






















 Математика
МатематикаПохожие презентации:




")




")
Системы линейных уравнений
1.
Российская академия народного хозяйства игосударственной службы при Президенте РФ
Институт права и национальной безопасности
Факультет таможенного дела
Раздел 1 тема № 2
«СИСТЕМЫ ЛИНЕЙНЫХ
УРАВНЕНИЙ»
Лекция № 1
профессор Резниченко Александр Васильевич
Москва – 2016
2.
УЧЕБНЫЕ ВОПРОСЫ:1. Основные понятия и определения
2. Методы решения систем алгебраических уравнений
3. Системы линейных однородных
уравнений
3. Литература
1. «Высшая математика для экономического бакалавриата: Учебник и практикум» / Под ред. проф. Н.Ш.Кремера. – М.: "Юрайт", 2016.
2. «Математика для экономистов от арифметики до
эконометрики: базовый курс» / Под ред. проф. Н.Ш.
Кремера. – М.: "Юрайт", 2016.
3. Демидович Б.П., Кудрявцев В.А. «Краткий курс
высшей математики: Учебное пособие для вузов» М.: ООО «Издательство Астрель», 2011.
4.
ПЕРВЫЙ ВОПРОСОсновные понятия и
определения
5.
Определение.Системой m линейных алгебраических уравнений c n
переменными называется система уравнений вида:
a11 x1 a12 x2 a1 j x j a1n xn b1
Краткая форма
записи
a21 x1 a22 x2 an2 j x j a2 n xn b2
1
a x
i
,
m
b
ij
j
i
,
ij x j ain xn b j
ai1 x1 ai 2 x2 ja 1
am1 x1 am 2 x2 amj x j amn xn bm
где x1, … xn – неизвестные величины (переменные);
aij, bi ( i = 1 ÷ m, j = 1 ÷ n ) – произвольные числа, называемые
соответственно коэффициентами при переменных и свободными
членами уравнений.
6.
Определение.Решением системы m линейных алгебраических уравнений c n переменными называется такая совокупность чисел
(x1 = k1, x2 = k2 …, xn = kn), при которых каждое уравнение системы
превращается в верное равенство (тождество).
Определение.
Система уравнений называется совместной, если она имеет
хотя бы одно решение, и несовместной, если она имеет не
решений.
Определение.
Совместная система уравнений называется определенной,
если она имеет единственное решение, и неопределенной,
если решений больше одного.
Пример.
совместная ии неопределенная
определенная
22x1x1 x2x2 20
10 совместная
несовместная
.x2с=–0любое
(
x
=
10,
).
(
x
=
с
,
x
=
10
–
2с
),
число.
1
1
2
x
x
10
4
x
2
x
20
2
x
x
15
1 11 2 22
7.
Матричная форма записи системы m линейныхалгебраических уравнений c n переменными
где А – матрица коэффициентов при переменных или матрица системы;
X – матрица-столбец переменных;
В – матрица-столбец свободных членов.
a11 x1 a12 x2 a1n xn b1
a21 x1 a22 x2 a2 n xn b2
Аm ,n Х n ,1
...
a x a x a x b
m
mn n
m1 1 m 2 2
АХ В.
8.
Векторная форма записи системы m линейныхалгебраических уравнений c n переменными
a11
a12
a1n
a21
a22
a2 n
А1 , А2
... Аn
;
...
...
...
a
a
a
m1
m2
mn
b1
b2
В
...
b
m
где А1, А2 …Аn – вектор-столбцы коэффициентов при переменных x1,… xn;
В – вектор-столбец свободных членов.
А1 х1 А2 х2 ... Аn хn B
n
или
А х
j 1
j
j
B.
9.
ВТОРОЙ ВОПРОСМетоды решения систем
алгебраических уравнений
10.
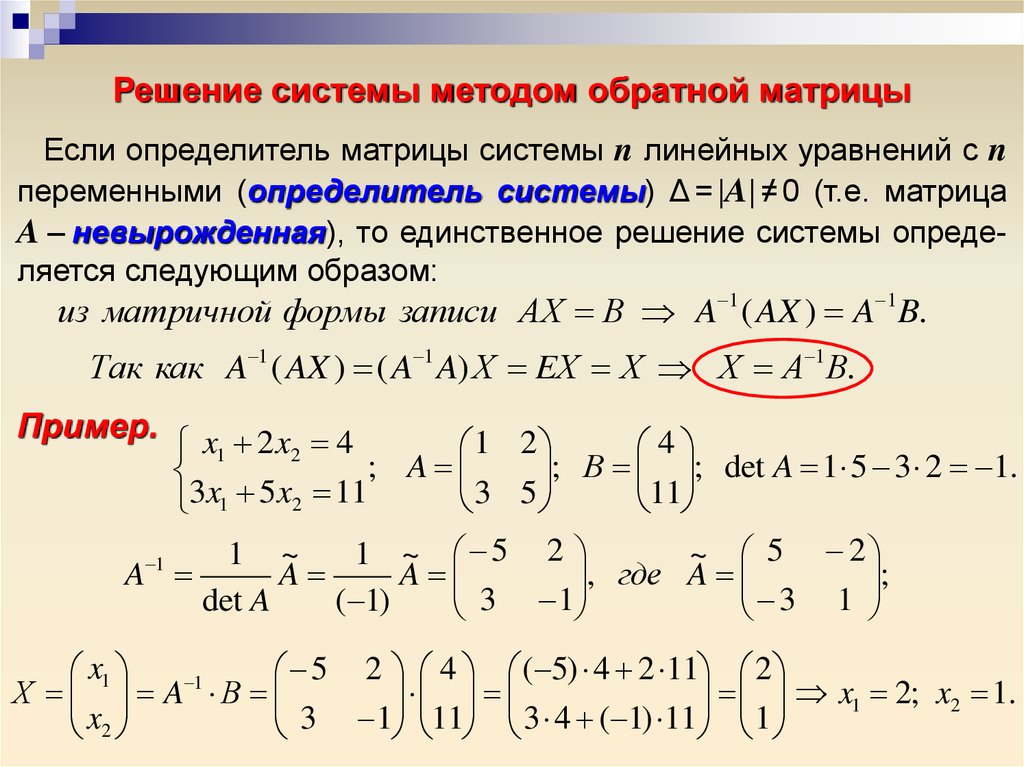
Решение системы методом обратной матрицыЕсли определитель матрицы системы n линейных уравнений с n
переменными (определитель системы) Δ = |A| ≠ 0 (т.е. матрица
A – невырожденная), то единственное решение системы определяется следующим образом:
из матричной формы записи АХ В A 1 ( AX ) A 1B.
Так как A 1 ( AX ) ( A 1 A) Х EХ Х Х А 1В.
Пример.
x1 2 x2 4
1 2
4
; В ; det A 1 5 3 2 1.
; A
3 5
11
3x1 5x2 11
1 ~
1 ~ 5 2
~ 5 2
, где A
;
A
A
A
det A
( 1)
3 1
3 1
1
x1
5 2 4 ( 5) 4 2 11 2
1
x1 2; x2 1.
Х A В
3 1 11 3 4 ( 1) 11 1
x2
11.
Решение системы методом КрамераТеорема Крамера.
Пусть Δ – определитель матрицы A, Δj – определитель матрицы,
получаемый из матрицы A заменой j-го столбца столбцом свободных членов. Тогда, если Δ ≠ 0, то система имеет единственДоказательство.
ное решение, определяемое по формулам:
b1 A11 b2 A21 ... bn An1
x1
A11 A21 ... An1 b1
j
x2 1 Ax12j A22 ... ( jAn 2 1, 2b2, ..., n1). b1 A12 b2 A22 ... bn An 2
1
Х А В
...
...
A ... ... ... ...
...
x
A
n
1n A2 n ... Ann bn
b1 A1n b2 A2 n ... bn Ann
j
1
x j (b1 A1 j b2 A2 j ... bn Anj )
( j 1,Габриэль
2, ..., nКрамер
).
12.
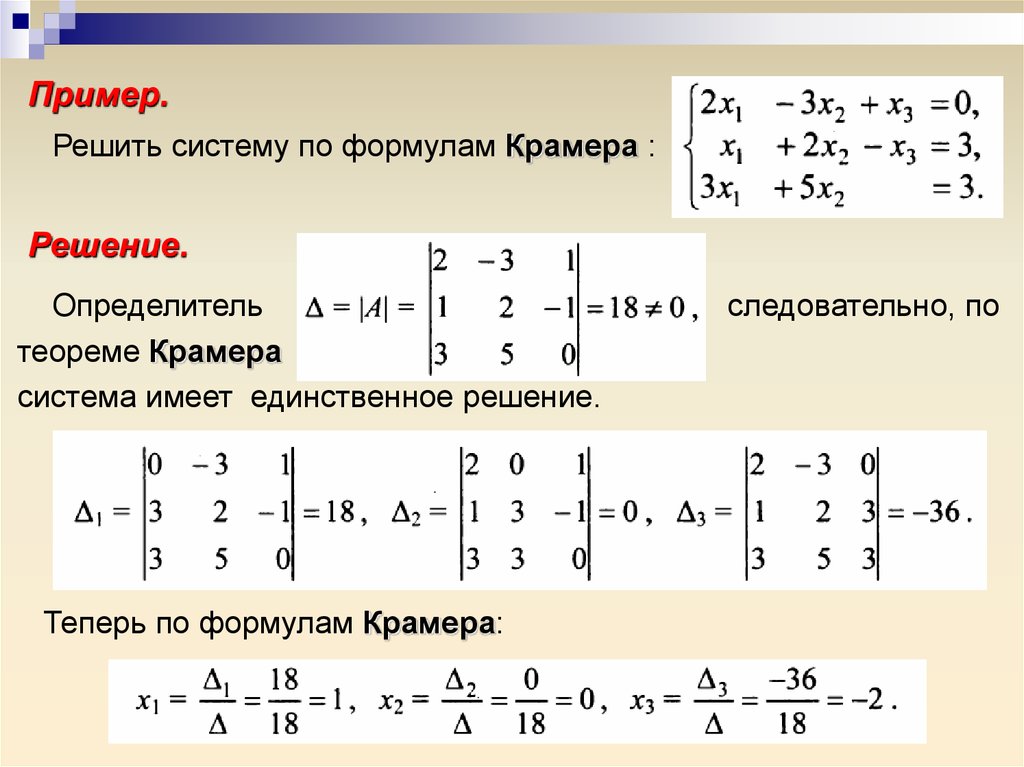
Пример.Решить систему по формулам Крамера :
Решение.
Определитель
теореме Крамера
система имеет единственное решение.
Теперь по формулам Крамера:
следовательно, по
13.
Метод Гаусса системы m линейных уравненийc n переменными
Метод Гаусса – метод последовательного исключения
переменных – заключается в том, что с помощью элементарных
преобразований система уравнений приводится к равносильной*
системе ступенчатого (треугольного) вида, из которой последовательно, начиная с последних (по номеру) переменных, находятся
все остальные переменные.
Переход от исходной системы к равносильной ей системе
ступенчатого (треугольного) вида называется прямым ходом
метода Гаусса, а нахождение переменных – обратным ходом.
Преобразования Гаусса удобно проводить не с самими уравнеИоганн Карл
ниями, а с расширенной
коэффициентов (АlВ) – расшиФридрих матрицей
Гаусс
ренной матрицей системы – для чего к матрице А приписывают
столбец свободных членов В.
*
Две системы уравнений называются равносильными (эквивалентными ), если они имеют
одно и то же множество решений.
14.
Пример.Методом Гаусса решить систему:
Решение.
Выпишем расширенную матрицу системы.
Для удобства вычислений (чтобы а11 = 1) поменяем местами
первую и четвертую строки:
Шаг 1. Умножим элементы первой строки на -5, 3 и -2 и
прибавим их соответственно к элементам второй, третьей и
четвертой строк, чтобы под элементом а11 в первом столбце
образовалась «ступенька» из нулей.
15.
Для проведения второго шага необходимо, чтобы в новойматрице а22 ≠ 0, но удобнее, чтобы а22 = 1 или а22 = -1.
Поэтому переставим вторую и третью строки:
Шаг 2.
Элементы второй строки умножаем на 4 и 3 и
прибавляем соответственно к элементам третьей и четвертой
строк, тогда под элементом а22 во втором столбце появится
вторая «ступенька».
16.
Шаг 3. Так как в полученной матрице а33 = 26 ≠ 0, умножаемэлементы третьей строки на -24/26 (-12/13) и прибавляем к
элементам четвертой строки.
Расширенная матрица приведена к ступенчатому виду.
x4 1, x3 0, x2 7, x1 5.
17.
Замечание.Обратный ход метода Гаусса можно проводить и с расширенной
матрицей, не переходя к системе, если эту матрицу с помощью
элементарных преобразований привести к диагональной.
x1 5, x2 7, x3 0, x4 1 .
18.
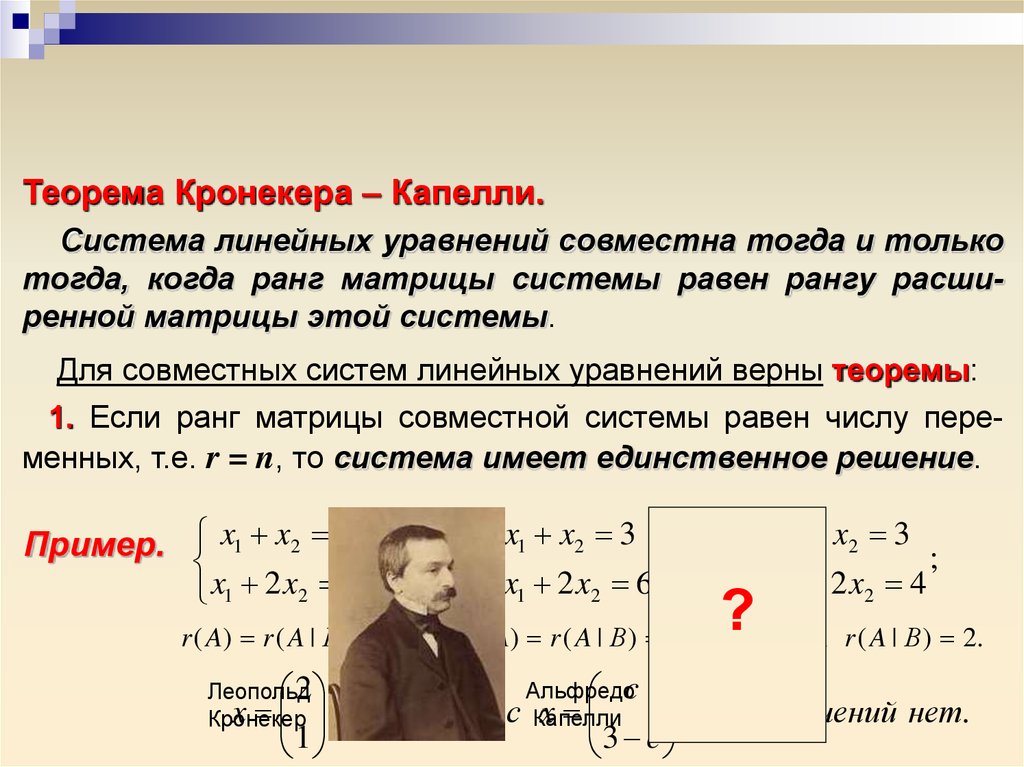
Теорема Кронекера – Капелли.Система линейных уравнений совместна тогда и только
тогда, когда ранг матрицы системы равен рангу расширенной матрицы этой системы.
Для совместных систем линейных уравнений верны теоремы:
1. Если ранг матрицы совместной системы равен числу переменных, т.е. r = n, то система имеет единственное решение.
2. Если ранг матрицы совместной системы меньше числу пере–
m–
r3<система
x1 rx(А)
3беско неопределенная
и xимеет
2 ≠3r (АlВ) –
1 x2r = m
Пример.т.е. rx1< уравнения
менных,
nx,2 то
; системы
;
система
система;
решений.
4
2 x2 6
2 x2 4
нечное
множество
Система
m x1 2 x2зависимые
2 x1 несовместная
2 x1 определенная
?
линейных
r ( A) r ( A | В ) 1;
r ( A) 1 r ( A | В ) 2.
уравнений c rn( A) r ( A | В ) 2;
r<m–
r=m–
r (А) = r (АlВ) = r –
переменными
Альфредо
2
c
Леопольд
система
система
уравнения
системы
x
;
с
x
;
Решений
нет.
Капелли
Кронекер
неопределенная
независимые
совместная
1
3 c
19.
Определение.Пусть r < n, тогда r переменных x1, x2, …, xr называются
основными или базисными, если определитель матрицы из
коэффициентов при них (базисный минор) отличен от нуля.
Остальные n - r переменных называются неосновными или
свободными.
Определение.
Решение системы m линейных уравнений c n переменными, в
котором все n-r неосновных переменных равны нулю, называется
базисным.
Таким образом, совместная система m линейных уравнений
c n переменными (m < n) имеет бесконечное множество решений, среди которых базисных решений конечное число, не
r
превосходящее Сn, где r ≤ m.
20.
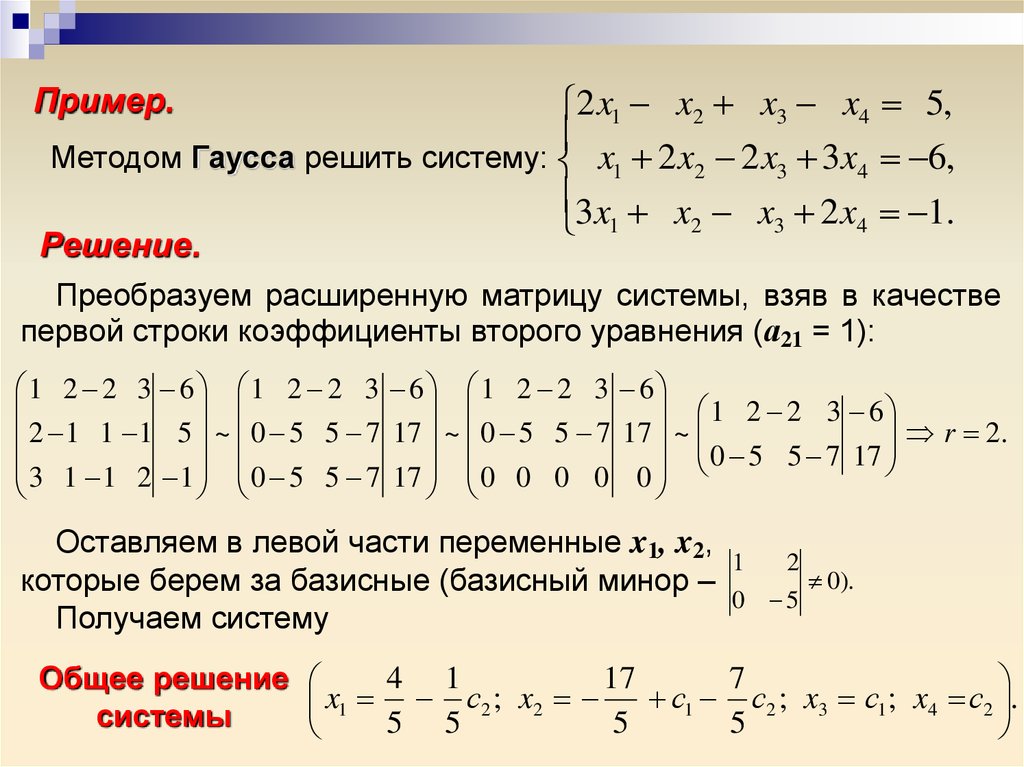
2 x1 x2 x3 x4 5,Методом Гаусса решить систему: x1 2 x2 2 x3 3x4 6,
3x x x 2 x 1.
2
3
4
1
Пример.
Решение.
Преобразуем расширенную матрицу системы, взяв в качестве
первой строки коэффициенты второго уравнения (а21 = 1):
1 2 2 3 6 1 2 2 3 6 1 2 2 3 6
1 2 2 3 6
r 2.
2 1 1 1 5 ~ 0 5 5 7 17 ~ 0 5 5 7 17 ~
3 1 1 2 1 0 5 5 7 17 0 0 0 0 0 0 5 5 7 17
Оставляем в левой части переменные x1, x2,
которые берем за базисные (базисный минор –
Получаем систему
1
2
0).
0 5
x1 2 x2решение
6 2 x3 3x4 4 1
Общее
17
7
17
4 1
x
с
;
x
с
с
;
x
с
;
x
с
,
откуда
x
x
x
x
x
.
системы
1
2
24
1
4 4 2 .
22
31
13
5
55
5 5
5x2 17 5x3 7 x4 5 5
21.
Пример.Найти все базисные решения
системы :
Решение.
2 x1 x2 x3 x4 5,
2 x1 x2 x3 x4 5,
x1 2 x2 2 x3 3x4 6,
x1 2 x2 2 x3 3x4 6.
3x1 x2 x3 2 x4 1.
Ранг матрицы системы r = 2.
4 3
r
2
С
C
6,
Общее число базисных переменных не более n
4
1 2
а именно: x1, x2; x1, x3; x1, x4; x2, x3; x2, x4; x3, x4.
Из всех возможных групп базисных переменных
только x2, x3 не могут быть основными, поскольку
1
1
0.
2 2
Найдем первое базисное решение, взяв в качестве основных
переменных x1, x2 а неосновных – x3 = 0 и x4 = 0.
Первое
Замечание.
базисное
x1 базисные
x2 5, решения
2Все
4 системы
17 можно
найти решение
из общего
x
,
x
.
1 в предыдущем
2
(4/5;последовательно
-17/5; 0; 0)
решения,
полученного
примере,
x
2
x
6
.
5
5
2
1
приравнивая
соответствующие переменные нулю.
22.
ТРЕТИЙ ВОПРОССистемы линейных
однородных уравнений
23.
Определение.Система m линейных уравнений c n переменными называется
системой линейных однородных уравнений, если все их
свободные члены равны нулю:
a11 x1 a12 x2 a1n xn 0
a x a x a x 0
21 1
22 2
2n n
am1 x1 am 2 x2 amn xn 0
Свойства:
1. Система линейных однородных уравнений всегда совместна,
так как она имеет, по крайней мере, нулевое решение.
2. Если в системе m = n, а ее определитель отличен от нуля, то
такая система имеет только нулевое решение.
3. Система линейных однородных уравнений имеет ненулевве
решения тогда и только тогда, когда ранг ее матрицы коэффициентов при переменных меньше числа переменных: r (A) < n.
24.
Определение.Обозначим
линейных линейно
однородных
уравНенулевые решение
векторы е1системы
,е2,…,еk называются
независинений
= k1, xих2 =линейная
k2 …, xn = комбинация
kn в виде строки
= ( k1, k2 …,
kn ).
мыми, x1если
равна е1нулевому
вектору
только при нулевых значениях числовых коэффициентов
Свойства
решений:
(тривиальная
линейная комбинация):
k
1. Если строка е1 = ( k1, k2 …, kn ) – решение системы, то и строка
λi еi λ1e1 λ2e2 ... λk ek 0 λi 0 i 1 k .
λе1 = (λk1, λk
2 …, λkn ) – также решение этой системы.
i 1
в 2.
противном
случае
)
Если строки
е1 = ((нетривиальная
k1, k2 …, kn ) и е2 линейная
= ( l1, l2 …,комбинация
ln ) – решения
системы, то при любых с1 и с2 ихk линейная комбинация
i λ 0
λi еi 0
с1 е1 + с2 е2 = (сi 1 k1+ с2l
,
с
1i 1 1k2 + с2l2, …, с1kn + с2ln)
эти
векторы
называются
зависимыми.
– также
решение
даннойлинейно
системы.
Определение.
Всякая линейная комбинация решений системы линейных
однородных
уравнений
также является
решением
этой
системы
Система линейно
независимых
решений
е1,е2,…,е
k называется
фундаментальной, если каждое решение системы является
линейной комбинацией решений е1,е2,…,еk.
25.
Теорема.Если ранг r матрицы А коэффициентов при переменных
системы линейных однородных уравнений меньше числа переменных n (r (А) = r < п), то всякая фундаментальной система
решений системы линейных однородных уравнений состоит
из k = п - r решений .
Общее решение системы имеет вид:
с1е1 + с2е2 + ... + сk еk,
где е1, е2, …, еk – любая фундаментальной система решений;
с1, с2, …, сk – произвольные числа.
Для нахождения фундаментальной системы решений:
а) r основных (базисных) переменных (с отличным от нуля
базисным минором) выражают через свободные переменные;
б) поочередно заменяют (п - r) неосновных переменных элементами каждой строки невырожденной квадратной матрицы
порядка п - r, например, единичной Еп-r.
26.
Пример.Найти фундаментальную
систему решений:
Решение.
2 x1 x2 x3 x4 05, ,
x1 2 x2 2 x3 33xx44 06, ,
3x x x 22xx 01. .
44
2
3
1
Аналогично находим выражения основных переменных x1, x2,
через свободные x3, x4 .
x3x
3x34x4
6 2 2
x1 2 x2 0
3
..
Получаем систему
5x2 017 5 x53x3 7 x74x4
Для нахождения фундаментальной системы решений заменяем
поочередно неосновные переменные
1 0
.
x3, x4 элементами строк единичной матрицы: E4 2 E2
0 1
Фундаментальную
систему из
решений
При x3 = 1, а x4 = 0 получаем
системы образуют
x2 = 1, а решения:
x1 = 0.
При x3 = 0, eа1 x
= 1 получаем
системы
x2 =0;-7/5,
=4 (0;1;1;0);
e2 из
= (-1/5;
-7/5;
1). а x1 = -1/5.
27.
Пример.Теорема.
2 x1 x2 x3 x4 5, 2 x1 x2 x3 x4 0,
Общее
решение системы m линейных уравнений c n
2 x3 3сумме
x4 6,общего
2 x2 2 x3 соответст3x4 0,
переменными
x1 2 x2 равно
x1 решения
3x ей
3однородных
вующей
системы
линейных
уравнений
и
x
x
2
x
1
.
x
x
x
2
x
0
.
1
2
3
4
2
3
4
1
произвольного частного решения системы.
Решение.
xоб = хч + с1е1 + с2е2 + …+ сnеn,
Сравнивая
их, получаем:
4 1
17
7
Общее
решение
об
х
x
с
;
x
с
с
;
x
с
;
x
с
об
ч
1
2общее
2
1
2
3
1 сис4
2 .
гдесистемы
x и х – соответственно
и
частное
решения
5 5
5
5
4
1
темы m линейных уравнений c n переменными;
с2 4 5 0 1 5
17
4
Частное
ч
5
5
е
,
е
,…,е
–
фундаментальная
1 2
, при с1 решений
0 и с2 0.системы
n х ; ; 0; 0 система
(базисное)
7 линейных
7 5
17 55 однородных
51 уравнений.
17
об
ч
с1 с2
с1 с2
, или x x с1е1 с2е2 .
5
5
0
1
0
решений
система
Фундаментальная
однородной
системы:
с1
0 0 1
с2
e1 = (0;1;1;0); e2 = (-1/5; -7/5; 0; 1).
28.
Благодарю за внимание,лекция окончена!