































 Физика
Физика Военное дело
Военное делоПохожие презентации:










Модели и характеристики отраженных сигналов, шумов и помех. Лекция №5. Часть 1. Теоретические основы радиолокации
1.
Военно-инженерный институтДисциплина
«РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ»
Часть 1. Теоретические основы радиолокации
2.
1Дать характеристику отраженным сигналам,
шумам и помехам, раскрыв содержание основных
физических факторов, определяющих параметры и
модели их формального представления.
3.
1. Модели и характеристики отраженных сигналов.2. Статистические характеристики шумов и помех.
3. Структура и математическая модель мешающих
отражений.
4.
Первый вопрос:Модели и характеристики отраженных сигналов.
5.
6.
7.
8.
9.
10.
11.
Интервал времени, характеризующий ширину пика автокорреляционной функции, наприме1
τк
Fд
Параметр
может быть назван временем
корреляции. Время корреляции связано с шириной
энергетического спектра модулирующего множителя
обратно пропорциональной зависимостью. В случае
сильной статистической связи последовательных значений
сигнала имеет место узкий спектр флюктуаций и
наоборот.
Функции автокорреляции широко используются при
анализе влияния флюктуаций на обнаружение и измерение
параметров радиолокационных сигналов.
12.
1. Таким образом, реальный отраженный сигнал имеетслучайные амплитуду и фазу. Флюктуационные
составляющие параметров отраженного сигнала
называют шумом цели.
2. Для полного описания отраженного сигнала
необходимо знать плотность распределения его
амплитуд и фаз. Важное значение для анализа
погрешности сигналов и выбора схем их обработки
имеют автокорреляционная функция и энергетический
спектр отраженного сигнала.
13.
14.
Шум — случайные колебания токов и напряжений в радиоэлектронныхустройствах, возникают в результате неравномерной эмиссии электронов в
электровакуумных приборах (дробовой шум, фликкер-шум), неравномерности
процессов генерации и рекомбинации носителей заряда (электронов
проводимости и дырок) в полупроводниковых приборах, теплового движения
носителей тока в проводниках
U, В
t, c
Термин «белый шум» обычно применяется к сигналу, имеющему
автокорреляционную функцию, математически описываемую дельта-функцией
Дирака по всем измерениям многомерного пространства, в котором этот сигнал
рассматривается. Сигналы, обладающие этим свойством, могут рассматриваться
как белый шум. Данное статистическое свойство является основным для
сигналов такого типа.
15.
Белый шум.Белым шумом называется модель флуктуационной помехи с
постоянной спектральной мощностью N0 на бесконечном интервале
частот (т.е. fмакс → ∞). Для белого шума справедливы две модели
спектральной плотности, представленные на рис.10.
N(f)
N(f)
N0
N0/2
f
Заменив
cos2πfτ
по
формуле
корреляционную функцию белого шума
f
Рис. 10.
Эйлера,
N
N
N
R( ) 0 e j 2 f e j 2 f df 0 e j 2 f df 0 ( )
2 0
2 0
2
где e
2 f
найдем
df ( ) - дельта - функция Дирака
(6)
16.
Иногда ошибочно предполагается, что Гауссовый шум (то есть шум снормальным распределением) эквивалентен белому шуму. Однако эти понятия
не эквивалентны. Гауссовый шум предполагает распределение значений
сигнала в виде нормального распределения, тогда как термин «белый» имеет
отношение к корреляции сигнала в два различных момента времени (эта
корреляция не зависит от распределения значений шума). Белый шум может
иметь любое распределение — как Гаусса, так и распределение Пуассона, Коши
и так далее.
17.
Для решения задач синтеза и анализа в радиолокациииспользуют две основные модели флуктуационной помехи:
квазибелый и белый шум.
Квазибелый шум.
Квазибелым шумом называют шум, имеющий постоянную
спектральную плотность мощности в полосе частот:
N(f)
N(f)
N0
N f N0 , при 0 f f max
fmax
f
N0
fmin
N f N0 при
fmax
f
f min f f max
18.
Скорость изменения мгновенныхопределяется корреляционной функцией
значений
помехи
T
1
R lim n(t )n(t )dt R 0 ,
T T
0
где ρ(τ) - нормированная корреляционная функция.
Или, учитывая связь N(f) и R(τ), запишем
R N ( f )cos 2 f df .
0
Подставляя поочередно в последнее выражение значения N(f)
из (2) и (3) получим соответственно
sin 2 f max
R( ) N 0 cos 2 f N 0 f max
2 f max
0
f max
и
f max
R( ) N 0 cos 2 f dt N 0 П
f min
sin П
cos 2 f 0
П
(4)
,
(5)
19.
Из анализа последних выражений следует, чтоR(0) 2п N0 f max
и
R(0) 2п N0 П ,
x
x
а нормированные корреляционные функции имеют вид sin , (рис 9).
ρ(τ)
ρ(τ)
1/2fmax
1/4f0
τ
τ
Рис. 9.
1/П
Найдем время корреляции квазибелого шума. Для этого
воспользуемся выражением (4). Очевидно, что ρ(τ)=0 тогда, когда
sin2πfmaxτ = 0, т.е. 2πfmaxτ = nπ; где n = 1,2.... 2fmaxτ = 1; => τ = 1/2fmax .
Таким образом, с увеличением значения fмах время корреляции
уменьшается, т.е. чем шире спектр помехи, тем выше скорость
изменения её мгновенных значений.
20.
Иллюстрация формирования корреляционного интеграла Zот времени t
21.
Белый шум является дельта-коррелированным - это означаетбесконечно высокую скорость изменения его мгновенных значений
и бесконечную мощность. Поэтому белый шум является
абстракцией, удобной при анализе устройств обработки.
При синтезе оптимальных алгоритмов обработки РЛ
сигналов, кроме корреляционных и спектральных характеристик
помехи, требуется знание плотности вероятности её распределения.
Многомерная плотность вероятности помехи
Случайную реализацию y(t) = n(t) можно однозначно задавать
некоторой совокупностью своих дискретных значений. В этом
случае принятая реализация
n(t) = n(t 1,t 2,...,t m).
Такая замена возможна на основании теоремы
Котельникова, согласно которой любая функция с
ограниченным спектром полностью определяется
отсчетом своих значений, взятыми через интервал
1
t f max .
2
22.
В соответствии с теоремой Котельниковаn(t ) nk k t .
k
где nk - элемент выборки в момент времени tk, a
sin 2 f max t tk
k t
.
2 f max t tk
Вид такой аппроксимации непрерывной функции можно
проиллюстрировать с помощью рис.12.
Ψ1(t)
n(t)
Ψk(t)
Ψ2(t)
0
Δt
2Δt
3Δt 4Δt
5Δt
... ...
(kn)Δt
…
…
kΔt
Рис. 12.
t
23.
Замечательным свойством такого представления является то,что коэффициенты разложения ψk(t) - некоррелированы, а значит
отсчёты
yk
независимые
случайные
величины.
Некоррелированность объясняется тем, что интервал дискретизации
Δt = tk+1-tk равен интервалу корреляции помехи.
Поэтому при таком представлении помехи ее статистика может
быть представлена плотностью вероятностей
P n P n1 , n2 , ...
С учетом теоремы Котельникова элементы вектора n независимы,
поэтому
P n ПP n
k
k
где Р(nk) - одномерная плотность.
Подставляя в Р(nk) значение мощности помехи, например, для
квазибелого шума, получим
1
P nk
e
2
nk 2
2
2
1
e
2 N0 f max
nk 2
2 N0 f max
t
e
N0
nk2 t
N0
.
24.
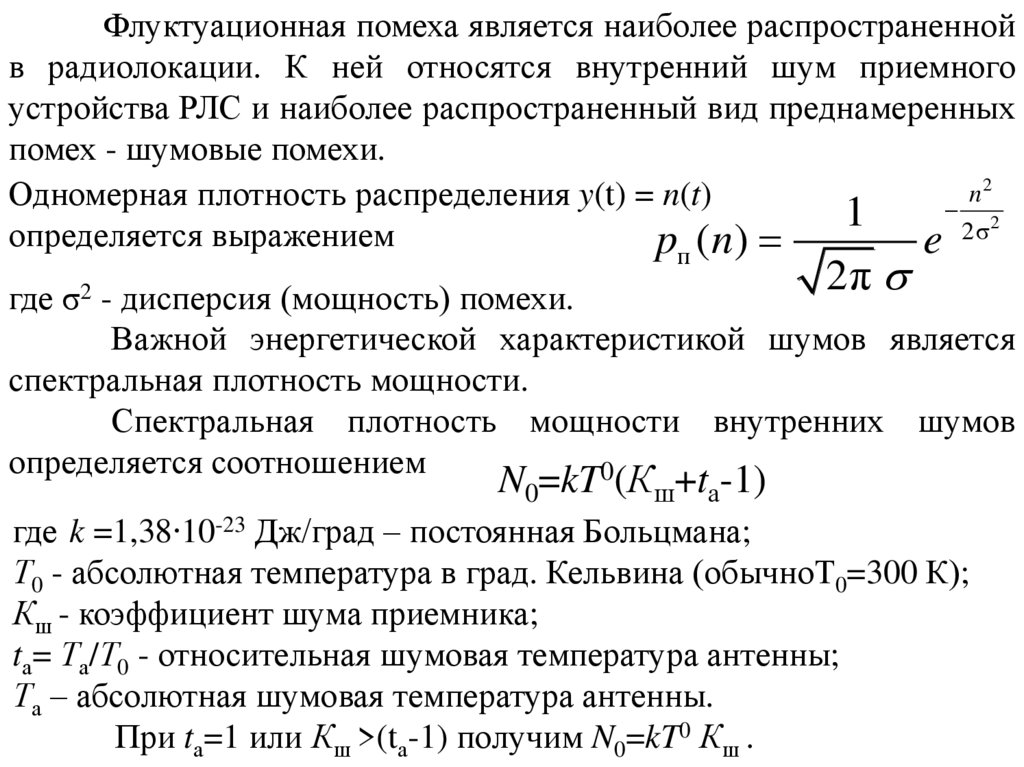
Флуктуационная помеха является наиболее распространеннойв радиолокации. К ней относятся внутренний шум приемного
устройства РЛС и наиболее распространенный вид преднамеренных
помех - шумовые помехи.
n2
Одномерная плотность распределения y(t) = n(t)
2
1
определяется выражением
p ( n)
e 2σ
п
2π
где σ2 - дисперсия (мощность) помехи.
Важной энергетической характеристикой шумов является
спектральная плотность мощности.
Спектральная плотность мощности внутренних шумов
определяется соотношением
0
N0=kT (Кш+tа-1)
где k =1,38∙10-23 Дж/град – постоянная Больцмана;
Т0 - абсолютная температура в град. Кельвина (обычноТ0=300 К);
Кш - коэффициент шума приемника;
tа= Та/Т0 - относительная шумовая температура антенны;
Та – абсолютная шумовая температура антенны.
При tа=1 или Кш >(tа-1) получим N0=kT0 Кш .
25.
Такимобразом,
полной
статистической
характеристикой колебаний помехи является плотность
вероятности. Колебания помехи описывают также с
помощью корреляционной функции и спектральной
плотности мощности.
26.
27.
Мешающиеотражения
обусловлены
вторичным излучением поверхностно и объёмно
распределенных отражателей, которые занимают
достаточно
большой
объем
пространства,
превышающий разрешаемый объем. Мешающие
отражения представляют собой результат наложения
случайно возникающих элементарных сигналов с
флюктуирующими амплитудой и фазой и поэтому
является случайным процессом с нормальной
плотностью распределения вероятностей.
Разрешаемый объем РЛС
Маскирующее
облако
дипольных отражателей
Общей особенностью мешающих отражателей является прямая связь с
зондирующим сигналом. Поэтому математическая модель мешающих
отражений почти не отличается от математической модели полезных
отраженных сигналов
N
N (t ) bk (t ) X (t tk )e
k 1
j 2 ( f 0 Fдк ) t k ( t ) bk
,
где N - количество элементарных участков пространства отражателей.
28.
Процесс формирования отраженного сигнала от мешающихотражателей поясним с помощью следующих графиков (рис. 13).
1
Xзонд(t)
2
3
4
t
Tп
Xотр1(t)
t
Xотр2(t)
t
Xотр3(t)
t
Xотр4(t)
t
XотрЦ(t)
tз
T
Рис. 13.
tз
t
29.
Когда отражатели сосредоточены в отдельных разрешаемыхобъёмах, помеха носит имитирующий характер, когда они
распределены и захватывают несколько разрешаемых объемов, маскирующий.
Внутрипериодная структура мешающих отражений подобна
структуре шумового процесса, длительность которого соответствует
реальной протяженности элементарных отражателей, попавших в
характеристику направленности антенны РЛС.
При отражении ЗС от различных частей протяженного
облака рассеивателей происходит «размывание» его закона
модуляции. Это приводит к тому, что модель мешающих отражений
нельзя представить в отличие от полезного сигнала произведением
комплексной огибающей и комплексного закона модуляции ЗС (tз1 ≠
tз2 ≠ tз3 ≠...≠ tзk и т.д.).
Энергетический спектр мешающих отражений определяется
как прямое преобразование Фурье от корреляционной функции
Sп ( f ) Rп ( )e j 2 t dt.
30.
Поэтомупри
использовании
периодического
ЗС
энергетический спектр мешающих отражений оказывается
гребенчатым с огибающей, определяемой энергетическим
спектром одиночного зондирующего сигнала (рис. 14).
Отраженные от целей сигналы и маскирующие пассивные помехи имеют
определенные отличия, связанные с различиями целей и отражателей,
создающих пассивную помеху. К числу основных различий можно отнести:
- распределенный характер мешающих отражателей и близкий к
сосредоточенному - блестящих элементов цели. Поэтому, повышая
разрешающую способность по координатам и сокращая при этом размеры
разрешаемого объема (во всяком случае, до размеров, превышающих размеры
самолета), можно добиться улучшения наблюдаемости сигнала на фоне
пассивных помех;
31.
- отличия в поляризации отраженных сигналов наблюдаются, еслипассивная помеха создается, например, гидрометеорами (дождь, тучи),
состоящими из мелких капель, имеющих форму шара. Если гидрометеоры
облучаются колебаниями с круговой поляризацией, то они отражают
колебания также с круговой поляризацией, но с обратным (если смотреть в
направлении распространения волны) вращением плоскости поляризации.
Если приемная антенна не воспринимает колебания с такой поляризацией, она
тем не менее может принимать колебания от целей, обладающих
несимметрией структуры;
- различия в скорости перемещения мешающих отражателей и цели. Скорость
перемещения наземных мешающих отражателей относительно наземной
радиолокационной станции равна нулю, в то время как представляющие
практический интерес цели перемещаются с достаточно большой скоростью.
Если пассивная помеха создается противорадиолокационными
отражателями, то эти отражатели, будучи сброшены с самолета,
быстро теряют первоначальную скорость, приобретая скорость,
близкую к скорости ветра.
Различия в радиальных скоростях целей и отражателей могут
быть использованы для селекции по скорости (иначе по эффекту
движения цели) называют селекцией движущихся целей (СДЦ).
32.
Таким образом, из рассмотрения статистических характеристикмешающих отражений следует:
1. Корреляционные свойства мешающих отражений
определяются
корреляционными
свойствами
ЗС
и
корреляционными свойствами, вносимыми случайными
перемещениями элементарных отражателей.
2. Энергетический спектр мешающих отражений подобен
энергетическому спектру отраженного сигнала, отличается от
него доплеровским сдвигом по частоте Fдп и расширением
спектра.
3. Отличия характеристик и мешающих
позволяют осуществлять их селекцию.
отражений
33.
1. При отражении от движущейся блестящей точки зондирующийсигнал претерпевает:
- трансформацию временного масштаба;
- трансформацию частоты.
2. При отражении от реальной цели отраженный сигнал приобретает
случайный характер.
3. Основными статистическими характеристиками отраженных
сигналов являются:
- закон распределения вероятностей амплитуды и фазы;
- автокорреляционная функция флуктуаций и
энергетический спектр.
4. Основными статистическими характеристиками шумов и помех
являются:
- плотность распределения мгновенных значений;
- корреляционная функция;
- энергетический спектр.
34.
5. Основными моделями внутреннего шума и флуктуационнойпомехи
являются:
- квазибелый шум;
- белый (дельтакоррелированный) шум.
6. Основными отличиями сигналов от целей и мешающих
отражений
являются:
- поляризационные;
- пространственные (распределенный характер помехи и
сосредоточенный - цели);
- скоростные (различия в скорости перемещения мешающих
отражателей и цели).
35.
Отработать материал лекции в соответствии срекомендованной литературой:
Л 1/о с. 49-65