





















 Физика
ФизикаПохожие презентации:







")


Физические основы механики
1. Физические основы механики
Семестр 12. Механические колебания
3.
Лекция № 51. Равновесия устойчивое, неустойчивое, безразличное.
2. Модель гармонического осциллятора.
3. Свободные незатухающие колебания.
3.1. Пружинный маятник.
3.2. Математический маятник.
4. Сложение гармонических колебаний.
4.1. Метод векторных диаграмм.
5. Свободные затухающие колебания
5.1. Дифференциальное уравнение
5.2. Основные характеристики колебаний
6. Вынужденные колебания
6.1. Дифференциальное уравнение
6.2. Амплитуда и фаза
6.3. Резонанс и резонансные кривые.
4.
Колебаниями называются движения или процессы,которые характеризуются определенной
повторяемостью во времени.
Колебательные процессы широко распространены в
природе и технике (качание маятника часов,
переменный электрический ток и т.д.).При колебательном движении маятника изменяется координата его
центра масс, в случае переменного тока колеблются
напряжение и ток в цепи. Физическая природа колебаний может быть разной, поэтому различают колебания
механические, электромагнитные и др. Однако различные колебательные процесс описываются одинаковыми
характеристиками и одинаковыми уравнениями.
Отсюда следует целесообразность единого подхода к
изучению колебаний различной физической природы.
5.
Примеры колебательных процессовПоперечная волна в сетке,
состоящей
из
шариков,
скреплённых
пружинками.
Колебания масс происходят
перпендикулярно направлению
распространения волны.
Возможные типы колебаний
атомов в кристалле.
5
6.
Примеры колебательных процессовКруговая
волна
на
поверхности
жидкости,
возбуждаемая
точечным
источником (гармонически
колеблющимся шариком).
Генерация акустической
волны громкоговорителем.
6
7.
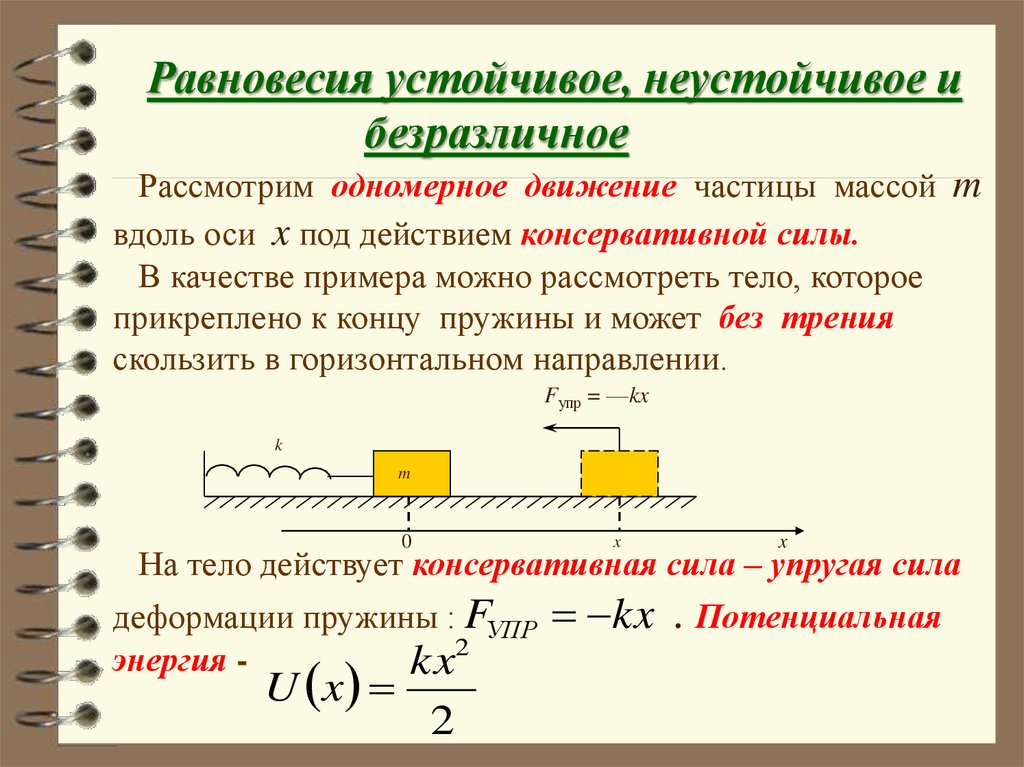
Равновесия устойчивое, неустойчивое ибезразличное
Рассмотрим одномерное движение частицы массой m
вдоль оси x под действием консервативной силы.
В качестве примера можно рассмотреть тело, которое
прикреплено к концу пружины и может без трения
скользить в горизонтальном направлении.
Fупр = —kx
k
m
0
x
x
На тело действует консервативная сила – упругая сила
деформации пружины : FУПР
энергия kx2
U x
2
kx . Потенциальная
8.
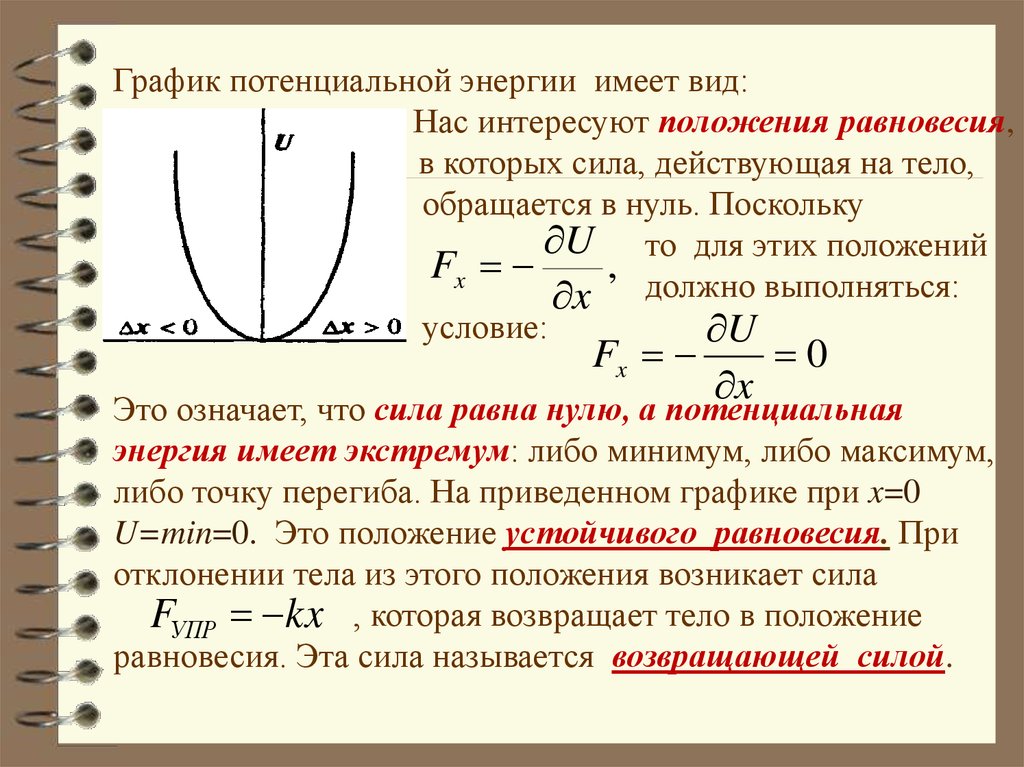
График потенциальной энергии имеет вид:Нас интересуют положения равновесия,
равновесия, в кото в которых сила, действующая на тело,
обращается в нуль. Поскольку
U то для этих положений
Fx
, должно выполняться:
x
условие:
U
Fx
x
0
Это означает, что сила равна нулю, а потенциальная
энергия имеет экстремум: либо минимум, либо максимум,
либо точку перегиба. На приведенном графике при x=0
U=min=0. Это положение устойчивого равновесия. При
отклонении тела из этого положения возникает сила
FУПР kx , которая возвращает тело в положение
равновесия. Эта сила называется возвращающей силой.
9.
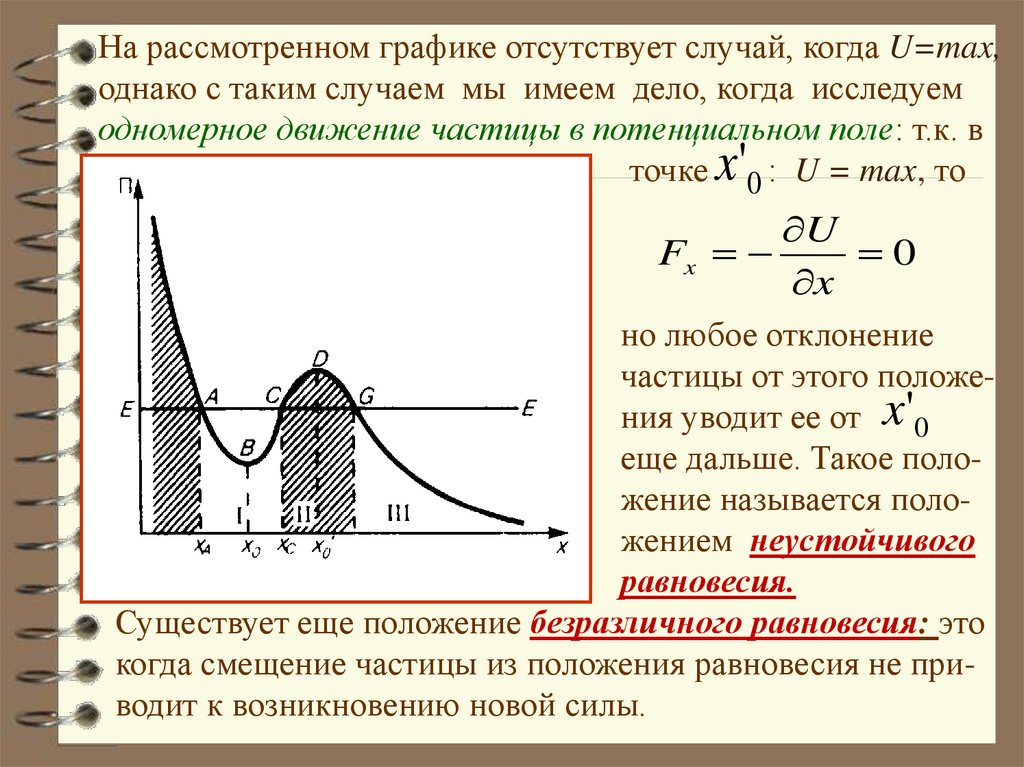
На рассмотренном графике отсутствует случай, когда U=max,однако с таким случаем мы имеем дело, когда исследуем
одномерное движение частицы в потенциальном поле: т.к. в
точке 0 : U = max, то
есть
x'
U
Fx
0
x
но любое отклонение
частицы от этого положения уводит ее от x'0
еще дальше. Такое положение называется положением неустойчивого
равновесия.
Существует еще положение безразличного равновесия: это
когда смещение частицы из положения равновесия не приводит к возникновению новой силы.
10.
Колебания могут происходить только около положенияустойчивого равновесия, где Fx 0 , а U min 0 .
Проанализируем процесс колебаний с позиции
потенциальной энергии. Разложим функцию U(x) по
степеням x, причем ограничимся рассмотрением малых
колебаний ( x - мало), то есть высшими степенями x можно
пренебречь. По формуле Маклорена:
1
2
U x U (0) U (0) x U (0) x ....
2
U 0 0 наш выбор,
U (0) 0
экстремум функции,
U 0 0 минимальное значение функции.
11.
В результате потенциальная энергия принимает вид:1
1 2
2
U x U (0) x kx
2
2
где
k U 0 0
,
.
Найдем силу, действующую на частицу:
U
Fx
kx
x
Это выражение тождественно выражению для упругой
силы. Поэтому силы такого вида независимо от их природы
называются квазиупругими. Она направлена к положению
устойчивого равновесия, то есть является возвращающей
силой.
12.
Модель гармонического осциллятораКолебания называются свободными (или собственными),
если они совершаются за счет первоначально сообщенной
энергии при последующем отсутствии внешних
воздействий на колебательную систему (систему,
совершающую колебания). Простейшим типом колебаний
являются гармонические колебания - колебания, при
которых колеблющаяся величина изменяется со временем
по закону синуса (косинуса).
Пусть материальная точка совершает прямолинейные
гармонические колебания вдоль оси координат x около
положения устойчивого равновесия, принятого за
начало координат.
13.
xТогда зависимость координаты
от времени
описываются уравнением следующего вида:
x A cos( 0t 0 )
где
A
0
0
- амплитудой колебания, максимальное
значение колеблющейся величины,
- круговая (циклическая) частота,
- начальная фаза колебания в момент времени
t 0
( 0t 0 ) - фаза колебания в момент времени t
Так как косинус изменяется в пределах от +1 до -1, то
может принимать значения от
A
до
A
.
x
14.
1415.
1516.
График этой функции для случаяпредставлен на рисунке
x Acos( 0t )
17.
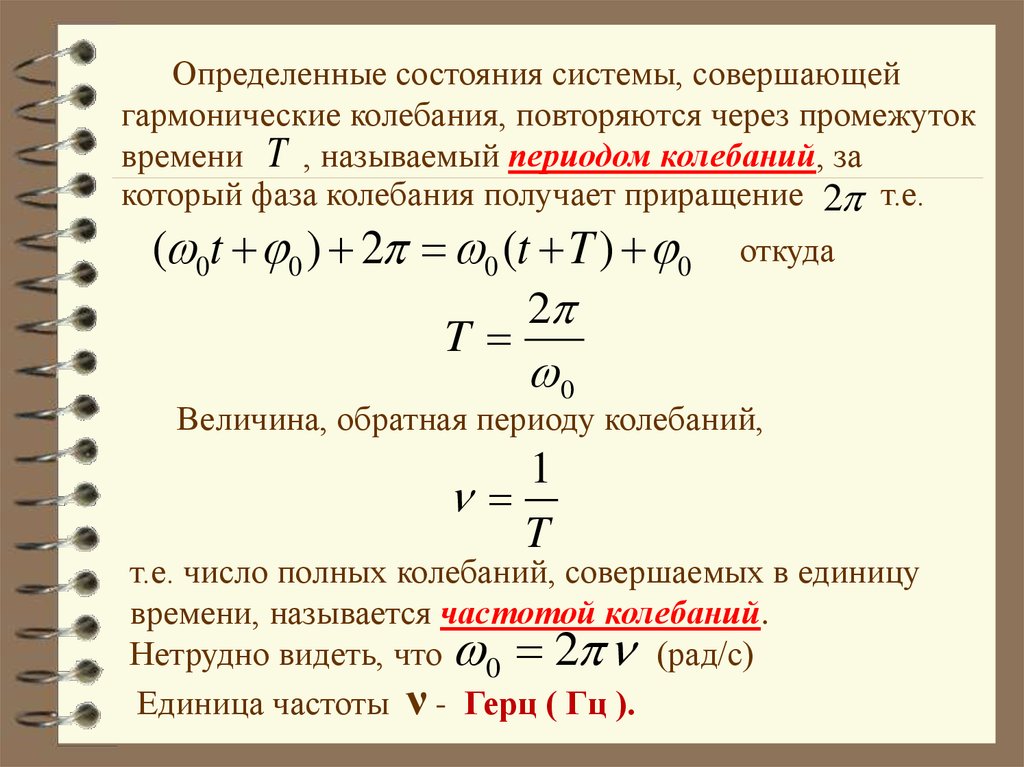
Определенные состояния системы, совершающейгармонические колебания, повторяются через промежуток
времени T , называемый периодом колебаний, за
который фаза колебания получает приращение 2 т.е.
( 0t 0 ) 2 0 (t T ) 0
2
T
0
откуда
Величина, обратная периоду колебаний,
1
T
т.е. число полных колебаний, совершаемых в единицу
времени, называется частотой колебаний.
Нетрудно видеть, что 0 2 (рад/с)
Единица частоты ν - Герц ( Гц ).
18.
Найдем дифференциальное уравнение, котороеописывает гармонические колебания. Для этого вычислим
производные функции x A cos( 0t 0 ) по
времени.
Первая производная по времени:
dx
x
A 0 sin( 0t 0 )
dt
2
Вторая производная по времени:
d x
2
2
x 2 A 0 cos( 0t 0 ) 0 x
dt
Из сравнения полученных выражений следует
дифференциальное уравнение гармонических колебаний:
2
d x
2
x
0
0
2
dt
- уравнение гармонического
осциллятора без затухания
19.
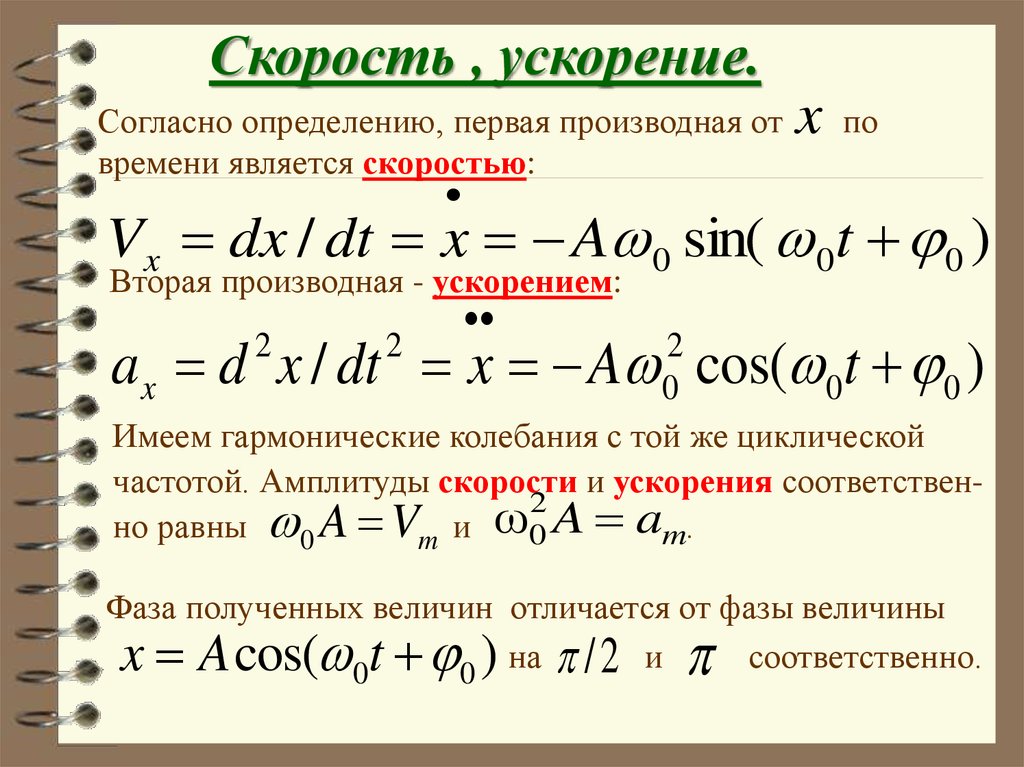
Скорость , ускорение.Согласно определению, первая производная от
времени является скоростью:
x
по
Vx dx / dt x A 0 sin( 0t 0 )
Вторая производная - ускорением:
2
2
2
x
0
0
0
Имеем гармонические колебания с той же циклической
частотой. Амплитуды скорости и ускорения соответствен2
но равны 0 A Vm и ω0 A am.
a d x / dt x A cos( t )
Фаза полученных величин отличается от фазы величины
соответственно.
x A cos( 0t 0 ) на / 2 и
20.
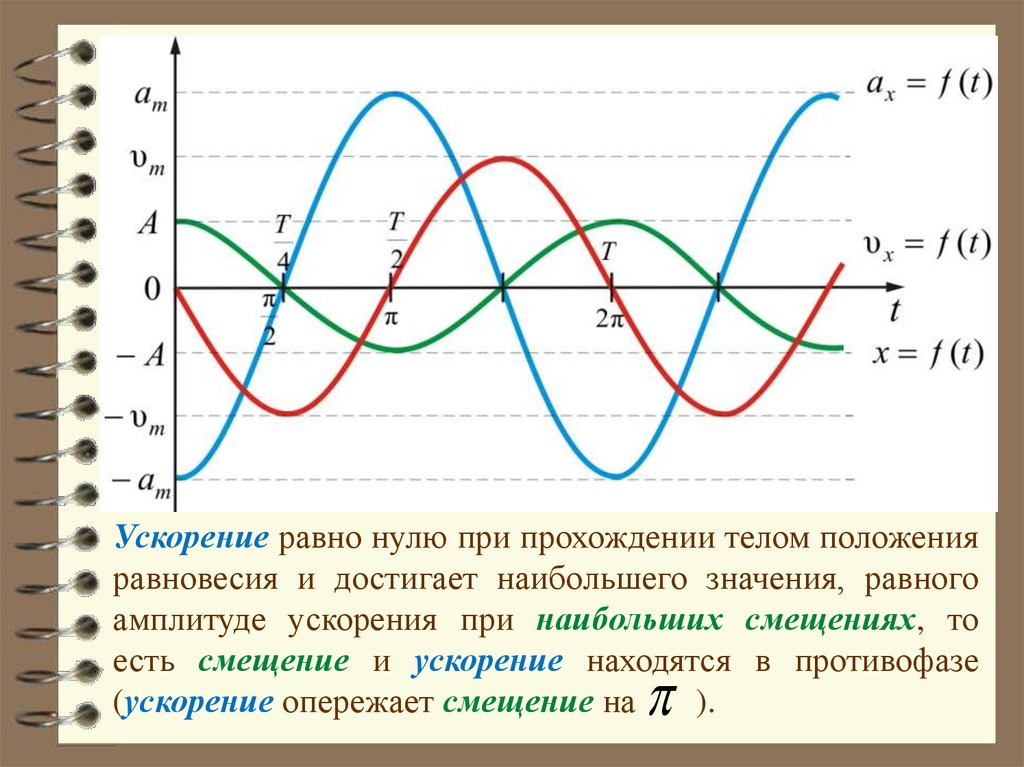
Рассмотрим графикиx , x , ax
При максимальном смещении ( x A ) скорость равна
нулю.
Скорость колебаний тела максимальна и равна амплитуде
скорости в момент прохождения через положение
равновесия ( x 0 ), то есть скорость опережает
смещение на / 2
21.
Ускорение равно нулю при прохождении телом положенияравновесия и достигает наибольшего значения, равного
амплитуде ускорения при наибольших смещениях, то
есть смещение и ускорение находятся в противофазе
(ускорение опережает смещение на
).
22.
Основное уравнение динамики гармоническихколебаний
Исходя из второго закона,
F ma , можно записать:
Fx m 02 Acos( 0t 0 ) m 02 x (1)
сила F пропорциональна х и всегда направлена
к
положению равновесия ( поэтому ее и называют
возвращающей силой ).
Период и фаза силы совпадают с периодом и фазой
ускорения.
Примером сил, удовлетворяющих (1) являются упругие
силы. Силы же имеющие иную природу, но
удовлетворяющие (1), называются квазиупругими.
Квазиупругая сила F kx,
x
где k – коэффициент квазиупругой силы.
23.
k2
ω0
m
Сравнивая , видим, что
d2 x
ax 2
dt
Получим основное уравнение динамики гармонических
колебаний, вызываемых упругими силами:
2
d x
m 2 ; kx
dt
2
2
;
d x
m 2 kx 0;
dt
d x
2
ω
x
0
0
2
dt
2
d x k
x 0
2
m
dt
Основное уравнение
динамики гармонических
колебаний (гармонического осциллятора)
Решение этого уравнения всегда будет выражение вида:
x A cos( 0t 0 )
24.
Круговая частота колебанийкак
2
ω0
k
m
, то
2π
ω0
T
2
k
0
T
, но так
m
Период колебаний груза на пружине:
m
T 2
k
25.
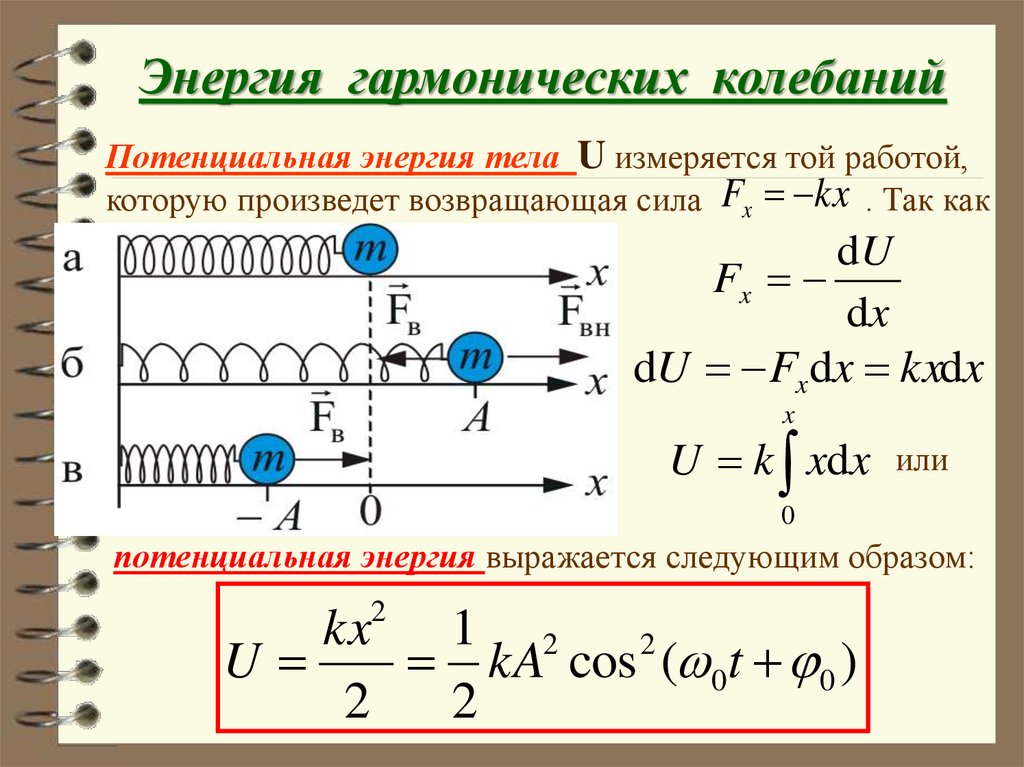
Энергия гармонических колебанийПотенциальная энергия тела U измеряется той работой,
которую произведет возвращающая сила Fx kx . Так как
dU
Fx
dx
dU Fx dx kxdx
, то
x
U k xdx
,
или
0
потенциальная энергия выражается следующим образом:
2
kx
1 2
2
U
kA cos ( 0t 0 )
2
2
26.
или1 2
U kA 1 cos 2( 0t 0 )
4
Кинетическая энергия
m
kA
2
K
sin ( 0t 0 )
2
2
2
или
2
2
kA
1 cos 2( 0t 0 )
K
4
Из формул, приведенных в рамках следует, что U и K
изменяются с частотой 2 0 , которая в два раза
превышает частоту гармонического колебания.
27.
Сложив выражения для U и K, получим формулу дляполной энергии:
1 2 mA
E K U kA
const
2
2
2
2
0
Полная энергия остается постоянной, так как при
гармонических колебаниях справедлив закон сохранения
механической энергии, поскольку упругая сила
консервативна.
На рисунках представлены графики зависимости
и K от времени.
x, U
28.
Из графиков видно, чтопроисходит переход
кинетической энергии в
потенциальную и наоборот,
но их сумма в любой
момент времени
постоянна.
Из ранее полученных формул
для U и K (а также
учитывая, что
1
sin cos
2
2
2
следует:
E
K U
2
29.
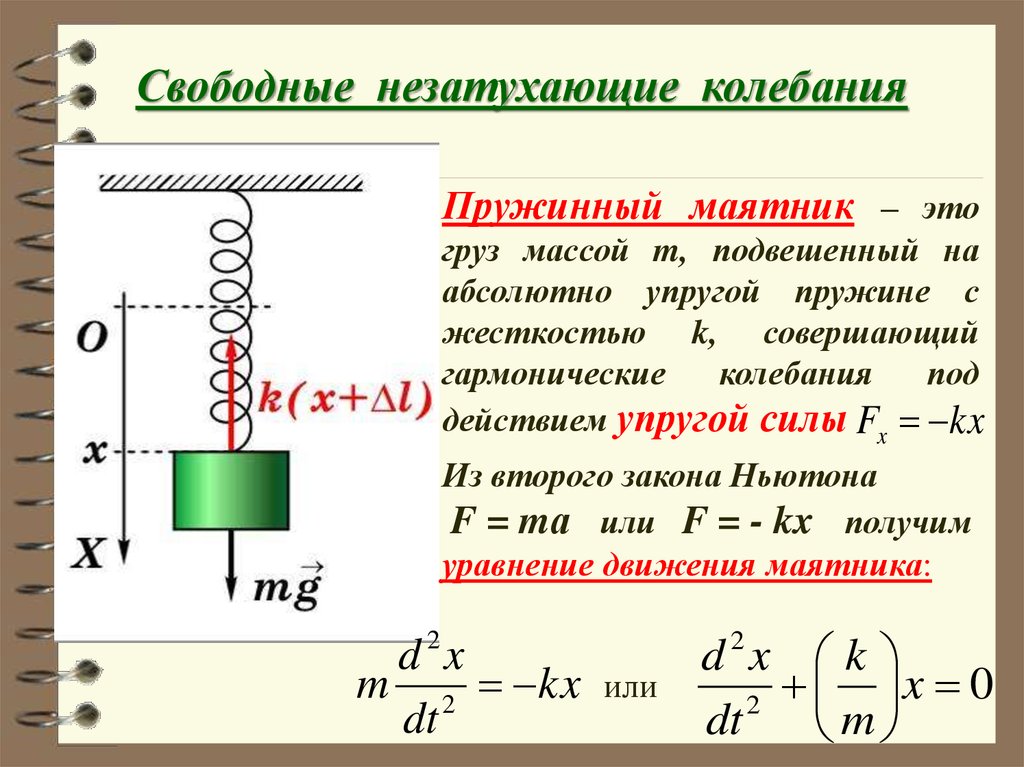
Свободные незатухающие колебанияПружинный маятник – это
груз массой m, подвешенный на
абсолютно упругой пружине с
жесткостью k, совершающий
гармонические
колебания
под
действием упругой силы Fx kx
Из второго закона Ньютона
F = mа или F = - kx получим
уравнение движения маятника:
2
d x
m 2 kx
dt
d x k
x 0
2
dt
m
2
или
30.
Решение этого уравнения – гармонические колебания вида:x A cos( 0t 0 )
циклическая частота
период
k
ω0
;
m
m
T 2
k
31.
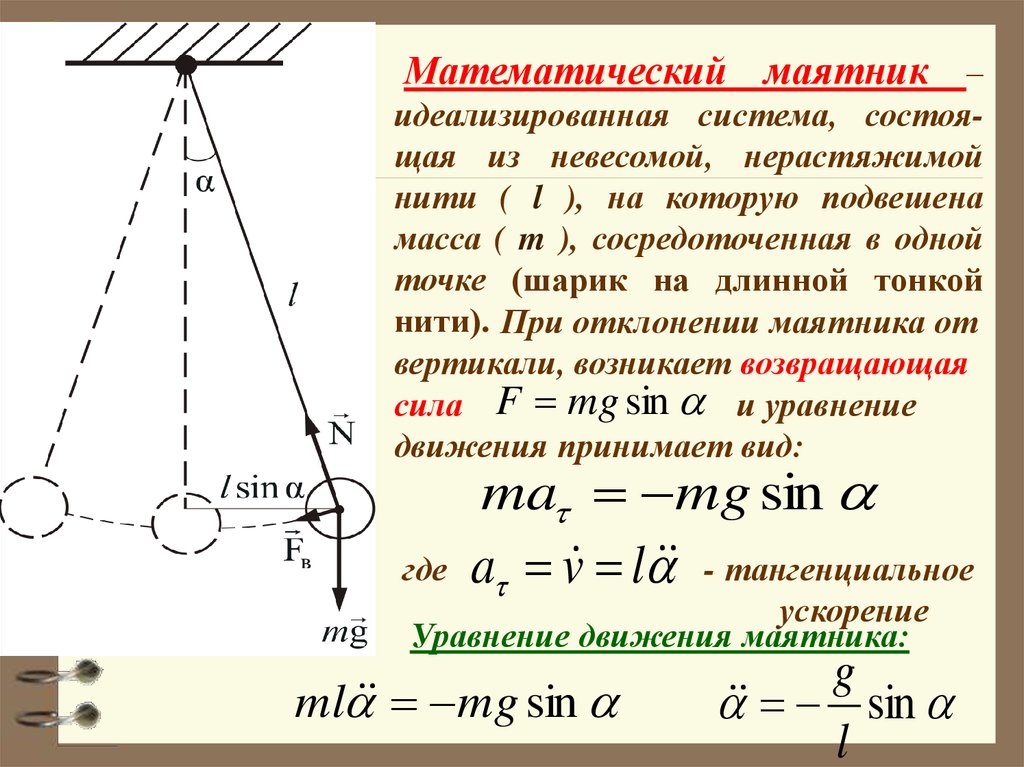
Математический маятник –идеализированная система, состоящая из невесомой, нерастяжимой
нити ( l ), на которую подвешена
масса ( m ), сосредоточенная в одной
точке (шарик на длинной тонкой
нити). При отклонении маятника от
вертикали, возникает возвращающая
сила F mg sin и уравнение
движения принимает вид:
где
ma mg sin
a v l - тангенциальное
ускорение
Уравнение движения маятника:
ml mg sin
g
sin
l
32.
Так как рассматриваются только малые отклонения( sin ), уравнение движения маятника:
g
0
l
Решение этого уравнения - гармонические
колебания: A cos( t )
0
g
с частотой
;
0
l
периодом
0
l
T 2
g
33.
34.
СЛОЖЕНИЕ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙОДНОГО НАПРАВЛЕНИЯ И ОДИНАКОВОЙ
ЧАСТОТЫ
Колеблющееся тело может участвовать в нескольких
колебательных процессах. Тогда необходимо найти
результирующее колебание, иными словами, колебания
необходимо сложить. Сложим гармонические колебания
одного направления и одинаковой частоты:
x1 A1 cos( 0t 1 )
x2 A2 cos( 0t 2 )
Для этого воспользуемся геометрическим способом –
методом векторных диаграмм
35.
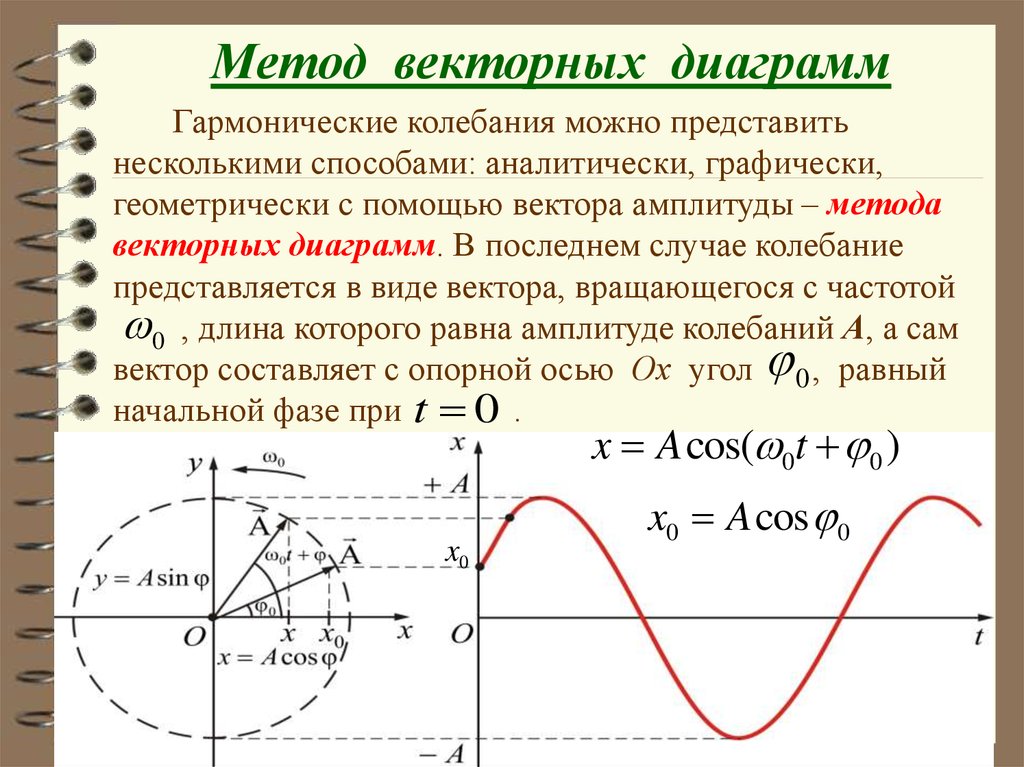
Метод векторных диаграммГармонические колебания можно представить
несколькими способами: аналитически, графически,
геометрически с помощью вектора амплитуды – метода
векторных диаграмм. В последнем случае колебание
представляется в виде вектора, вращающегося с частотой
0 , длина которого равна амплитуде колебаний А, а сам
вектор составляет с опорной осью Ох угол 0 , равный
начальной фазе при t 0 .
x A cos( 0t 0 )
x0
x0 A cos 0
36.
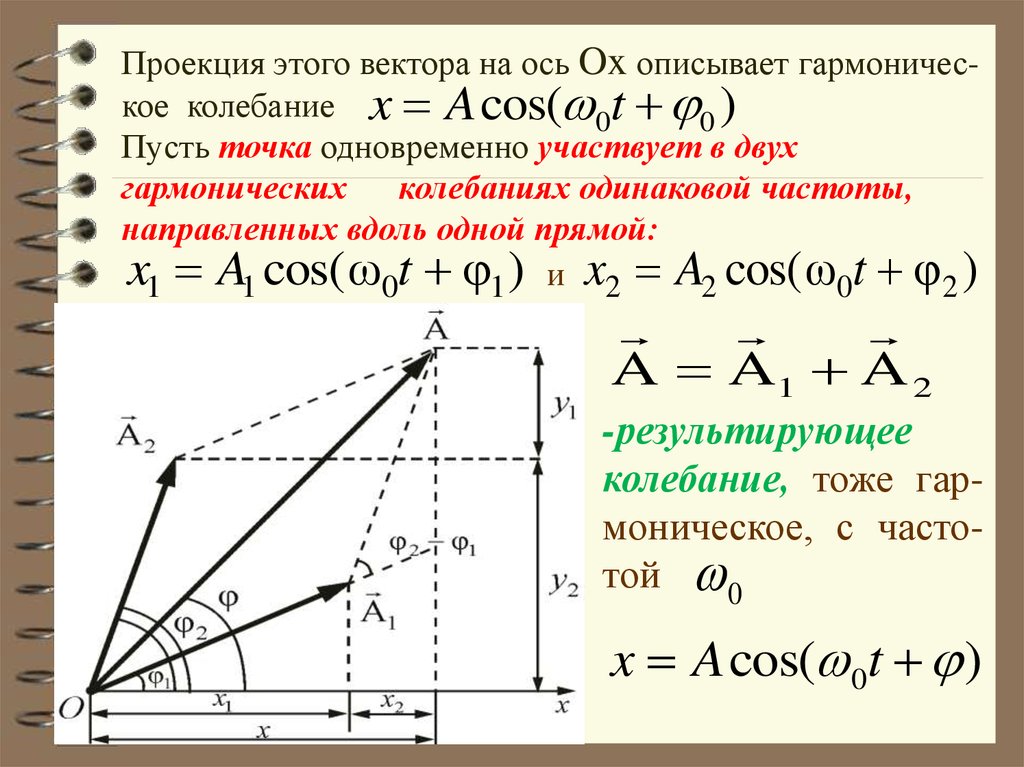
Проекция этого вектора на ось Ox описывает гармоническое колебание x A cos( 0t 0 )Пусть точка одновременно участвует в двух
гармонических
колебаниях одинаковой частоты,
направленных вдоль одной прямой:
x1 A1 cos( ω0t φ1 ) и x2 A2 cos( ω0t φ 2 )
A A1 A 2
-результирующее
колебание, тоже гармоническое, с частотой 0
x A cos( 0t )
37.
По правилу сложения векторов найдемамплитуду, результирующего колебания:
A
2
2
A1
2
A2
суммарную
2 A1 A2 cos( φ 2 φ1 )
Амплитуда А результирующего колебания зависит от
разности начальных фаз. Их разность фаз не зависит от
времени: φ 2 φ1 const
Такие два колебания называются когерентными.
Начальная фаза результирующего колебания определяется
из соотношения:
A1 sin 1 A2 sin 2
tg
A1 cos 1 A2 cos 2
38.
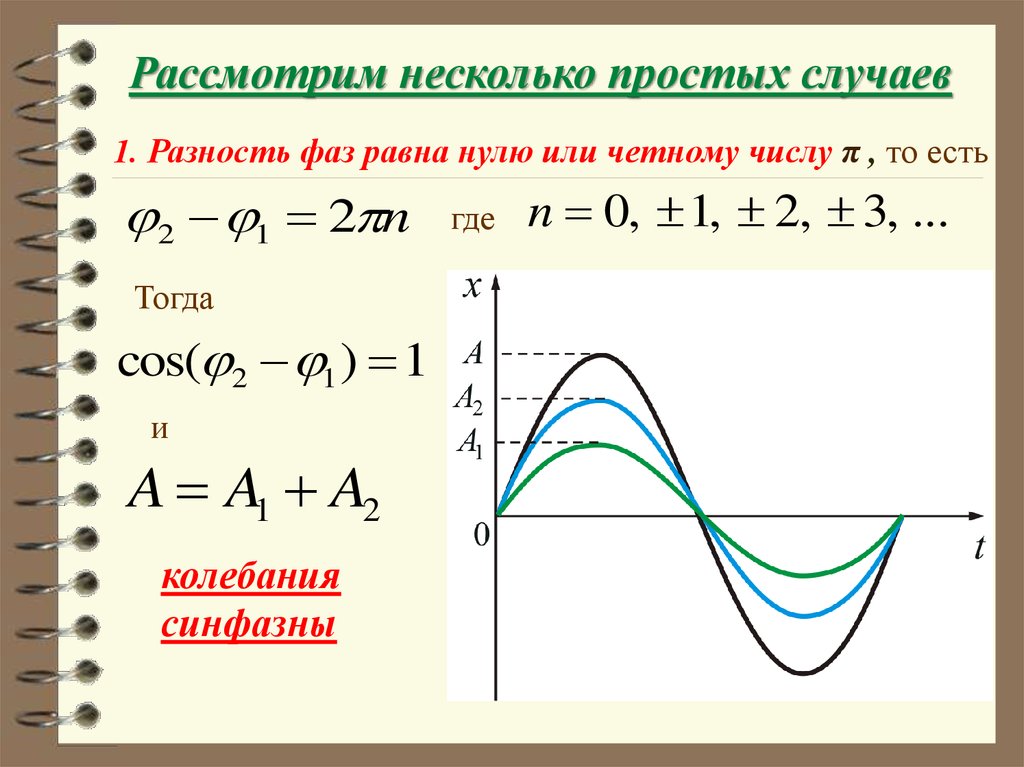
Рассмотрим несколько простых случаев1. Разность фаз равна нулю или четному числу π , то есть
2 1 2 n
Тогда
cos( 2 1 ) 1
и
A A1 A2
колебания
синфазны
где
n 0, 1, 2, 3, ...
39.
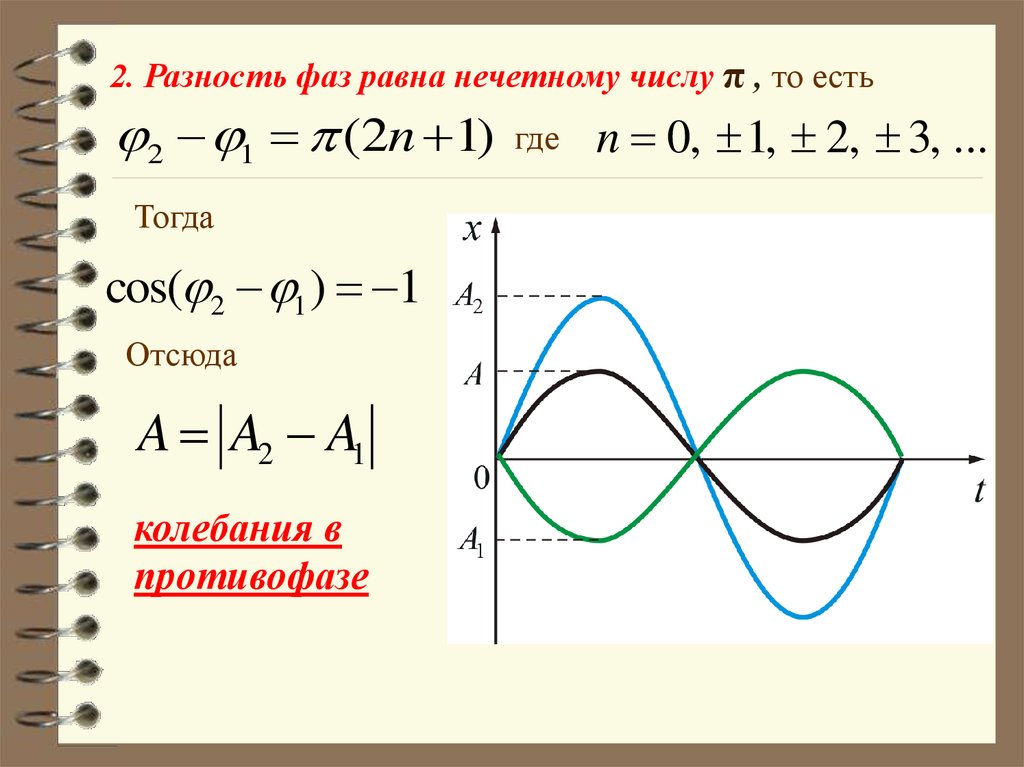
2. Разность фаз равна нечетному числу π , то есть2 1 (2n 1)
Тогда
cos( 2 1 ) 1
Отсюда
A A2 A1
колебания в
противофазе
где
n 0, 1, 2, 3, ...
40.
Свободные затухающие механическиеколебания
Все реальные колебания являются затухающими.
Энергия
механических
колебаний
постепенно
расходуется на работу против сил трения и амплитуда
колебаний уменьшается.
Сила трения (или
сопротивления):
Fупр = —kx
Fтр r
v
k
m
X
x
0
Fсопр
v
где r – коэффициент
сопротивления
υ – скорость
движения
41.
Второй закон Ньютона для затухающих прямолинейныхколебаний вдоль оси
x:
max kx r x
где kx – возвращающая сила,
r x
– сила трения.
После несложных преобразований имеем:
r
k
x x x 0
m
m
Введем обозначения:
квадрат
k
2 собственной
0 частоты
m
незатухающих
колебаний
r
2m
коэффициент
затухания
42.
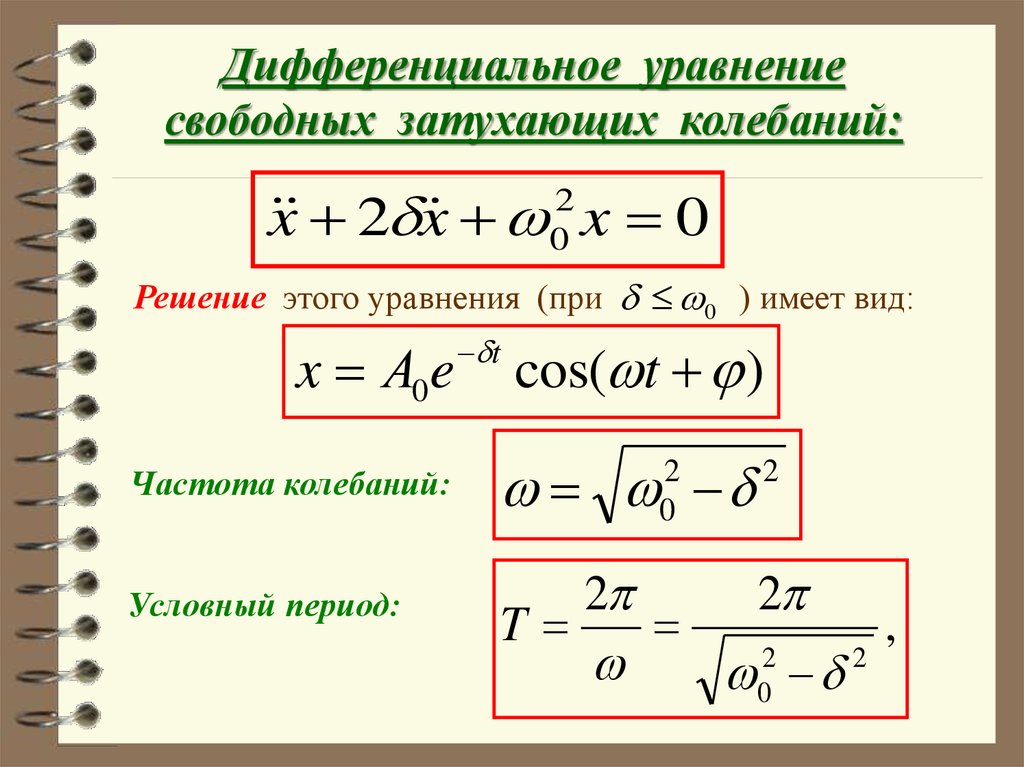
Дифференциальное уравнениесвободных затухающих колебаний:
x 2 x x 0
2
0
Решение этого уравнения (при 0 ) имеет вид:
x А0 e
Частота колебаний:
Условный период:
t
cos( t )
2
0
T
2
2
2
2
0
2
,
43.
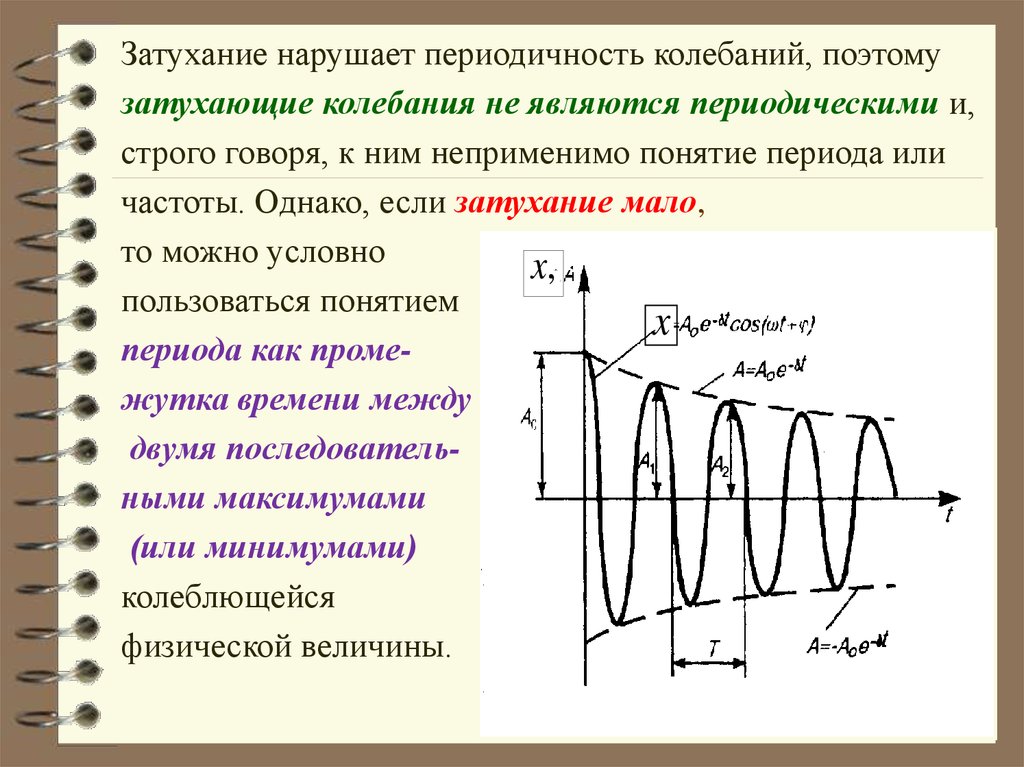
Затухание нарушает периодичность колебаний, поэтомузатухающие колебания не являются периодическими и,
строго говоря, к ним неприменимо понятие периода или
частоты. Однако, если затухание мало,
то можно условно
x,
пользоваться понятием
x
периода как промежутка времени между
двумя последовательными максимумами
(или минимумами)
колеблющейся
физической величины.
44.
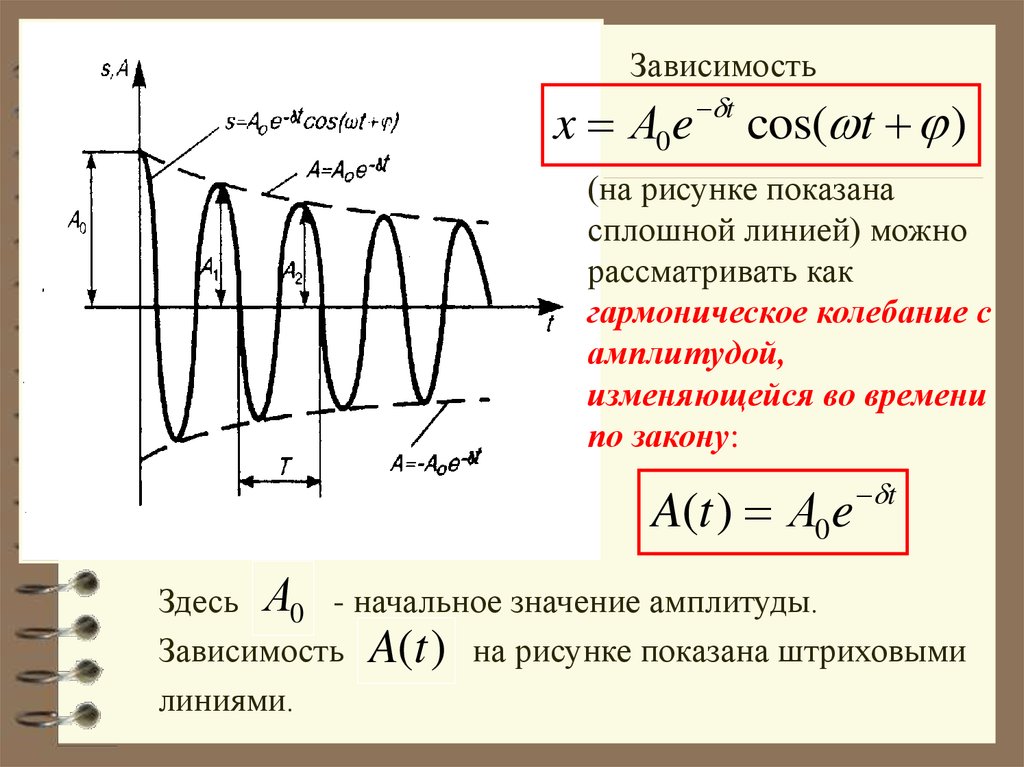
Зависимостьx А0 e
t
cos( t )
(на рисунке показана
сплошной линией) можно
рассматривать как
гармоническое колебание с
амплитудой,
изменяющейся во времени
по закону:
A(t ) А0 e
t
Здесь А0 - начальное значение амплитуды.
Зависимость A(t ) на рисунке показана штриховыми
линиями.
45.
Основные параметры (характеристики)затухающих колебаний
Время релаксации - время, за которое амплитуда
уменьшается в
раз.
e
A0
e e e
A0
Последнее выражение дает:
тогда
1/
1/
Следовательно, коэффициент затухания
– есть
физическая величина, обратная времени, в течение
которого амплитуда уменьшается в
е = 2,7
раз.
46.
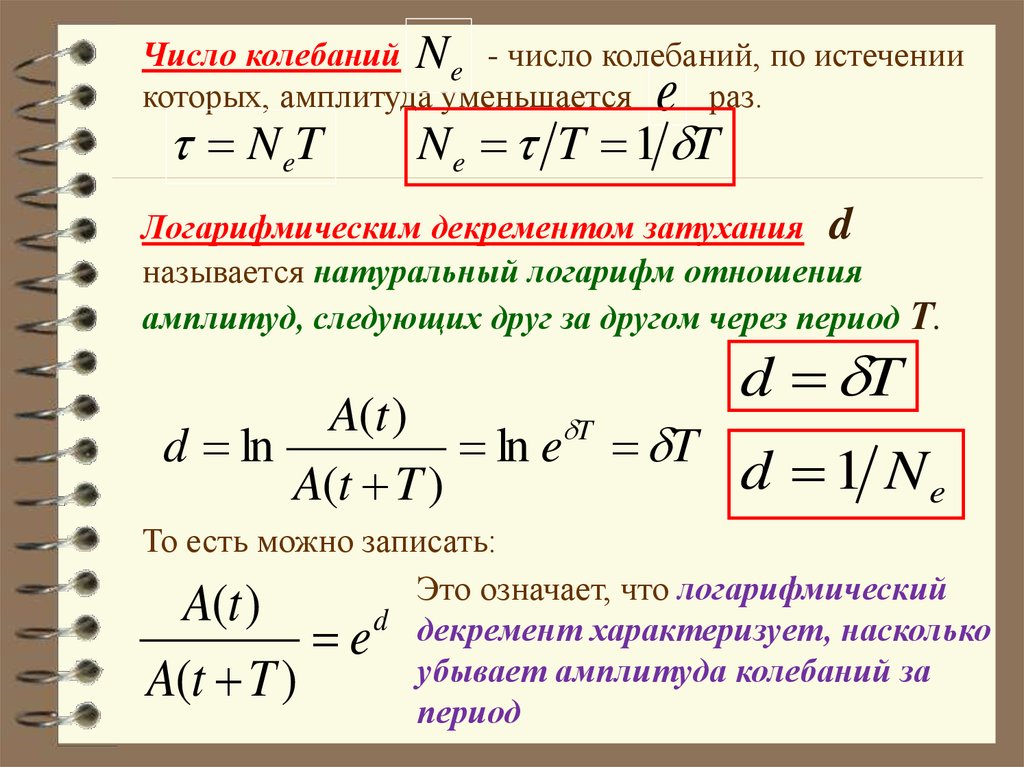
Число колебаний N e - число колебаний, по истечениикоторых, амплитуда уменьшается
раз.
N eT
e
N e T 1 T
Логарифмическим декрементом затухания d
называется натуральный логарифм отношения
амплитуд, следующих друг за другом через период Т.
d T
A(t )
T
d ln
ln e T
d 1 Ne
A(t T )
То есть можно записать:
Это означает, что логарифмический
A(t )
d декремент характеризует, насколько
e
убывает амплитуда колебаний за
A(t T )
период
47.
Добротность Q является важнейшей характеристикойколебательной системы, которая при малых значениях
коэффициента затухания равна
0
Q Ne
d
T0 2
(так как затухание мало (
равным T0 ).
Для определения физического смысла добротности
рассмотрим, как изменяется энергия колебаний.
Полная энергия складывается из кинетической энергии и
потенциальной: E = K + U
2
2
0 ), то T принято
1
1 2
2
E mx kx
2
2
48.
При малом затухании:1
2 2 t
E kA0 e
2
Среднее значение энергии за период:
T
T
1
1 1 2 2 t
1 2 2 t
E Edt kA0 e dt kA0 e
T0
T02
2
Средняя энергия, которая теряется в единицу времени:
d
1 2
2 t
E kA0 2 e
2 E
dt
2
Тогда убыль энергии за период:
d
EТ E T 2 T E
dt
49.
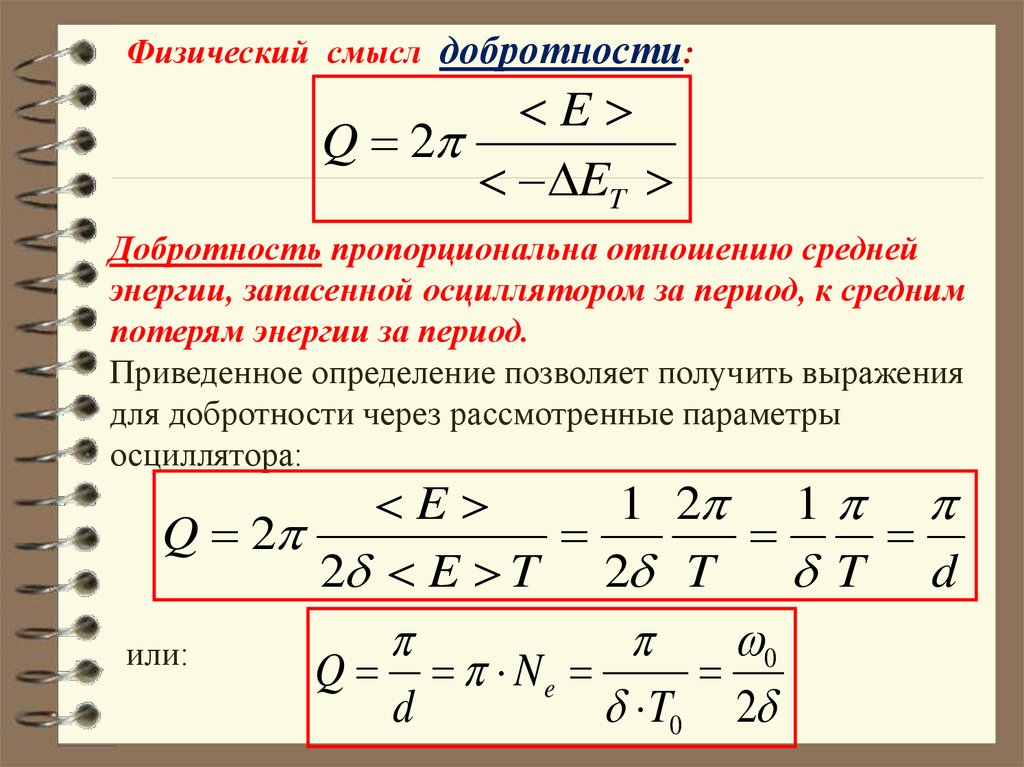
Физический смысл добротности:E
Q 2
EТ
Добротность пропорциональна отношению средней
энергии, запасенной осциллятором за период, к средним
потерям энергии за период.
Приведенное определение позволяет получить выражения
для добротности через рассмотренные параметры
осциллятора:
E
1 2 1
Q 2
2 E T 2 T
T d
0
или:
Q Ne
d
T0 2
50.
Вынужденные колебания гармоническогоосциллятора
Чтобы в реальной колебательной системе получить
незатухающие колебания, надо компенсировать потери
энергии. Такая компенсация возможна с помощью какоголибо периодически действующего фактора X (t ) ,
изменяющегося по гармоническому закону:
X (t ) X 0 cos( t )
Если рассматривать механические колебания, то роль
X (t ) играет внешняя вынуждающая сила
F (t ) F0 cos( t )
51.
Дифференциальное уравнение вынужденных колебанийпод действием гармонической силы
Рассмотрим систему, на которую кроме упругой силы (– kx)
и сил сопротивления (–rυx) действует добавочная
периодическая сила Fx – вынуждающая сила:
max kx r x Fx
– основное уравнение колебательного процесса при
вынужденных колебаниях с силой: F F cos t.
x
0
С учетом обозначений для собственной частоты колебаний
системы и коэффициента затухания приходим к уравнению:
F0
x 2 x x
cos t
m
2
0
52.
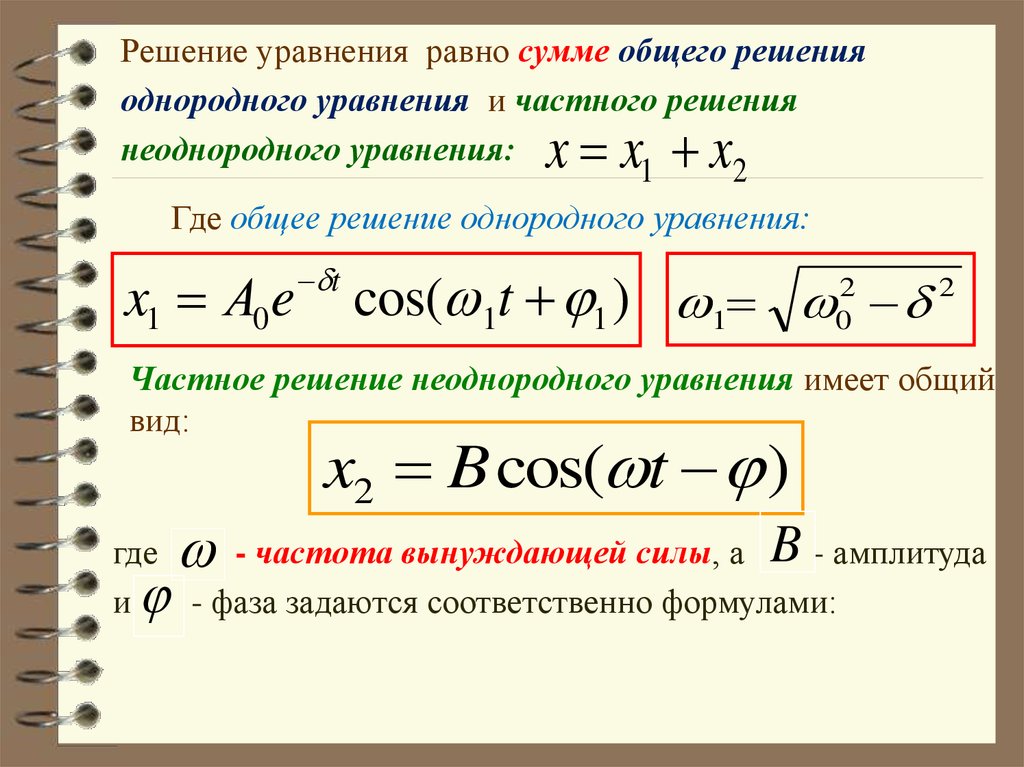
Решение уравнения равно сумме общего решенияоднородного уравнения и частного решения
неоднородного уравнения:
1
2
Где общее решение однородного уравнения:
x x x
x1 А0 e
t
cos( 1t 1 ) 1 02 2
Частное решение неоднородного уравнения имеет общий
вид:
x2 B cos( t )
где
- частота вынуждающей силы, а B - амплитуда
и
- фаза задаются соответственно формулами:
53.
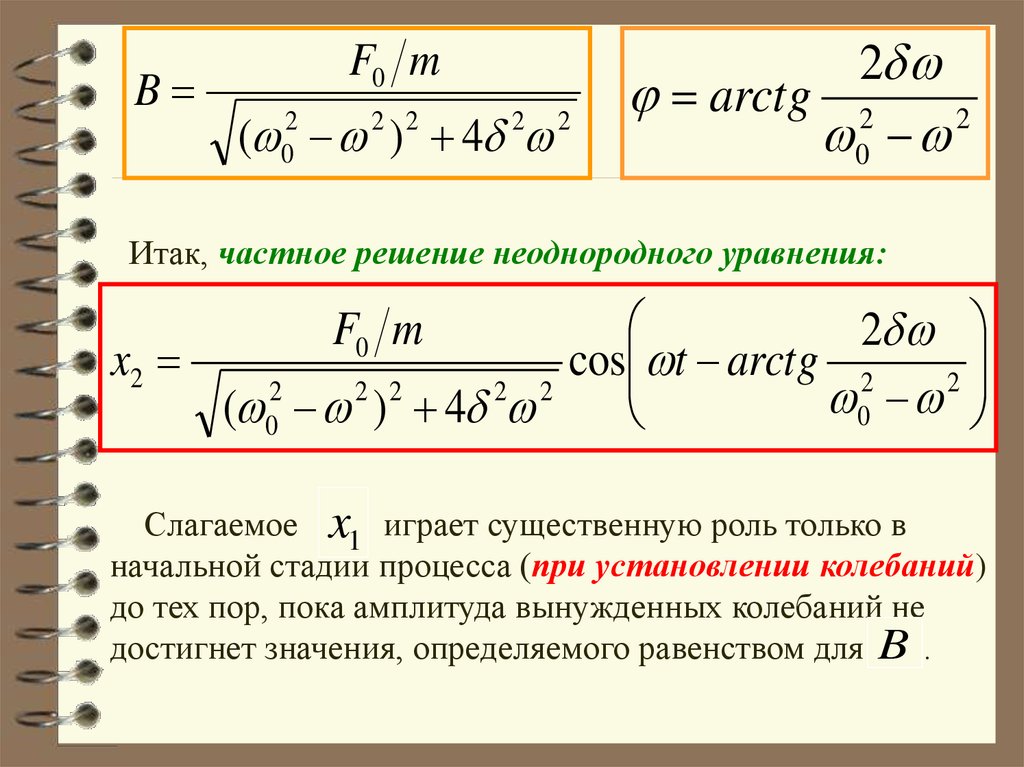
BF0 m
( 02 2 ) 2 4 2 2
2
arctg 2
2
0
Итак, частное решение неоднородного уравнения:
2
x2
cos t arctg 2
2
2
2 2
2 2
0
( 0 ) 4
F0 m
Слагаемое x1 играет существенную роль только в
начальной стадии процесса (при установлении колебаний)
до тех пор, пока амплитуда вынужденных колебаний не
достигнет значения, определяемого равенством для B .
54.
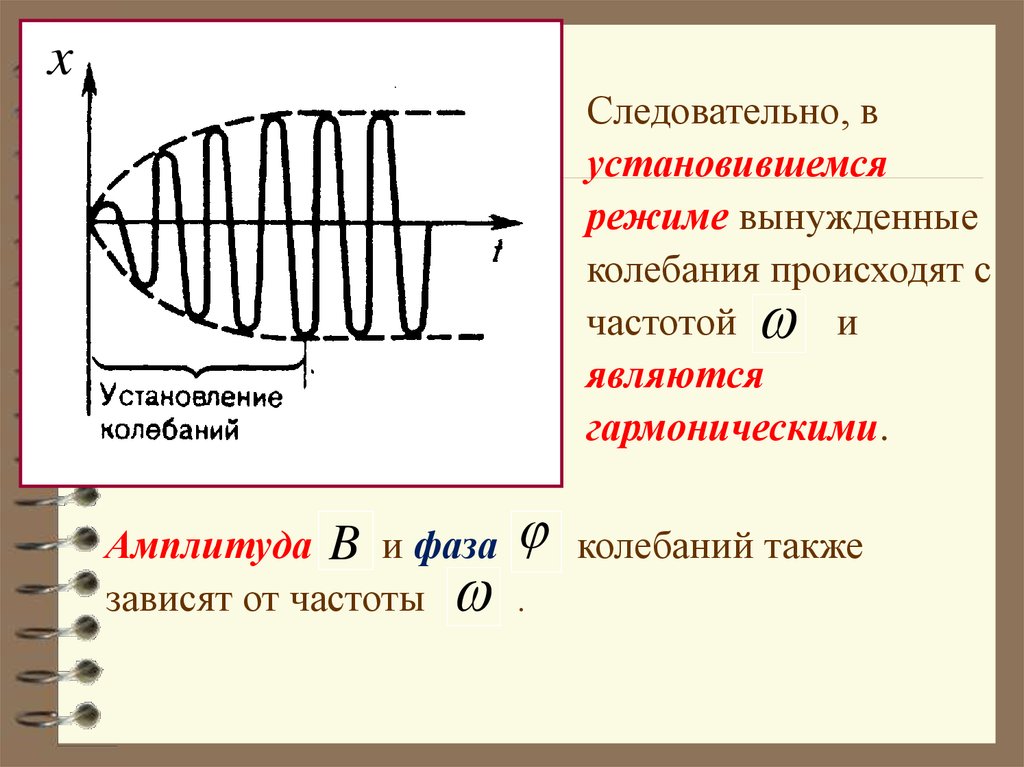
xСледовательно, в
установившемся
режиме вынужденные
колебания происходят с
частотой
и
являются
гармоническими.
Амплитуда B и фаза колебаний также
зависят от частоты
.
55.
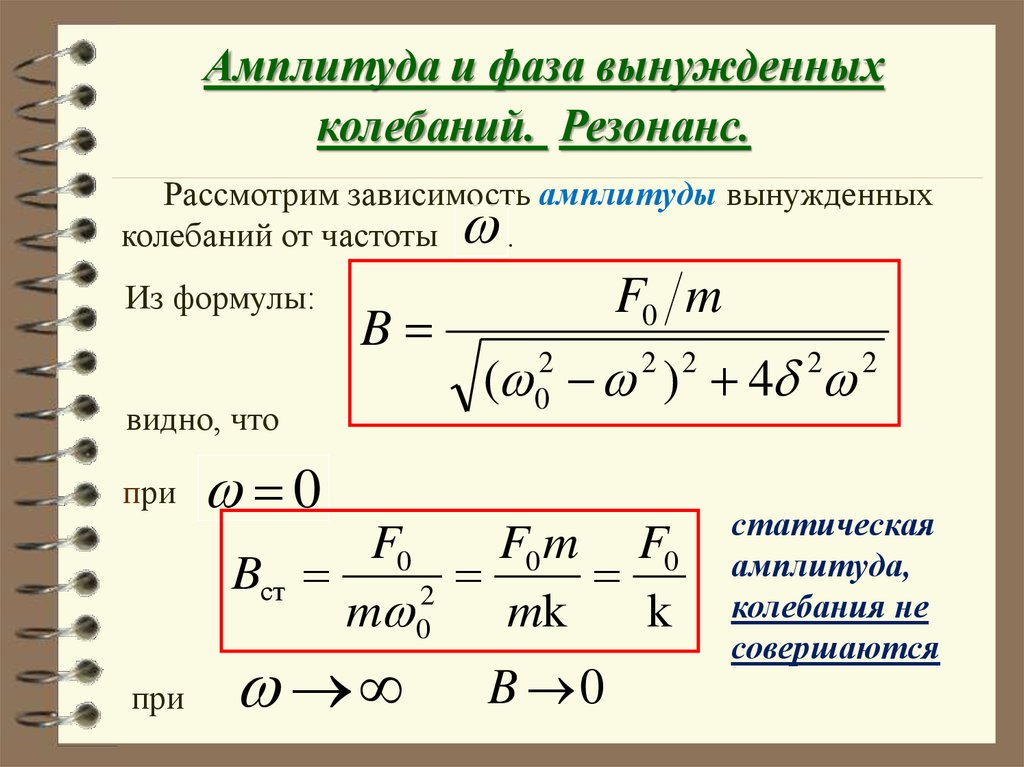
Амплитуда и фаза вынужденныхколебаний. Резонанс.
Рассмотрим зависимость амплитуды вынужденных
колебаний от частоты
.
Из формулы:
B
видно, что
при
F0 m
( ) 4
2
0
2 2
0
F0
F0 m F0
Bст
2
m 0
mk
k
при
B 0
2
2
статическая
амплитуда,
колебания не
совершаются
56.
BF0 m
( 02 2 ) 2 4 2 2
Видно, что амплитуда смещения имеет максимум при
некоторой частоте, которую называют резонансной рез
Чтобы определить резонансную частоту, нужно найти
максимум функции B ( ) , или, что то же самое,
минимум подкоренного выражения в знаменателе.
Продифференцировав подкоренное выражение по
и приравняв его нулю, получим условие,
определяющее
рез .
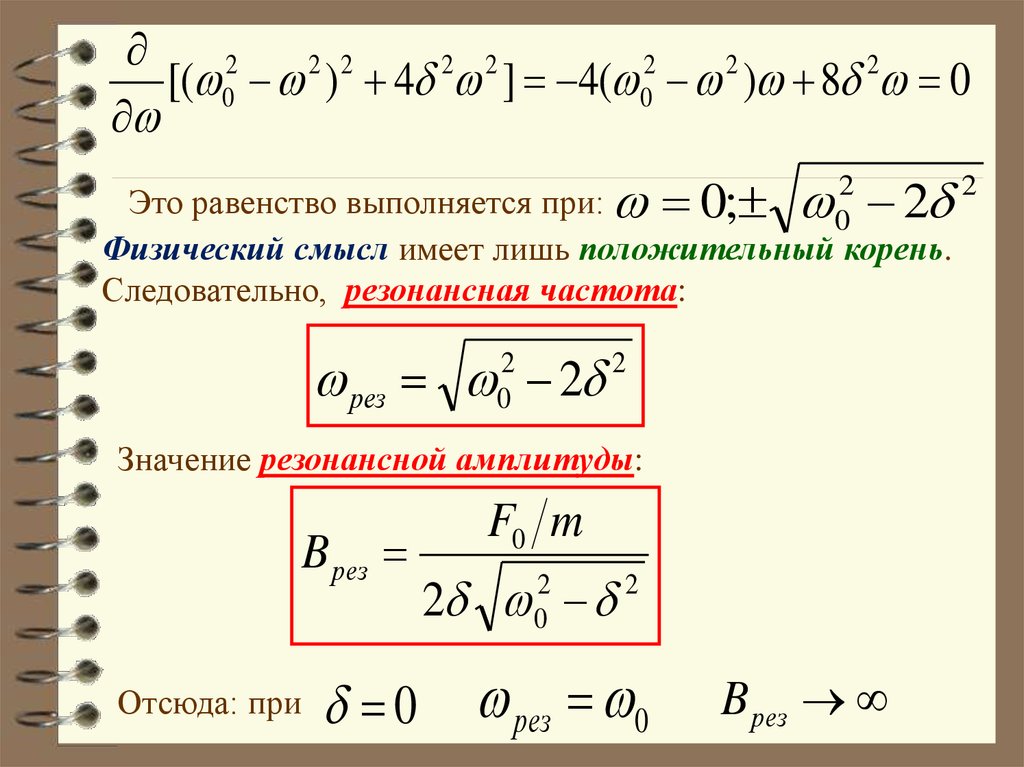
[( 02 2 ) 2 4 2 2 ] 4( 02 2 ) 8 2 0
57.
[( 02 2 ) 2 4 2 2 ] 4( 02 2 ) 8 2 0Это равенство выполняется при: 0; 0 2
Физический смысл имеет лишь положительный корень.
Следовательно, резонансная частота:
2
рез 2
2
0
2
Значение резонансной амплитуды:
B рез
Отсюда: при
0
F0 m
2
2
0
2
рез 0
B рез
2
58.
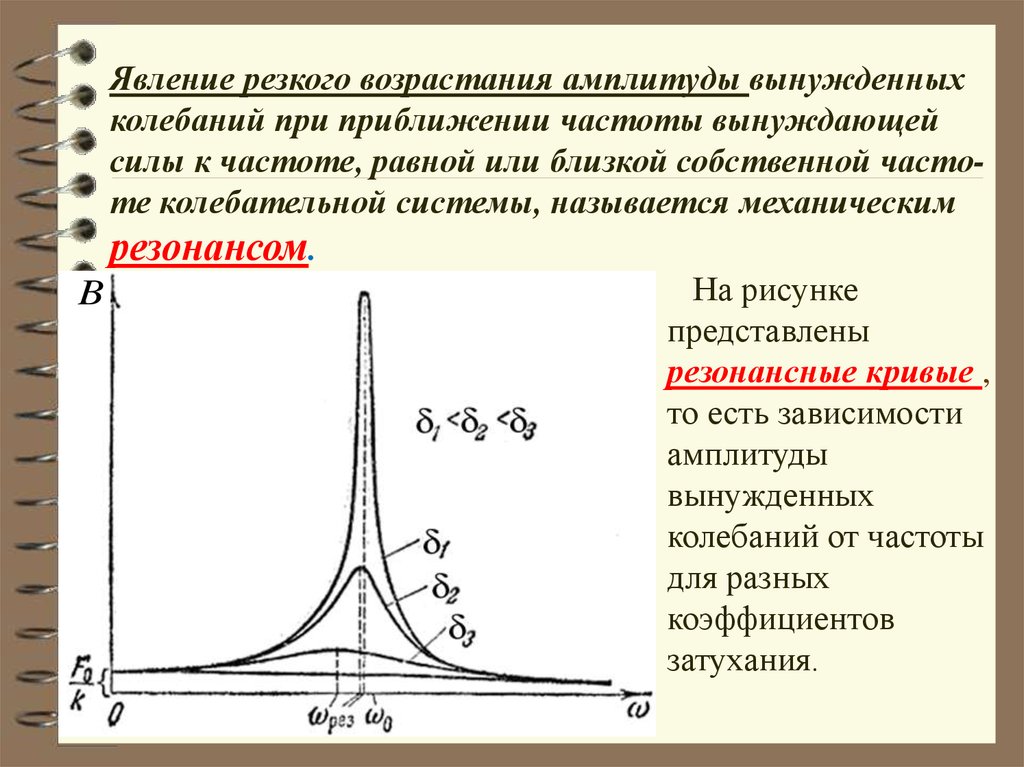
Явление резкого возрастания амплитуды вынужденныхколебаний при приближении частоты вынуждающей
силы к частоте, равной или близкой собственной частоте колебательной системы, называется механическим
резонансом.
На рисунке
B
представлены
резонансные кривые ,
то есть зависимости
амплитуды
вынужденных
колебаний от частоты
для разных
коэффициентов
затухания.
59.
При малом затухании:2
, Bрез
2
0
F0 m
2 0
Разделим полученную резонансную амплитуду на
статическое смещение системы из положения равновесия
под действием постоянной силы той же величины
Bст F0 m
2
0
F0 m 0 0T 2
Q
Bст m2 0 F0 2 2 T 2d d
Bрез
2
0
Добротность показывает, во сколько раз амплитуда в
момент резонанса превышает статическое смещение
системы при одинаковой силе.
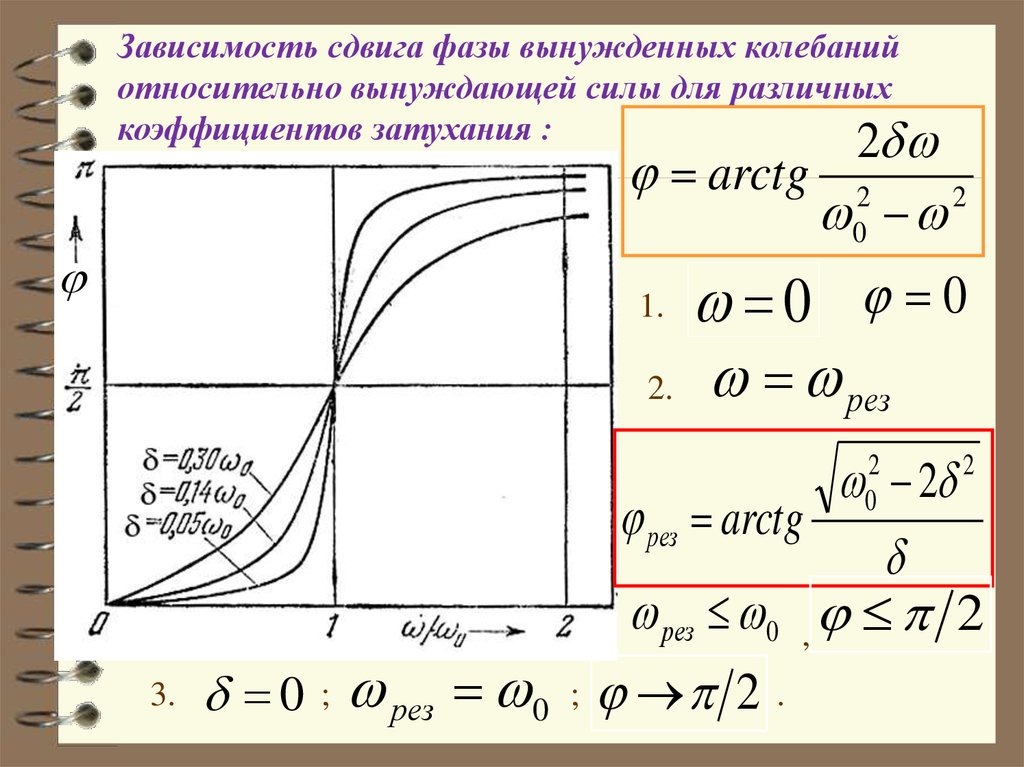
60.
Зависимость сдвига фазы вынужденных колебанийотносительно вынуждающей силы для различных
коэффициентов затухания :
2
arctg 2
2
0
0 0
2. рез
1.
2
рез arctg
рез 0 , 2
2
0
3.
0 ; рез 0 ; 2
.
2