Похожие презентации:










Диагностирование динамических систем авиационного оборудования по критерию
1.
6.6. Диагностирование динамических системавиационного оборудования по критерию
2
2.
Структура алгоритма (6.4)-(6.9) позволяет организовать поканальный контрольдинамической системы. При этом каждому каналу контроля будет соответствовать
свой элемент вектора наблюдений. Для реализации такого контроля необходимо
при каждом обращении к блоку коррекции оценок (6.14)-(6.19) дополнительно
формировать и анализировать диагностический параметр. Таким параметром
может быть квадратичная форма (6.8) для скалярной невязки.
2j 2j / j
где невязка
и (6.15).
j
и ее дисперсия
(6.20)
j
определяются по формулам (6.14)
Параметр j представляет собой квадрат нормированной невязки. Для него по
аналогии с обобщенным параметром (6.8) при может быть сформировано необходимое
условие правильного функционирования ОК по каждому из каналов наблюдений, а именно:
(6.21)
2
2
2
j (1, 2)
или по правилу
3
2j 12 M [ 2j ] 3 D[ 2j ] 1 3 2 5.2
(3.22)
3.
С учетом допускапоканальный контроль динамических систем АО по
12
2
критерию
сводится к проверке следующих условий:
если 2j 12 , то в ОК по j му каналу наблюдений нет нарушений;
2
2
если j 1 , то в ОК по j му каналу наблюдений есть нарушения.
(6.23)
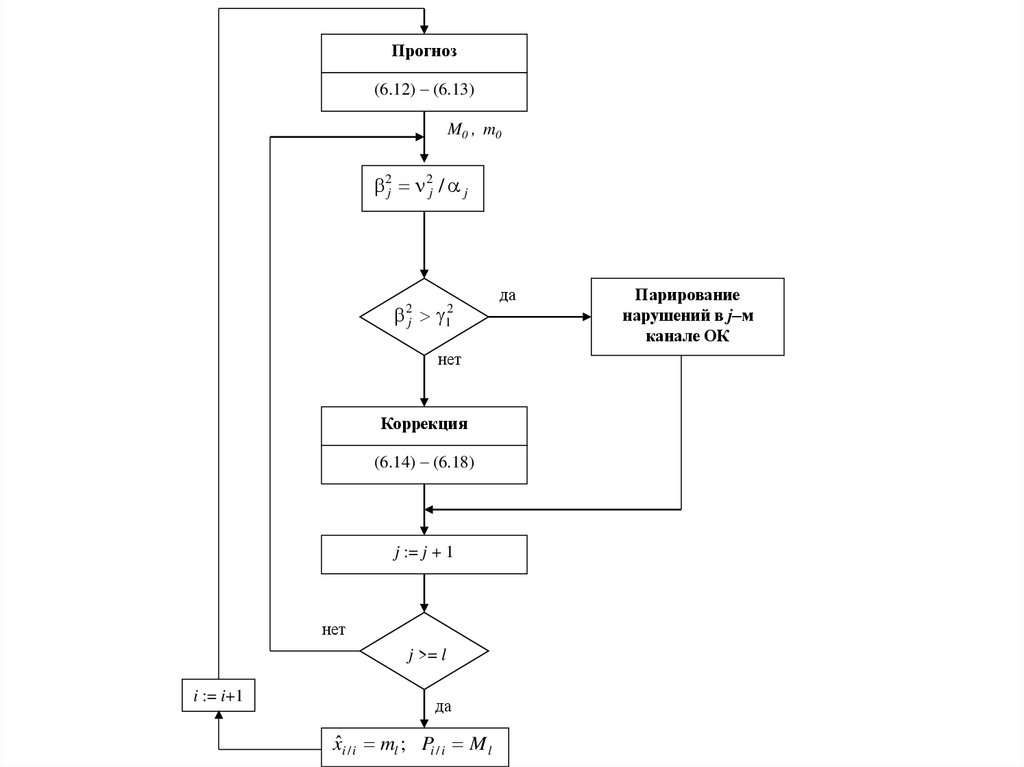
Процедура (6.23) может быть включена в алгоритм последовательной
обработки наблюдений за состоянием ОК (6.14)-(6.19). Структура системы
поканального контроля динамических объектов АО по критерию может быть
представлена следующей схемой
4.
Прогноз(6.12) – (6.13)
M0 , m0
2j 2j / j
2j
12
нет
Коррекция
(6.14) – (6.18)
j := j + 1
нет
j >= l
i := i+1
да
xˆi / i ml ; Pi / i M l
да
Парирование
нарушений в j–м
канале ОК