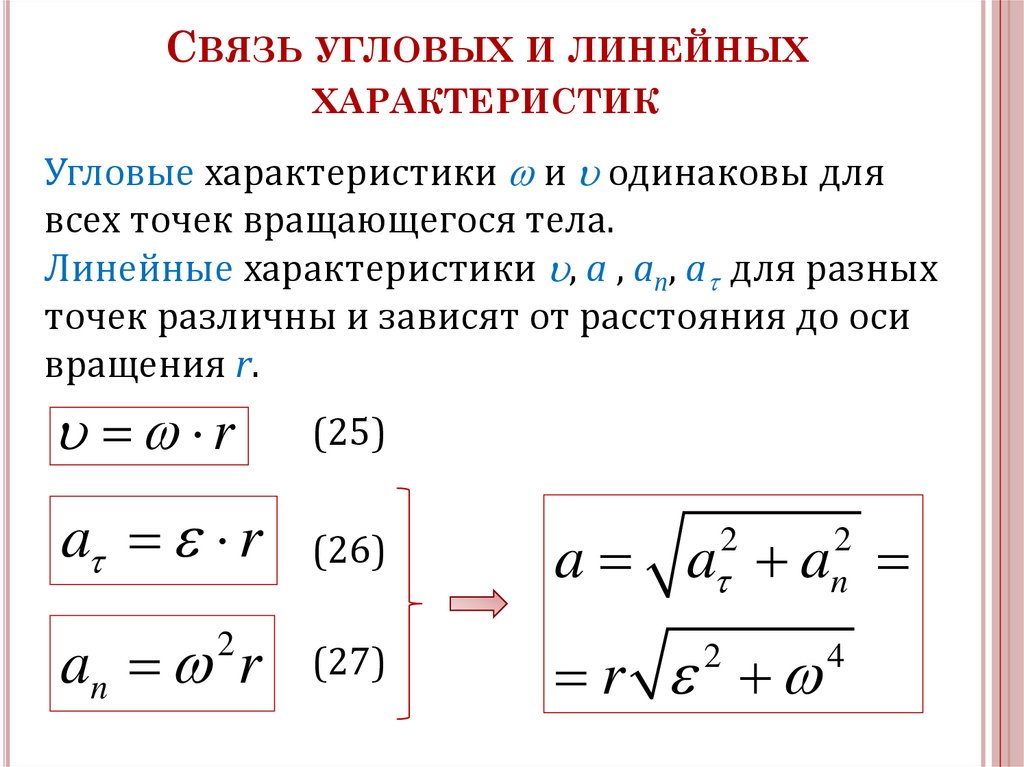
СВЯЗЬ УГЛОВЫХ И ЛИНЕЙНЫХХАРАКТЕРИСТИК
Угловые характеристики и одинаковы для
всех точек вращающегося тела.
Линейные характеристики , а , an, a для разных
точек различны и зависят от расстояния до оси
вращения r.
r
(25)
a r
(26)
a a a
an r
(27)
r
2
2
2
2
n
4