








 Электроника
ЭлектроникаПохожие презентации:









")
Синтез линейных стационарных автоматических систем
1.
Автоматика и управлениеТема 7. Синтез линейных
стационарных автоматических
систем
ПЗ 10 Синтез последовательного корректирующего
устройства ЛСС. ПИД - регулятор.
2.
Задача №1Передаточная функция разомкнутой системы имеет вид:
K
W( p ) 2 2
.
T p 2T p 1
~
Определить значения параметров системы, при которых
коэффициент статизма S0=0,02, время регулирования tp 0,3c
и перерегулирование hm 10%.
Решение:
1
S0
,
1 K
1 S0
K
.
S0
Метод стандартных
коэффициентов (МСК)
n
n pi
i 1
3.
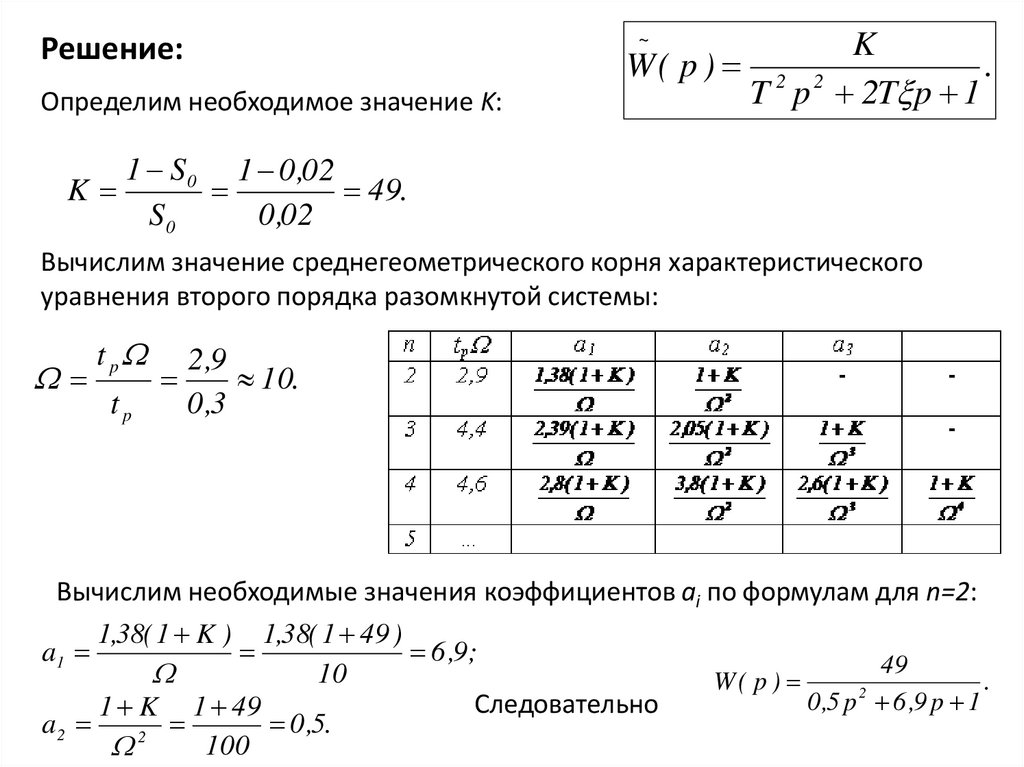
Решение:Определим необходимое значение K:
K
W( p ) 2 2
.
T p 2T p 1
~
1 S 0 1 0 ,02
K
49.
S0
0 ,02
Вычислим значение среднегеометрического корня характеристического
уравнения второго порядка разомкнутой системы:
t p
tp
2 ,9
10.
0 ,3
Вычислим необходимые значения коэффициентов ai по формулам для n=2:
1,38( 1 K ) 1,38( 1 49 )
a1
6 ,9;
49
10
W( p )
.
2
0
,
5
p
6
,
9
p
1
Следовательно
1 K 1 49
a2
0
,
5
.
100
2
4.
KW( p ) 2 2
.
T p 2T p 1
~
W( p )
49
.
2
0 ,5 p 6 ,9 p 1
Составим алгебраическое уравнение, приравняв коэффициенты ~при
одинаковых степенях p характеристических полиномов W(p) и W ( p )
T2p2+2T p+1=0,5p2+6,9p+1
T2=0,5;
2T =6,9;
T=0,7;
6 ,9 6 ,9
5.
=
2T 1,4
Ответ: K=49; T 0,7; =5
5.
Задача 2Передаточная функция разомкнутой АС имеет вид:
K
W( p )
.
p( Tp 1 )
Выбрать K и T так, чтобы время регулирования tp 0,5c, а перерегулирование
hm 15%
~
Решение:
Задано время регулирование tp. Вычисляется = tp /tp , где произведение
tp выбирается из табл. при известном порядке синтезируемой системы n.
K определяется из той же таблицы.
Определим значение
коэффициента усиления K
n=2; tp =2,9
2 ,9 2 ,9
5 ,8.
t p 0 ,5
K
1,38
5 ,8
4 ,2.
1,38
6.
~W( p )
K
.
p( Tp 1 )
Коэффициент a2 определим по формуле таблицы
a2
1
1
0 ,125.
1,38 1,38 5 ,8
Ответ: W ( p )
4 ,2
; T=0,125c
p( 0 ,125 p 1 )
7.
Задача №3Задана структурная схема стабилизации гироскопического устройства
ЗАД
W1(s)
Wкз(s)
W3(s)
Y (t )
W2(s)
W1 (s) k1
ПАРАМЕТРЫ
k1
k2
k3
T3 , с
1-10 вариант
1
0,5
1,2
10
1
W2 (s) k2 s
2
0,55
1,4
12
1
3
0,6
1,6
14
1
W3 ( s)
k3
s(T32 s 2 2T3 s 1)
НОМЕРА ЗАДАНИЙ
4
5
6
7
0,65 0,7
0,75 0,8
1,8
2
1,2
1,4
16
18
20
22
1
1
1,2
1,2
0,8 11-20 вариант
0,4
8
0,85
1,6
24
1,2
9
0,9
1,8
26
1,2
21-30 вариант
10
0,95
2
28
1,2
0,6
8.
Синтезировать передаточную функцию последовательногокорректирующего звена так, чтобы система стабилизации
гироскопического
устройства
обладала
следующими
свойствами и показателями качества:
- ошибкой стабилизации
0,01
- перерегулированием
max 20%
- временем переходного процесса
t р 0,1 0,2 с
Построить переходной процесс скорректированной
системы стабилизации и показать, что система
удовлетворяет заданным требованиям
9.
Синтез желаемой ЛАХ1
S0
K 1
1 S0
K
S0
e(t )
S1 (1)
xmax (t )
1
K
S1
(1)
xmax
K
e( t )
L(1) = 20lgKж
3=(2 .. 4) с
2 0,1 3
сtp
12
10
8
6
4
2
0
5
10
15
20
25
30
hm ,%
10.
Настройка ПИД-регулятора по методу Зиглера-Никольса1. Выставляем все коэффициенты (Kp, Ki,
Kd) в 0.
2. Начинаем постепенно увеличивать
значение Kp и следим за реакцией
системы. Нам нужно добиться, чтобы в
системе начались устойчивые колебания
(вызванные перерегулированием).
Увеличиваем Kp, пока колебания
системы не стабилизируются
(перестанут затухать).
3. Запоминаем текущее значение Kp
(обозначим его Ku) и замеряем период
колебаний системы (Tu).
Все. Теперь используем полученные
значения Ku и Tu для расчета всех
параметров ПИД регулятора по
формулам:
Kp = 0.6 * Ku
Ki = 2 * Kp / Tu
Kd = Kp * Tu / 8