





 Физика
Физика Механика
МеханикаПохожие презентации:










Курсовая работа по теоретической механике “Динамика кулисного механизма”
1. Министерство образования и науки Российской Федерации Федеральное государственное автономное образовательное учреждение высшего профе
Министерство образования и науки Российской ФедерацииФедеральное государственное автономное образовательное учреждение высшего
профессионального образования
«Уральский федеральный университет имени первого Президента России
Б.Н.Ельцина»
Кафедра теоретической механики.
Курсовая работа
по теоретической механике
“Динамика кулисного механизма”
Вариант 2302014
Студент: Карпов Л.Д
Группа: ММ 230201
Преподаватель:
Соколовский Б.В
Екатеринбург 2014
2. Условие задачи
Кулисный механизм состоящий из маховика 1, кулисы 2 и катка 3, расположен
в горизонтальной плоскости и приводится в движение из состояния покоя
вращающим моментом Мд, создаваемым электродвигателем.
3. Определить:
1. Угловую скорость маховика при его повороте на угол ϕ =ϕ* .2. Угловое ускорение маховика при его повороте на угол ϕ = ϕ *.
3. Силу, приводящую в движение кулису в положении механизма, когда ϕ = ϕ * и
реакцию подшипника на оси маховика.
4. Силу, приложенную в центре катка и уравновешивающую механизм в положении,
когда ϕ = ϕ *.
Записать дифференциальное уравнение движения механизма, используя уравнение
Лагранжа второго рода и уравнение движения машины.
4. Этапы выполнения курсовой работы
• I этап. Кинематический анализ механизма.• Выполнение этапа базируется на теории вращательного движения
твердого тела, теории сложного движения точки, теории плоского
движения твердого тела.
• II этап. Определение угловой скорости и углового ускорения маховика.
• Базируется на теореме об изменении кинетической энергии в
интегральной и дифференциальной формах.
• III этап. Определение реакций связей и уравновешивающей силы.
• Базируется на принципе д’Аламбера для механической системы и
принципе возможных(виртуальных) перемещений.
• IV этап. Составление дифференциального уравнения движения
кулисного механизма.
• Базируется на применении уравнения Лагранжа II рода и уравнения
движения машины.
• V этап. Подготовка в Power Point презентации курсовой работы к
защите.
5. 1. Кинематический анализ механизма
• Найдем скорость точки А:VA OA 0,24
• Раскладываем скорость
точки А на две
составляющих
• Скорость точки С2:
VC 2 OA sin 0.12
•Ускорение поступательно
движущейся кулисы равно
производной от её
скорости:
aC 2 VC 2 OA sin 2 OA sin 0.12 0,12 2
Скорость центра катка находим из условия пропорциональности скоростей его
точек расстояниям до мгновенного центра скоростей vC 3
2
•Ускорение центра катка находим
дифференцированием скорости центра катка:
aC 3
R2 OA sin R2 2OA sin
VC 3
0.068 0, 068 2
R2 r3
R2 r3
vC 2
vC 3
R
R2 r3
OA sin R2
R2 r3
0.068 рад / c
6.
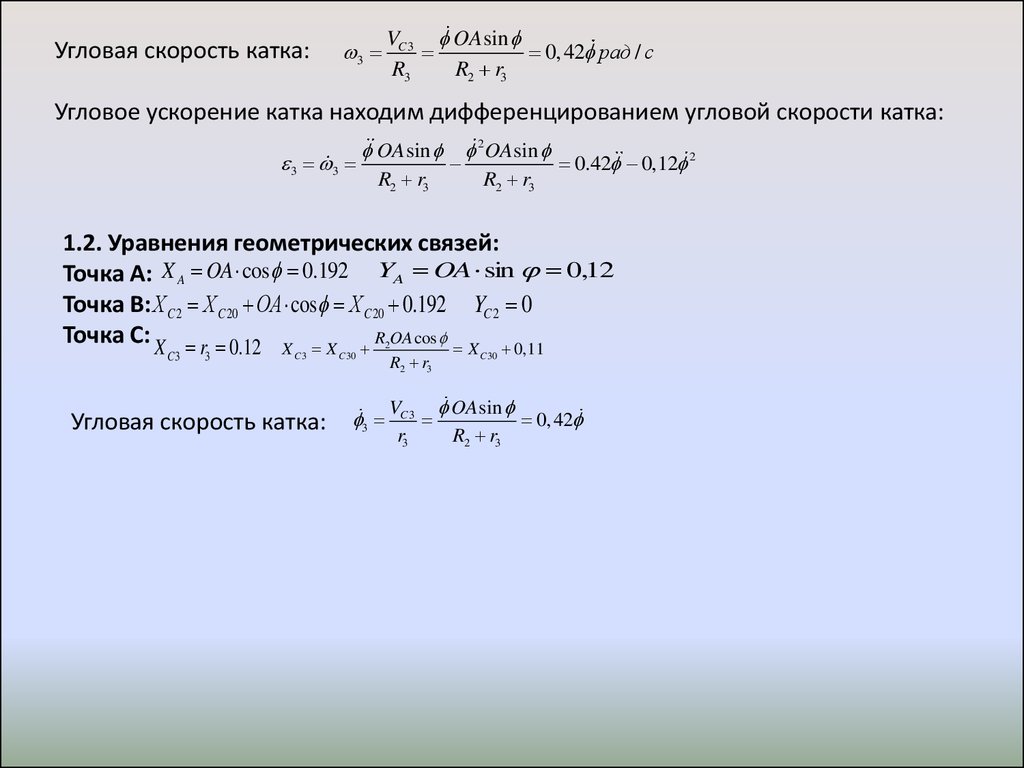
Угловая скорость катка:3
VC 3 OA sin
0, 42 рад / с
R3
R2 r3
Угловое ускорение катка находим дифференцированием угловой скорости катка:
3 3
OA sin 2OA sin
R2 r3
R2 r3
0.42 0,12 2
1.2. Уравнения геометрических связей:
Точка А: X A OA cos 0.192 YA OA sin 0,12
Точка В: Х C 2 Х C 20 OА cos Х C 20 0.192 YC 2 0
Точка С: X r 0.12 X X R OA cos X 0,11
2
C3
3
C3
Угловая скорость катка:
C 30
3
R2 r3
C 30
VC 3 OA sin
0, 42
r3
R2 r3
7.
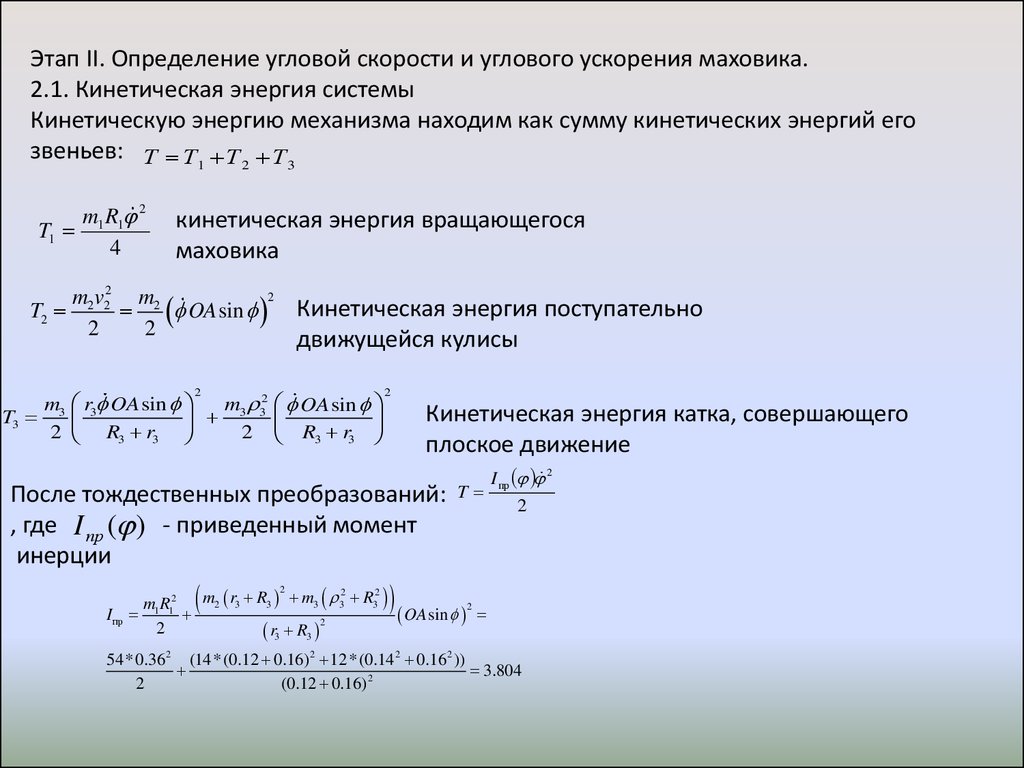
Этап II. Определение угловой скорости и углового ускорения маховика.2.1. Кинетическая энергия системы
Кинетическую энергию механизма находим как сумму кинетических энергий его
звеньев: Т Т1 Т 2 Т 3
m1 R1 2
T1
4
кинетическая энергия вращающегося
маховика
m2v22 m2
T2
OA sin
2
2
2
2
m3 r3 OA sin
m3 32
T3
2 R3 r3
2
Кинетическая энергия поступательно
движущейся кулисы
OA sin
R3 r3
2
Кинетическая энергия катка, совершающего
плоское движение
После тождественных преобразований:
, где I пр ( ) - приведенный момент
инерции
T
I пр 2
2
m2 r3 R3 m3 32 R32
m1 R12
2
I пр
OA sin
2
2
r3 R3
2
54*0.362 (14*(0.12 0.16) 2 12*(0.14 2 0.16 2 ))
3.804
2
(0.12 0.16) 2
8.
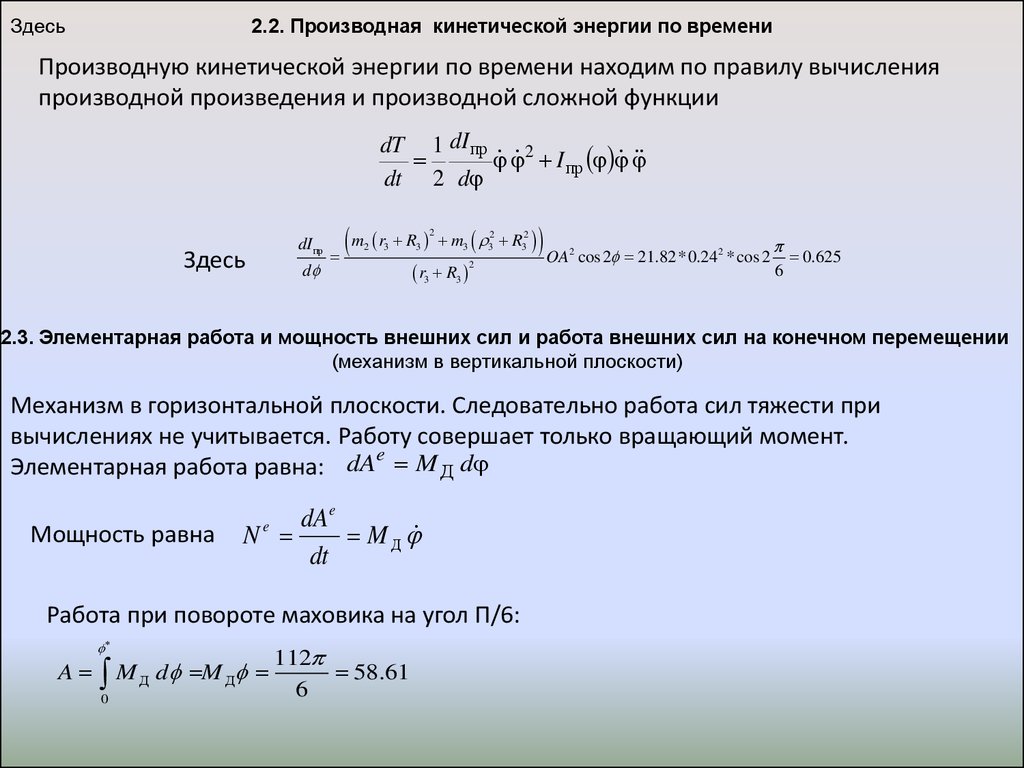
Здесь2.2. Производная кинетической энергии по времени
Производную кинетической энергии по времени находим по правилу вычисления
производной произведения и производной сложной функции
dT 1 dI пр
2 I пр
dt 2 d
dI пр
Здесь
d
m r R
2
3
3
2
m3 32 R32
r3 R3
2
OA cos 2 21.82*0.24 *cos 2 0.625
2
2
6
2.3. Элементарная работа и мощность внешних сил и работа внешних сил на конечном перемещении
(механизм в вертикальной плоскости)
Механизм в горизонтальной плоскости. Следовательно работа сил тяжести при
вычислениях не учитывается. Работу совершает только вращающий момент.
e
Элементарная работа равна: dA M Д d
Мощность равна
dAe
N
M Д
dt
e
Работа при повороте маховика на угол П/6:
A
M Д d M Д
0
112
58.61
6
9.
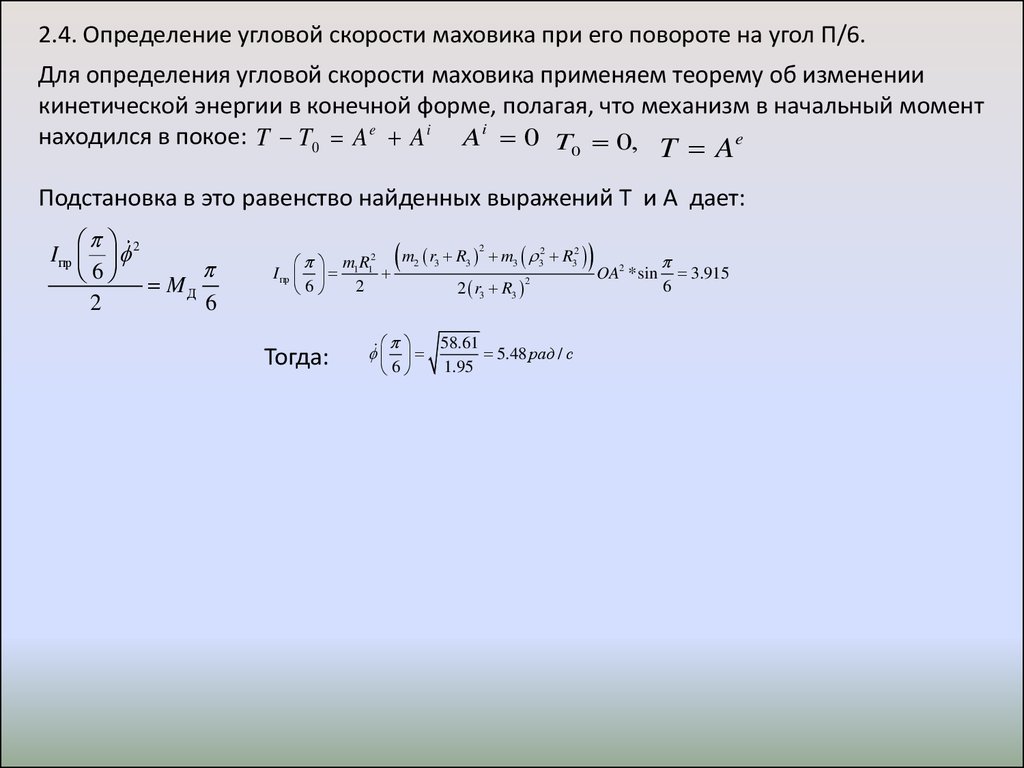
2.4. Определение угловой скорости маховика при его повороте на угол П/6.Для определения угловой скорости маховика применяем теорему об изменении
кинетической энергии в конечной форме, полагая, что механизм в начальный момент
находился в покое: T T0 A e A i A i 0 T0 0,
T Ae
Подстановка в это равенство найденных выражений Т и А дает:
I пр 2
6 M
Д
2
6
2
m2 r3 R3 m3 32 R32
m1 R1
I пр
OA2 *sin 3.915
2
2
6
6
2 r3 R3
Тогда:
2
58.61
5.48 рад / с
6
1.95
10.
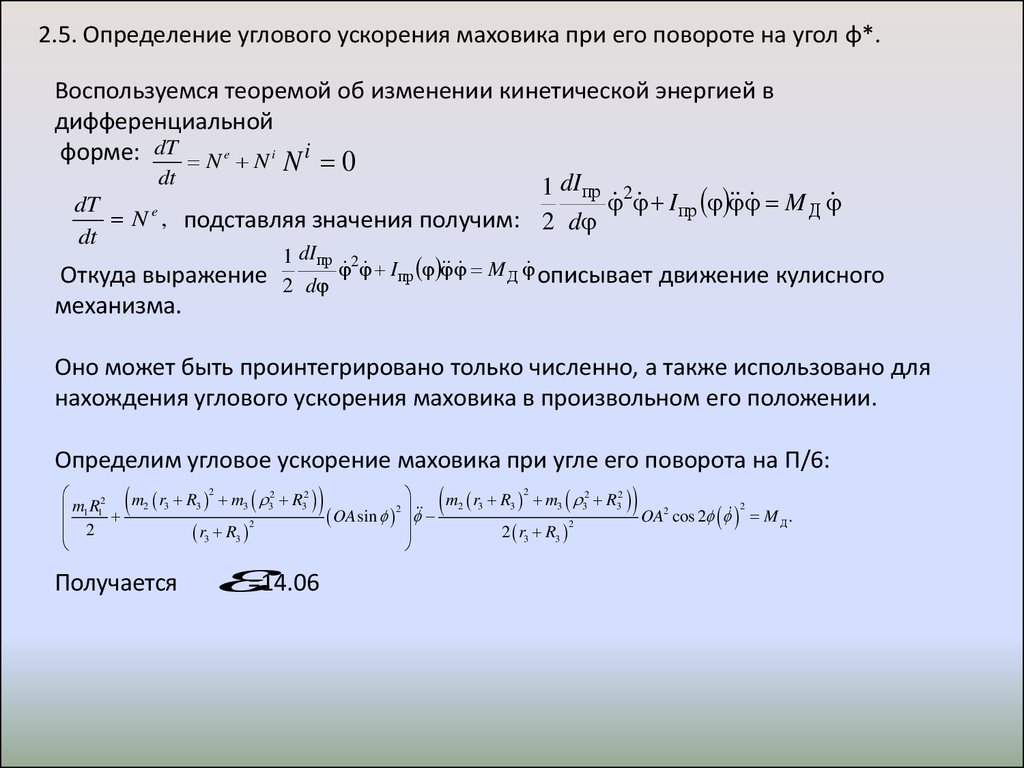
2.5. Определение углового ускорения маховика при его повороте на угол φ*.Воспользуемся теоремой об изменении кинетической энергией в
дифференциальной
форме: dT N e N i N i 0
dt
1 dI пр 2
M Д
I пр
dT
N e , подставляя значения получим: 2 d
dt
Откуда выражение
механизма.
1 dI пр 2
M Д описывает движение кулисного
I пр
2 d
Оно может быть проинтегрировано только численно, а также использовано для
нахождения углового ускорения маховика в произвольном его положении.
Определим угловое ускорение маховика при угле его поворота на П/6:
2
2
2
m2 r3 R3 m3 32 R32
m2 r3 R3 m3 32 R32
m
R
2
1 1
OA2 cos 2
OA sin
2
2
2
2 r3 R3
r3 R3
Получается
=14.06
2
MД.
11. Этап III. Определение сил.
3.1. Определение реакций внешних и внутренних связейв положении φ*.
Определим реакцию подшипника на оси маховика и силу, приводящую в движение кулису с
помощью принципа Даламбера, рассматривая движение маховика отдельно от других тел
системы.
Маховик совершает вращательное движении. Внешними силами, помимо пары сил с
моментом, на него действуют реакция подшипника и реакция кулисы (рис.3). Система сил
инерции приводится к паре с моментом, направленным против вращения.
Условие уравновешенности плоской системы внешних сил:
Fkx 0 :
XO NA,
Fky 0 :
Y0 0,
mO Fk 0 : M Д M N A x A 0;
M MД
Находим N A OA sin 30 474.6 H
N A 474.6Н ,
X O 474.6,
YO 0.
; При угле 6
12.
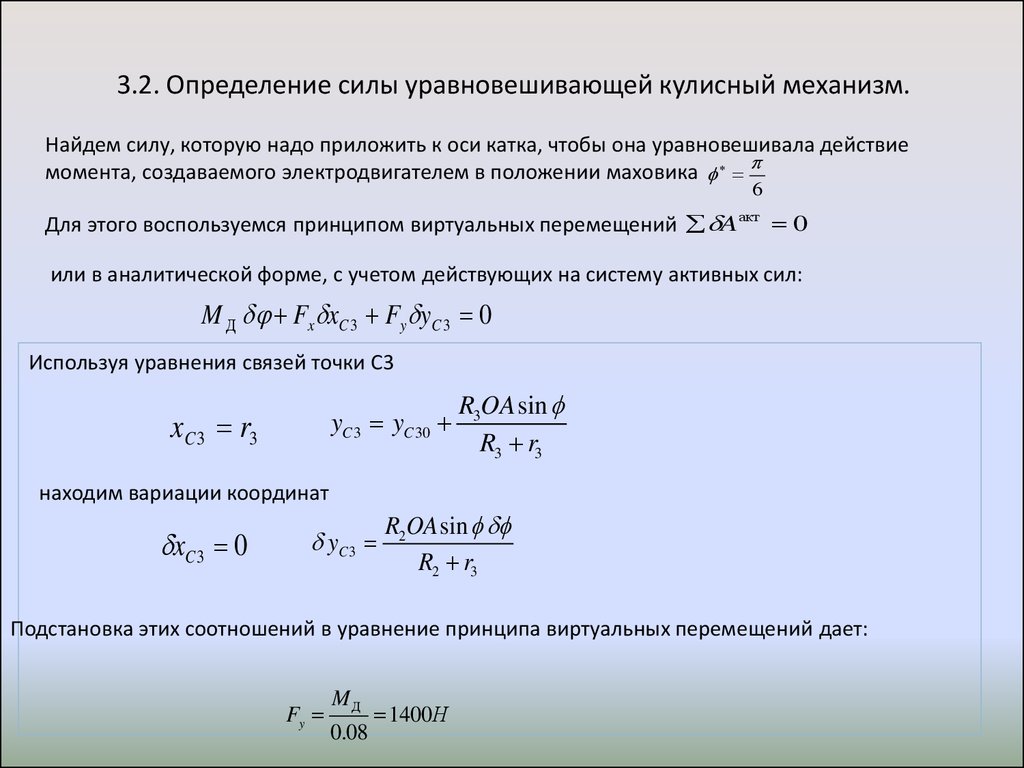
3.2. Определение силы уравновешивающей кулисный механизм.Найдем силу, которую надо приложить к оси катка, чтобы она уравновешивала действие
момента, создаваемого электродвигателем в положении маховика
6
Для этого воспользуемся принципом виртуальных перемещений Aакт 0
или в аналитической форме, с учетом действующих на систему активных сил:
M Д Fx xC 3 Fy yC 3 0
Используя уравнения связей точки С3
yC 3 yC 30
xC 3 r3
R3OA sin
R3 r3
находим вариации координат
xC 3 0
yC 3
R2OA sin
R2 r3
Подстановка этих соотношений в уравнение принципа виртуальных перемещений дает:
Fy
MД
0.08
1400 Н
13.
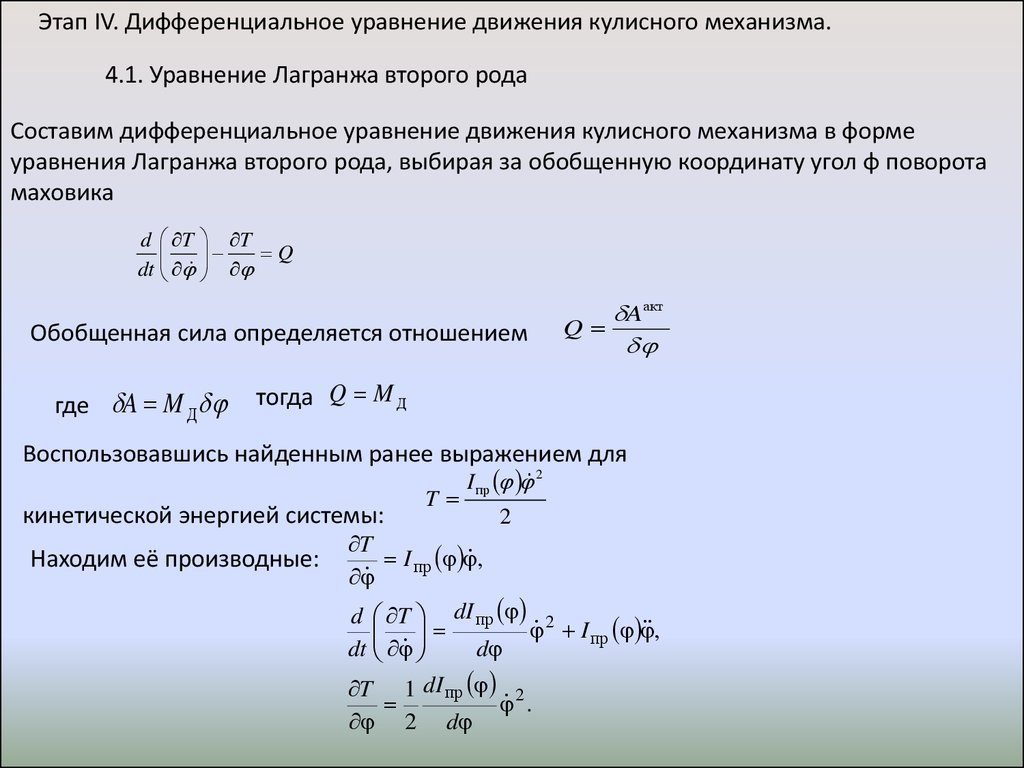
Этап IV. Дифференциальное уравнение движения кулисного механизма.4.1. Уравнение Лагранжа второго рода
Составим дифференциальное уравнение движения кулисного механизма в форме
уравнения Лагранжа второго рода, выбирая за обобщенную координату угол φ поворота
маховика
d T T
Q
dt
Обобщенная сила определяется отношением
где A M Д
A акт
Q
тогда Q M Д
Воспользовавшись найденным ранее выражением для
кинетической энергией системы:
Находим её производные:
T
I пр 2
T
I пр ,
2
d T dI пр 2
,
I пр
dt
d
T 1 dI пр 2
.
2 d
14.
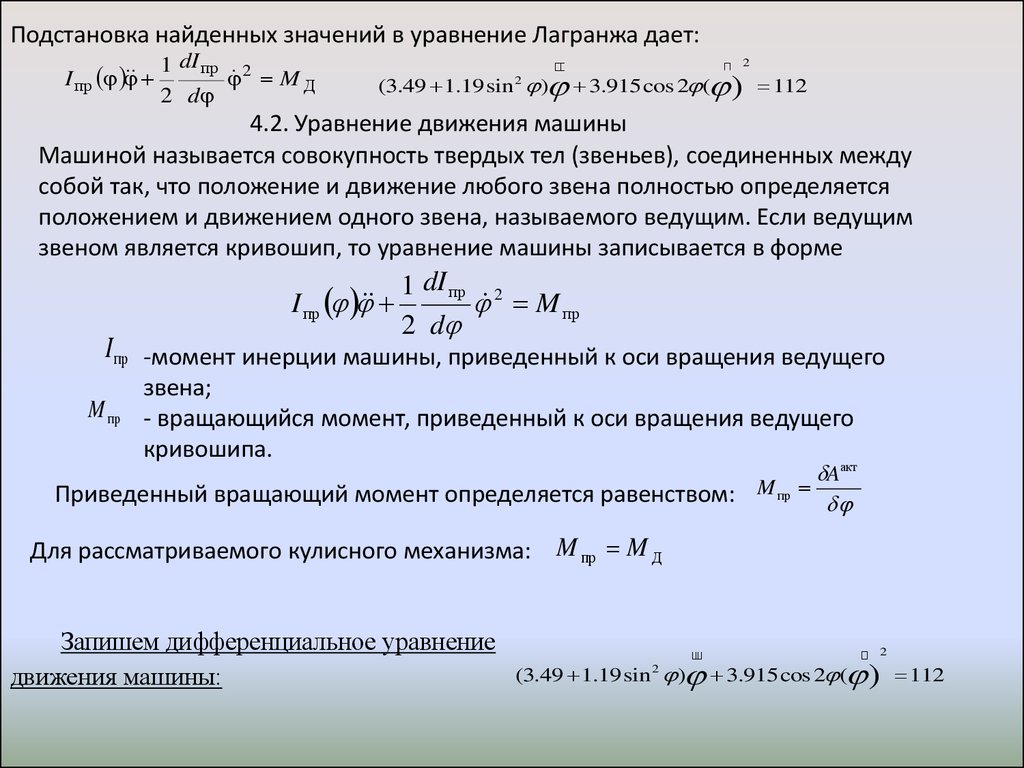
Подстановка найденных значений в уравнение Лагранжа дает:1
I пр
dI пр
2 d
2 MД
2
3.915cos 2 ( )
(3.49 1.19sin )
2
112
4.2. Уравнение движения машины
Машиной называется совокупность твердых тел (звеньев), соединенных между
собой так, что положение и движение любого звена полностью определяется
положением и движением одного звена, называемого ведущим. Если ведущим
звеном является кривошип, то уравнение машины записывается в форме
1 dI пр 2
I пр
M пр
2 d
I пр -момент инерции машины, приведенный к оси вращения ведущего
M пр
звена;
- вращающийся момент, приведенный к оси вращения ведущего
кривошипа.
Приведенный вращающий момент определяется равенством: M пр
Aакт
Для рассматриваемого кулисного механизма: M пр M Д
Запишем дифференциальное уравнение
движения машины:
2
3.915cos 2 ( )
(3.49 1.19sin )
2
112