



 Физика
ФизикаПохожие презентации:







")
")

Построение моделей динамических звеньев САУ (лекция 4)
1.
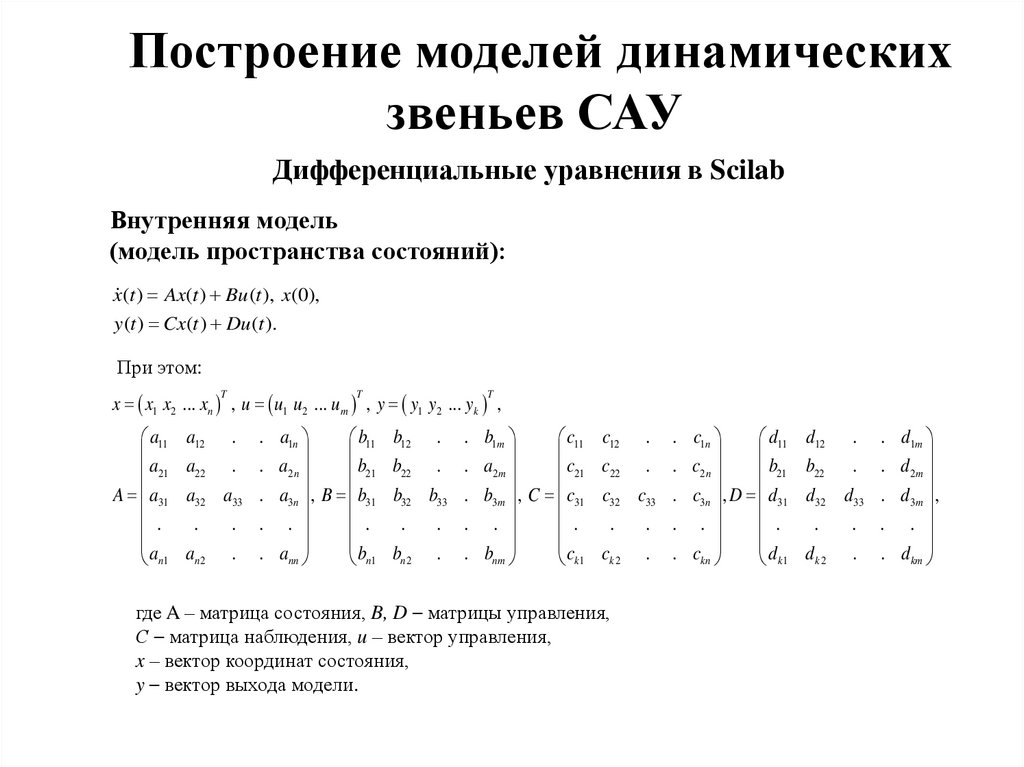
Построение моделей динамическихзвеньев САУ
Дифференциальные уравнения в Scilab
Внутренняя модель
(модель пространства состояний):
x(t ) Ax(t ) Bu (t ), x(0),
y (t ) Cx(t ) Du (t ).
При этом:
x x1 x2 ... xn , u u1 u2 ... um , y y1 y2 ... yk ,
T
a11
a
21
A a31
.
a
n1
a12 .
a22 .
a32 a33
.
.
an 2 .
T
.
.
.
.
.
a1n
b11
b
a2 n
21
a3n , B b31
.
.
b
ann
n1
T
b12 .
b22 .
b32 b33
.
.
bn 2 .
.
.
.
.
.
b1m
c11
c
a2 m
21
b3m , C c31
.
.
c
bnm
k1
c12 .
c22 .
c32 c33
.
.
ck 2 .
где A – матрица состояния, B, D – матрицы управления,
С – матрица наблюдения, u – вектор управления,
x – вектор координат состояния,
y – вектор выхода модели.
.
.
.
.
.
c1n
d11
b
c2 n
21
c3n , D d31
.
.
d
ckn
k1
d12 .
b22 .
d32 d33
.
.
dk 2 .
.
.
.
.
.
d1m
d 2 m
d3m ,
.
d km
2.
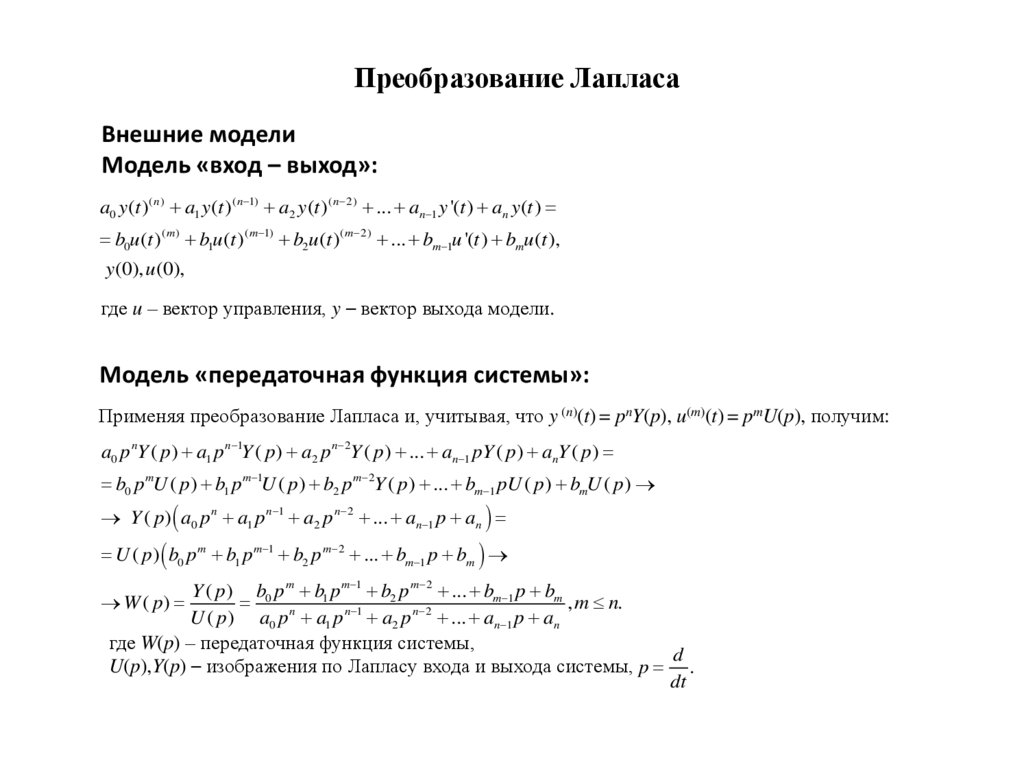
Преобразование ЛапласаВнешние модели
Модель «вход – выход»:
a0 y (t )( n ) a1 y (t )( n 1) a2 y (t )( n 2) ... an 1 y '(t ) an y (t )
b0u (t )( m ) b1u (t )( m 1) b2u (t )( m 2) ... bm 1u '(t ) bmu (t ),
y (0), u (0),
где u – вектор управления, y – вектор выхода модели.
Модель «передаточная функция системы»:
Применяя преобразование Лапласа и, учитывая, что y (n)(t) = pnY(p), u(m)(t) = pmU(p), получим:
a0 p nY ( p ) a1 p n 1Y ( p ) a2 p n 2Y ( p ) ... an 1 pY ( p ) anY ( p )
b0 p mU ( p ) b1 p m 1U ( p ) b2 p m 2Y ( p ) ... bm 1 pU ( p ) bmU ( p )
Y ( p) a0 p n a1 p n 1 a2 p n 2 ... an 1 p an
U ( p ) b0 p m b1 p m 1 b2 p m 2 ... bm 1 p bm
Y ( p ) b0 p m b1 p m 1 b2 p m 2 ... bm 1 p bm
, m n.
U ( p ) a0 p n a1 p n 1 a2 p n 2 ... an 1 p an
где W(p) – передаточная функция системы,
d
U(p),Y(p) – изображения по Лапласу входа и выхода системы, p .
dt
W ( p)
3.
Примеры моделей систем управленияМодель управления движением тележки
Fc
m
a, v F
///////////////////////////////////////////
a , v – вектор ускорения и скорости тележки,
Fc – вектор силы сопротивления движению,
F – вектор силы управления движением,
m – масса тележки.
ma (t ) Fc (t ) F (t ) mv '(t ) kv(t ) F (t ) ms ''(t ) ks '(t ) F (t ),
где s – перемещение тележки, k – коэффициент сопротивления движению, Fc kv.
Выполним замену s=y, F=u получим внешнюю модель системы в виде дифференциального уравнения:
my ''(t ) ky '(t ) u (t ),
Применим преобразование Лапласа и, учитывая, что y ‘’(t) = p2Y(p), u (t) =U(p),
получим передаточную функцию:
mp 2Y ( p ) kpY ( p ) U ( p ) Y ( p ) mp 2 kp U ( p )
W ( p)
Y ( p)
1
.
2
U ( p ) mp kp
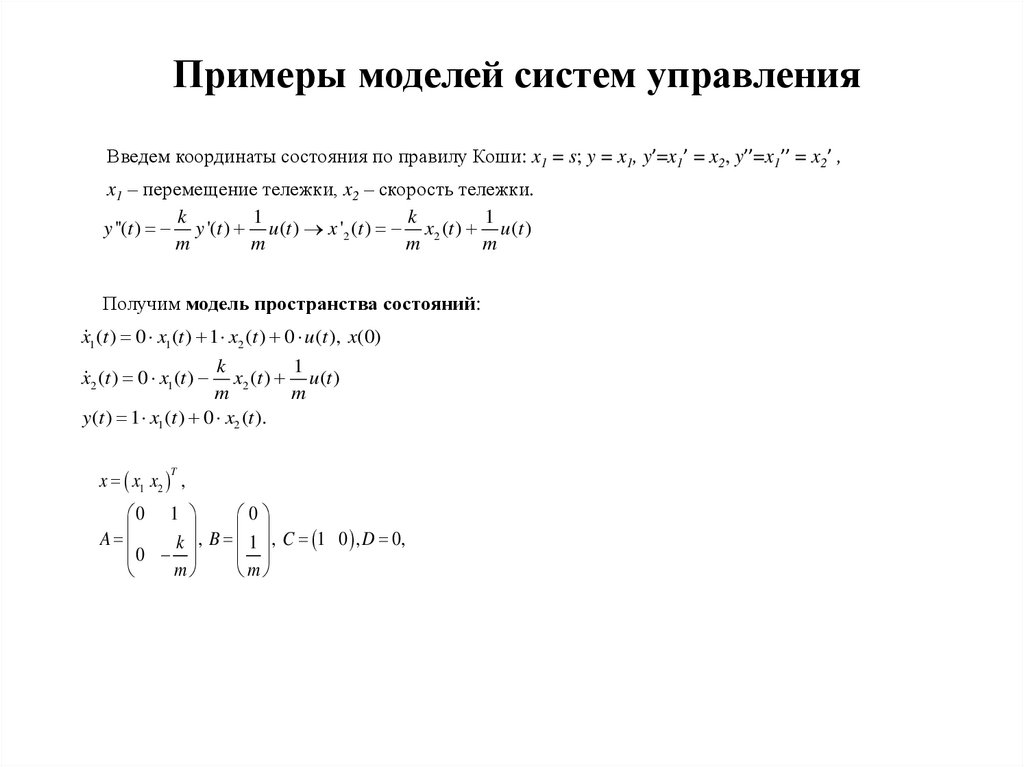
4.
Примеры моделей систем управленияВведем координаты состояния по правилу Коши: x1 = s; y = x1, y’=x1’ = x2, y’’=x1’’ = x2’ ,
x1 – перемещение тележки, x2 – скорость тележки.
k
1
k
1
y ''(t ) y '(t ) u (t ) x '2 (t ) x2 (t ) u (t )
m
m
m
m
Получим модель пространства состояний:
x1 (t ) 0 x1 (t ) 1 x2 (t ) 0 u (t ), x(0)
k
1
x2 (t ) u (t )
m
m
y (t ) 1 x1 (t ) 0 x2 (t ).
x2 (t ) 0 x1 (t )
x x1 x2 ,
T
0 1
0
A
, B 1 , C 1 0 , D 0,
0 k
m
m
5.
Примеры моделей систем управления в ScilabПри k=0,5 н·с/м; m = 5 кг, u = 3 н
Внутренняя модель системы управления:
Результат моделирования (перемещение тележки):
Вкладка «Моделирование» → «Установка»:
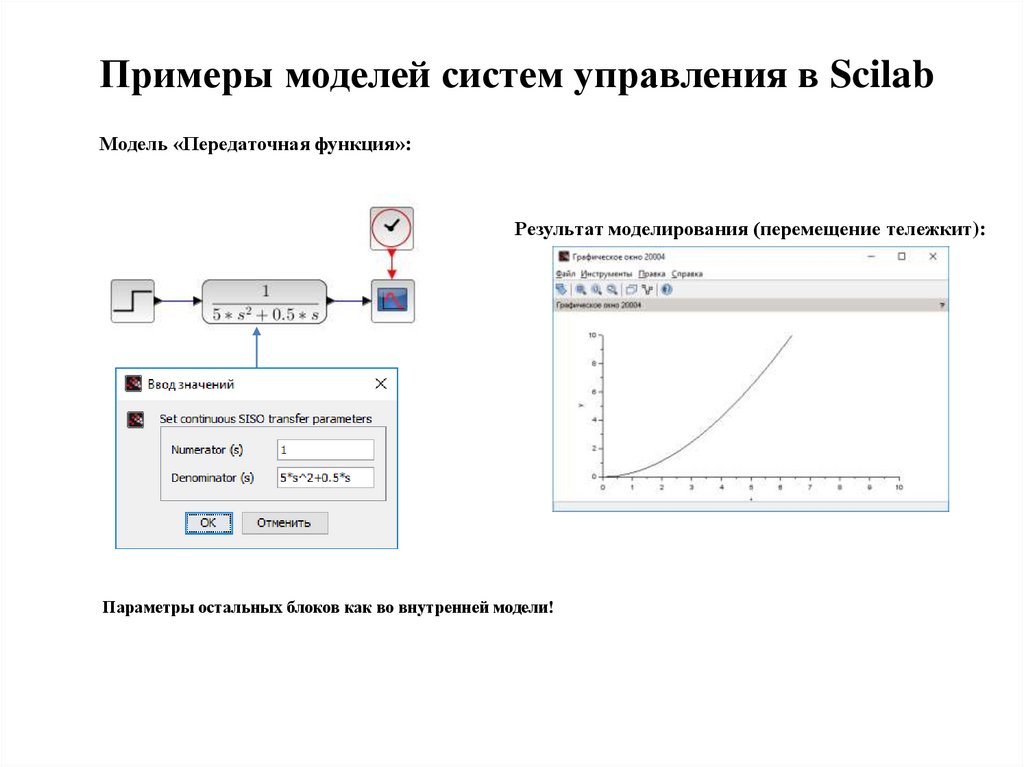
6.
Примеры моделей систем управления в ScilabМодель «Передаточная функция»:
Результат моделирования (перемещение тележкит):
Параметры остальных блоков как во внутренней модели!
7.
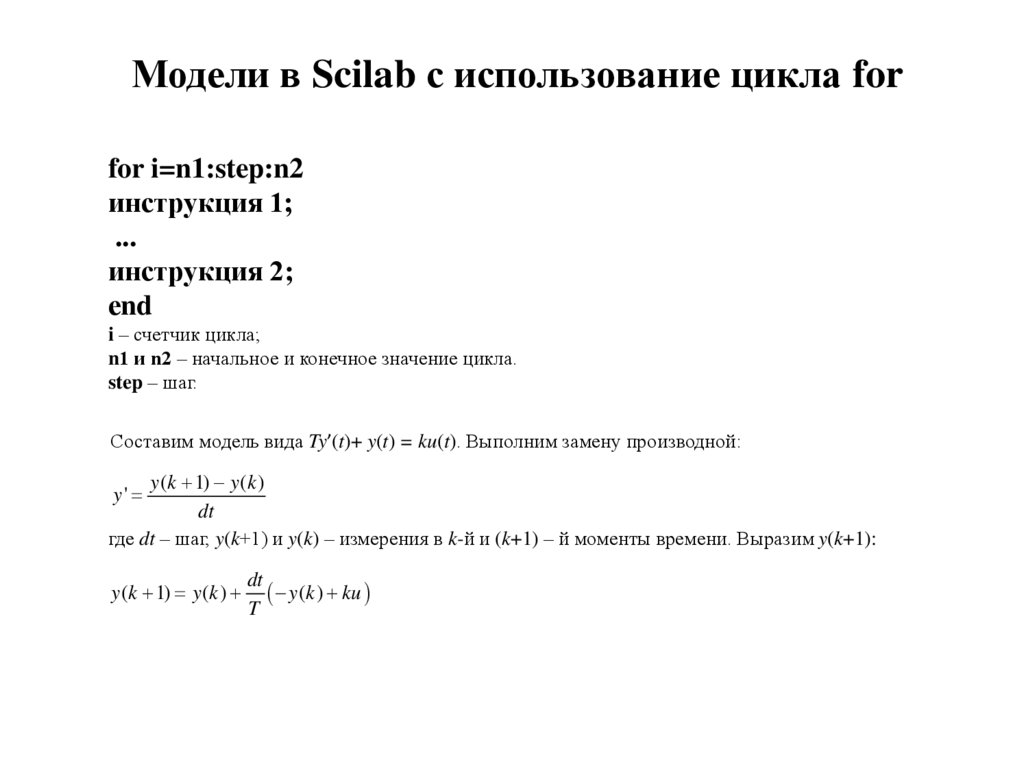
Модели в Scilab с использование цикла forfor i=n1:step:n2
инструкция 1;
...
инструкция 2;
еnd
i – счетчик цикла;
n1 и n2 – начальное и конечное значение цикла.
step – шаг.
Составим модель вида Ty’(t)+ y(t) = ku(t). Выполним замену производной:
y (k 1) y (k )
dt
где dt – шаг, y(k+1) и y(k) – измерения в k-й и (k+1) – й моменты времени. Выразим y(k+1):
y'
y (k 1) y (k )
dt
y (k ) ku
T
8.
Пример модели Ty’(t)+ y(t) = ku(t) в Scilab сиспользование цикла for
9.
Пример модели Ty’(t)+ y(t) = ku(t) в Scilab в XcosРезультаты
совпадают!
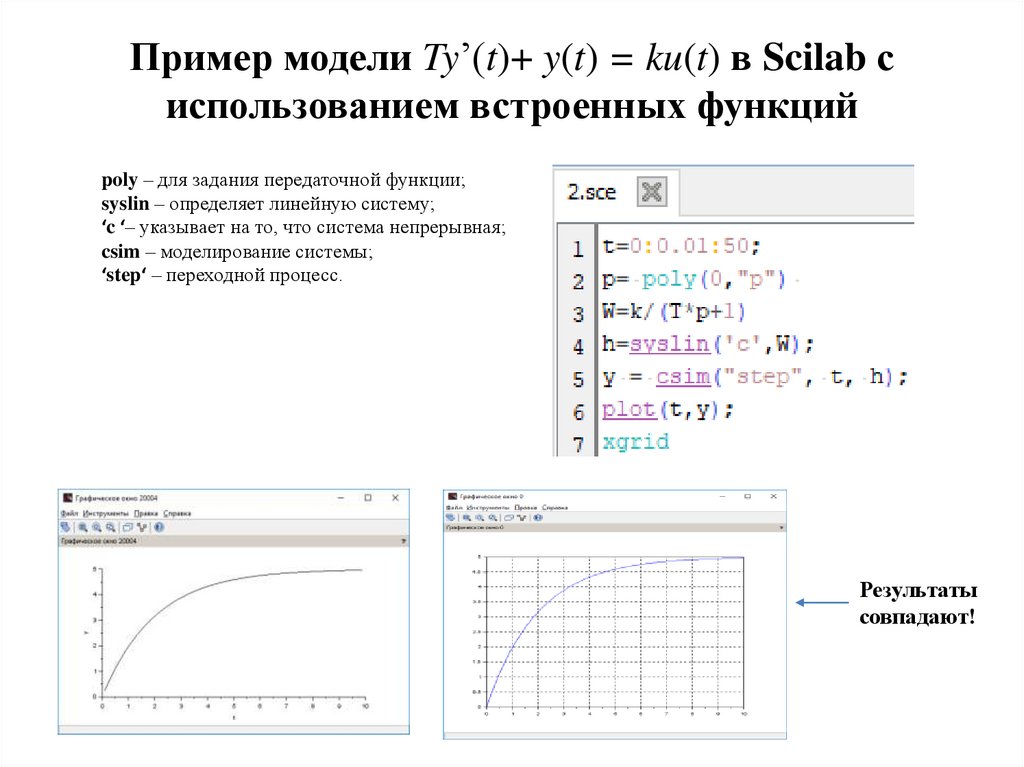
10.
Пример модели Ty’(t)+ y(t) = ku(t) в Scilab сиспользованием встроенных функций
poly – для задания передаточной функции;
syslin – определяет линейную систему;
‘c ‘– указывает на то, что система непрерывная;
csim – моделирование системы;
‘step‘ – переходной процесс.
Результаты
совпадают!