

















 Математика
МатематикаПохожие презентации:










Векторная алгебра. Основные понятия. Тема 2. Векторная алгебра и аналитическая геометрия
1.
ВЕКТОРНАЯ АЛГЕБРАОСНОВНЫЕ ПОНЯТИЯ
2.
Тема 2. Векторная алгебра и аналитическая геометрия§1. Векторы. Линейные операции над векторами. Проекция вектора на ось.
Вектор – совокупность направленных отрезков, имеющих общее направление и
одинаковую длину.
Направление вектора принято обозначать стрелкой.
Вектор обозначается a или AB (A – начало, B – конец вектора).
Вектор BA называется противоположным вектору AB
Вектор, противоположный a, обозначается ( a ).
Расстояние между началом и концом вектора называется его длиной. Длина вектора
обозначается a или AB .
3.
Если начало и конец вектора совпадают (длина вектора равна нулю), то векторназывается нулевым и обозначается 0.
Вектор, длина которого равна 1, называется единичным и обозначается e .
Единичный вектор, направление которого совпадает с направлением вектора a,
называется ортом вектора a, и обозначается a0 .
Если векторы a и b параллельны одной прямой, то они называются
коллинеарными (a || b ).
При этом векторы могут быть направлены в одну сторону (сонаправлены a b )
или в разные стороны (противоположно направлены a b ).
Нулевой вектор считается коллинеарным любому вектору.
4.
Два вектора называются равными, если они имеют одинаковые длины, коллинеарныи сонаправлены.
Три вектора в пространстве называются компланарными, если они параллельны
некоторой плоскости.
*Если среди трех векторов хотя бы один нулевой или любые два вектора коллинеарны,
то такие векторы компланарны.
Линейные операции над векторами: сложение и вычитание векторов, умножение
вектора на число.
Домашнее задание. Записать и повторить правила сложения и вычитания векторов,
правило умножения вектора на число.
5.
Свойства линейных операций над векторами1. a b b a ;
2. (a b ) c a (b c );
3. ( a ) ( ) a;
4. ( )a a a;
5. (a b ) a b ;
6. a || b b a;
7. a | a | a0 .
6.
Проекция вектора на осьПусть в пространстве задана ось l (направленная прямая).
Проекцией точки M на ось l называется основание перпендикуляра MM1,
опущенного из точки M на ось l: прl М = М1.
Если М лежит на l, то прl М = М.
Пусть AB - произвольный ненулевой вектор.
прl A = A1, прl B = B1.
Проекцией вектора AB на ось l называется положительное число
если A1B1 l и отрицательное число A1 B1 , если A1B1 l.
A1B1 ,
7.
Свойства проекции вектора на ось1. прl a a cos , где (a , l );
2. прl a прl a;
3. прl a b прl a прl b .
8.
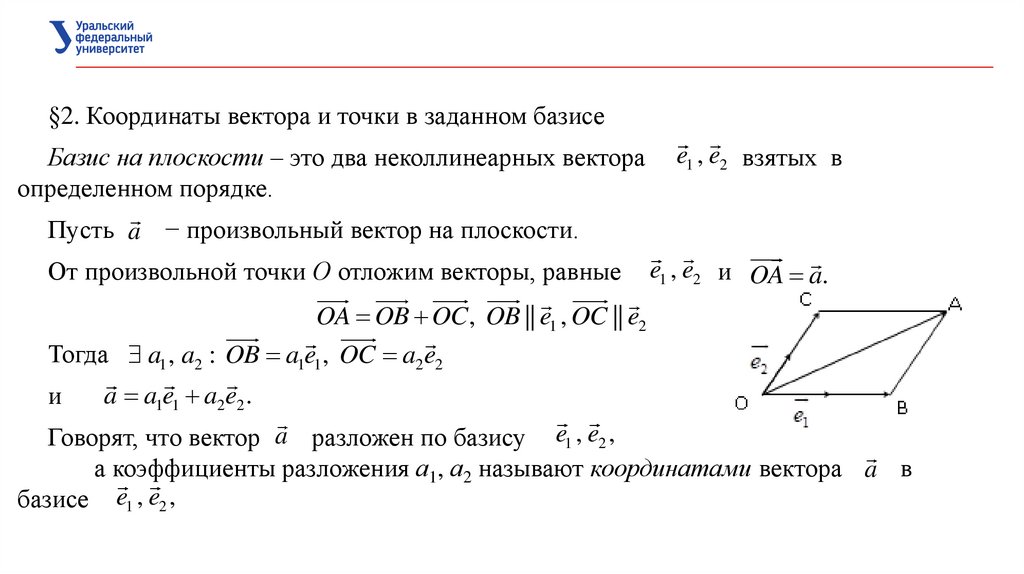
§2. Координаты вектора и точки в заданном базисеБазис на плоскости – это два неколлинеарных вектора
определенном порядке.
e1 , e2 взятых в
Пусть a − произвольный вектор на плоскости.
От произвольной точки О отложим векторы, равные
e1 , e2 и OA a.
OA OB OC , OB || e1 , OC || e2
Тогда a1 , a2 : OB a1e1 , OC a2e2
и
a a1e1 a2e2 .
Говорят, что вектор a разложен по базису e1 , e2 ,
а коэффициенты разложения а1, а2 называют координатами вектора a в
базисе e1 , e2 ,
9.
Базис в пространстве – это три некомпланарных вектора e1 , e2 , e3 ,взятых в определенном порядке.
Пусть a − произвольный вектор.
От произвольной точки О отложим векторы e1 , e2 , e3 и OA a.
Через точку А проведем прямую АВ,
параллельную вектору e3 , до пересечения
с плоскостью векторов
e1 , e2 .
Тогда OA OB BA, OB a1e1 a2e2 .
BA || e3 a3 : BA a3e3 .
e1 , e2 .
Следовательно, a a1e1 a2e2 a3e3 .
Коэффициенты а1, а2, а3 есть координаты в базисе e1 , e2 , e3
Обозначение a {a1 , a2 , a3} или
a1
a a2 .
a
3
10.
Свойства координат векторов1. a { a1 , a2 , a3};
2. a b {a1 b1 , a2 b2 , a3 b3};
a1 a2 a3
3. a || b
.
b1 b2 b3
11.
Рассмотрим базисные векторы e1 , e2 , e3 и поместим их в общее начало –фиксированную точку О (начало координат).
Через точку О и базисные векторы проведем оси координат Ох, Оу, Оz.
Рассмотрим точку А.
Вектор OA rA называется радиус-вектором точки А.
Координаты радиус-вектора rA называют
координатами точки А в базисе e1 , e2 , e3 или
в системе координат Oxyz.
Обозначение: А(x, y, z), если OA {x, y, z}.
Если A(x1, y1, z1) и B(x2, y2, z2), то
AB {x2 x1 , y2 y1 , z2 z1}.
х
12.
Пример (задача о делении отрезка в данном соотношении).Дано: A(x1, y1, z1), B(x2, y2, z2).
Найти: координаты точки С, делящей отрезок АВ в отношении .
Решение.
| AC |
AC CB .
По условию
| CB |
AC CB, поэтому AC CB. (*)
Рассмотрим радиус-векторы rA , rB , rC точек A, B, C.
Тогда AC rC rA , CB rB rC и равенство (*) примет вид:
r rB
rC rA rB rC rC A
.
1
Аналогичным соотношением связаны и координаты точек, т.е.
x1 x2
y1 y2
z1 z2
xC
, yC
, zC
.
1
1
1
13.
Если точка С делит отрезок АВ пополам, то =1 иx1 x2
y1 y2
z1 z2
xC
, yC
, zC
.
2
2
2
14.
СКАЛЯРНОЕ И ВЕКТОРНОЕПРОИЗВЕДЕНИЯ ВЕКТОРОВ
15.
§3. Скалярное произведение векторовСкалярным произведением a b
векторов a и b называется
скаляр (число), равный произведению длин этих векторов на косинус
угла между ними:
a b a b cos .
Другое обозначение скалярного произведения:
a, b .
Если b a,
то a a a 2 a скалярный квадрат вектора.
2
Свойства скалярного произведения
a b 0 a b.
1. Если a 0, b 0, то
2.
a b b a.
3.
a b a прa b b прb a.
4.
( a b ) с (a с ) (b с ).
16.
Пример 1.Вычислить (a 3b ) (2a b ).
a 2, b 3, (a , b )
3
.
4
17.
Вычисление скалярного произведенияв ортонормированном базисе
Ортонормированный базис (ОНБ) – базис, в котором векторы
попарно ортогональны (перпендикулярны) и нормированы (длины
векторов равны 1).
В трехмерном пространстве ОНБ:
i , j, k.
(На плоскости ОНБ: i , j ).
Пусть
a a1i a2 j a3k , b b1i b2 j b3k .
Найдем скалярное произведение векторов, используя свойство
линейности:
18.
Таким образом, в ОНБ: a b a1b1 a2b2 a3b3 .Применения скалярного произведения
a b a b 0.
1. Проверка ортогональности ненулевых векторов:
2. Вычисление длины вектора:
a a a a2 .
a:
a {a1 , a2 , a3}: a a12 a22 a32 .
В ОНБ для
3. Отыскание угла между ненулевыми векторами
cos
a b
a b
.
19.
4. Вычисление направляющих косинусов вектора:a3
a1
a2
cos
, cos
, cos
a
a
a
, , - углы, которые образует вектор a с базисными векторами
i , j , k соответственно (или, что то же самое, с осями Ох, Оу, Оz).
Косинусы этих углов называются направляющими косинусами вектора a,
при этом
cos2 cos2 cos2 1 .
5. Вычисление проекции вектора на вектор
r
r ar Чb
r r r
пр b = r
(a , b №0).
a
6. Вычисление работы А постоянной силы F при прямолинейном
перемещении из точки М в точку N:
r
a
A F MN .
20.
Пример 2. Найти вектор c , коллинеарный вектору a {1,3,2},если его проекция на вектор b {2,1,0} равна
2 5 .
21.
§4. Векторное произведение векторовc
Понятие правой и левой тройки векторов
Упорядоченная тройка некомпланарных векторов
называется правой, если с конца третьего вектора
0
b
a
кратчайший поворот от первого вектора ко второму происходит против
часовой стрелки.
В противном случае тройка векторов называется левой.
На рис.
a, b , c правая тройка; b , a, c левая тройка.
Замечание
При перестановке местами двух соседних векторов ориентация этой тройки
меняется, т.е. правая тройка становится левой, а левая – правой. При круговой
перестановке векторов в тройке ориентация тройки не меняется, т.е. ориентации
троек (a, b , c ), (b , c , a ), (c , a, b ) одинаковы.
22.
Векторным произведением векторов a и b называется векторудовлетворяющий условиям
1. вектор c ортогонален векторам a и b ;
2. векторы a , b , c образуют правую тройку;
3. c a b sin , (a , b ).
Обозначение: a b или [a, b ].
Заметим, что длина вектора c равна площади параллелограмма,
построенного на векторах a и b .
Пример 1. Показать, что
i j k, i k j.
c,
23.
Аналогично,1.
2.
3.
j k i , k i j , k j i , j i k .
Свойства векторного произведения
a b 0 a b (a, b 0).
b a a b .
( a b) c (a c) (b c).
Из свойства линейности (3) следует, что при векторном умножении
можно раскрывать скобки, выносить числовой множитель, но нельзя
менять порядок сомножителей.
24.
Вычисление векторного произведенияв ортонормированном базисе
a a1i a2 j a3k , b b1i b2 j b3k .
Пусть в ОНБ:
Найдем векторное произведение векторов, используя свойство
линейности:
25.
Таким образом, в ОНБ:i
j
a b a1 a2
b1 b2
k
a3 .
b3
Применение векторного произведения
1. Вычисление площади параллелограмма S и площади
треугольника S∆, построенных на векторах a и b :
1
S a b , S a b .
2
2. Отыскание вектора c : c a, c b
c (a b ).
3. Вычисление момента m0 силы F , приложенной к точке М,
относительно точки О:
m0 ОМ F .
26.
4. Вычисление линейной скорости v точки М, вращающейся спостоянной угловой скоростью
w : v w OM .
27.
Пример 2. Найти вектор c , перпендикулярный векторам a 2i jи b 3 j k , если c 3 41 и вектор c образует тупой угол с осью Oz.
28.
Пример 2. Найти вектор c , перпендикулярный векторам a 2i jи b 3 j k , если c 3 41 и вектор c образует тупой угол с осью Oz.