










 Физика
Физика Механика
МеханикаПохожие презентации:

")



")


")

Равновесие пространственной системы сил. (Лекция 3)
1.
РавновесиеРавновесие пространственной
пространственной системы
системы сил
сил
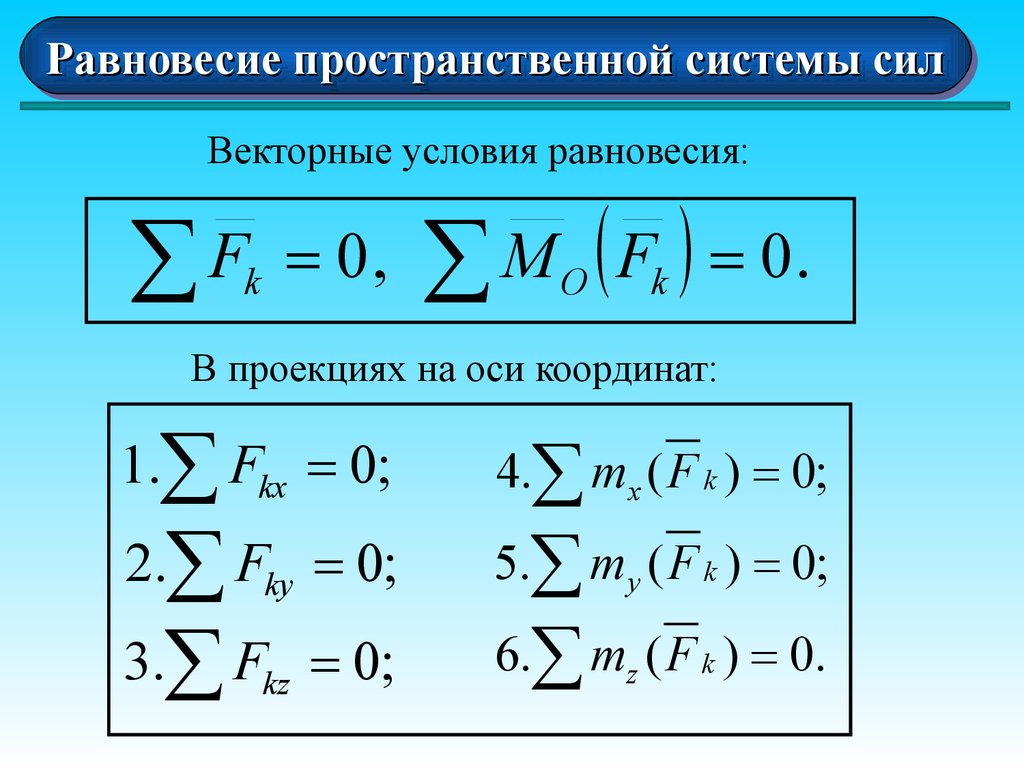
Векторные условия равновесия:
F
k
0,
M F 0.
O
k
В проекциях на оси координат:
1. Fkx 0;
2. Fky 0;
3. Fkz 0;
4. mx ( F k ) 0;
5. my ( F k ) 0;
6. mz ( F k ) 0.
2.
РавновесиеРавновесие пространственной
пространственной системы
системы сил
сил
Для
равновесия
пространственной
системы сил необходимо и достаточно, чтобы
были равны нулю алгебраические суммы
проекций всех сил на координатные оси и
алгебраические суммы моментов всех сил
относительно координатных осей.
3.
МОМЕНТМОМЕНТ СИЛЫ
СИЛЫ ОТНОСИТЕЛЬНО
ОТНОСИТЕЛЬНО ОСИ
ОСИ
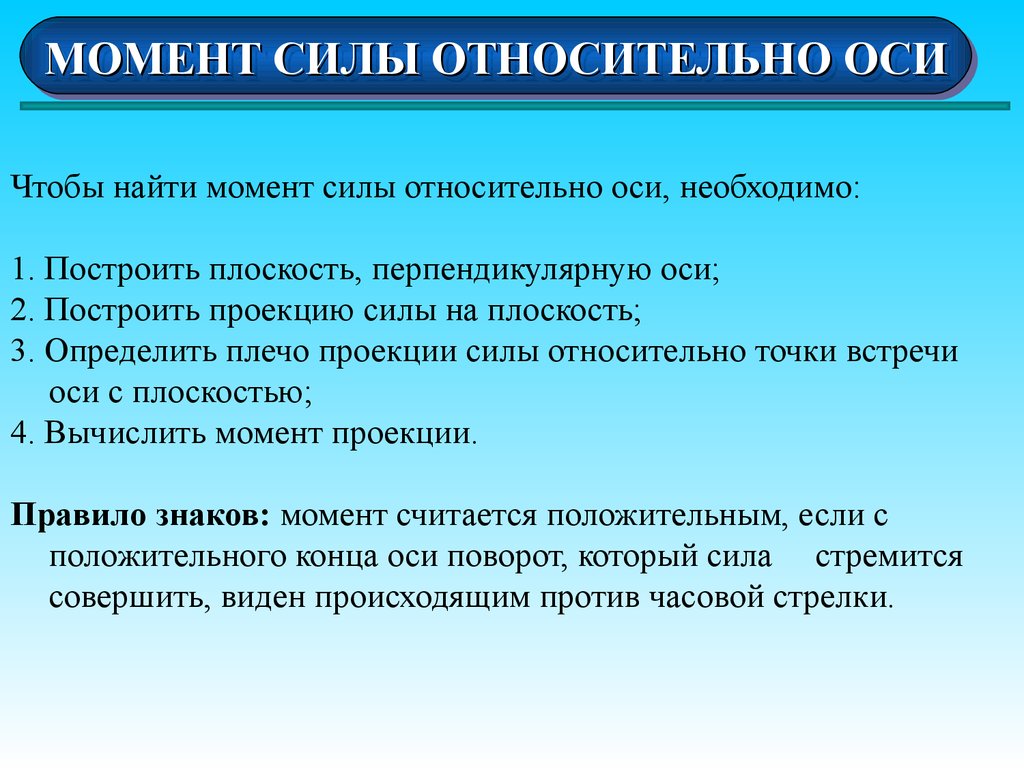
Чтобы найти момент силы относительно оси, необходимо:
1. Построить плоскость, перпендикулярную оси;
2. Построить проекцию силы на плоскость;
3. Определить плечо проекции силы относительно точки встречи
оси с плоскостью;
4. Вычислить момент проекции.
Правило знаков: момент считается положительным, если с
положительного конца оси поворот, который сила стремится
совершить, виден происходящим против часовой стрелки.
4.
МОМЕНТМОМЕНТ СИЛЫ
СИЛЫ ОТНОСИТЕЛЬНО
ОТНОСИТЕЛЬНО ОСИ
ОСИ
Z
F
h
F'
'
M z (F ) = ±F • h
5.
МОМЕНТМОМЕНТ СИЛЫ
СИЛЫ ОТНОСИТЕЛЬНО
ОТНОСИТЕЛЬНО ОСИ
ОСИ
Момент силы относительно оси равен нулю,
если:
• сила параллельна оси;
• линия действия силы пересекает ось.
6. Пример: Определить реакции заделки
РавновесиеРавновесие пространственной
пространственной системы
системы сил
сил
Пример:
Определить реакции заделки
z
q
B
A
D
O
x
F
y
7.
РавновесиеРавновесие пространственной
пространственной системы
системы сил
сил
z
1. FX X O 0;
Q=q*lAB
A
Zo M D
z
Yo
Mx O
My
Xo
x
B
F
2. Fy YO - F 0;
3. FZ Z O - Q 0;
4. M X ( FK ) M X +
l AB
+ F × lOA - Q ×
0;
2
y
5. M Y ( FK ) M Y 0;
6. M Z ( FK ) M Z -
- F × lBD 0;
8.
РавновесиеРавновесие тел
тел при
при наличии
наличии трения
трения
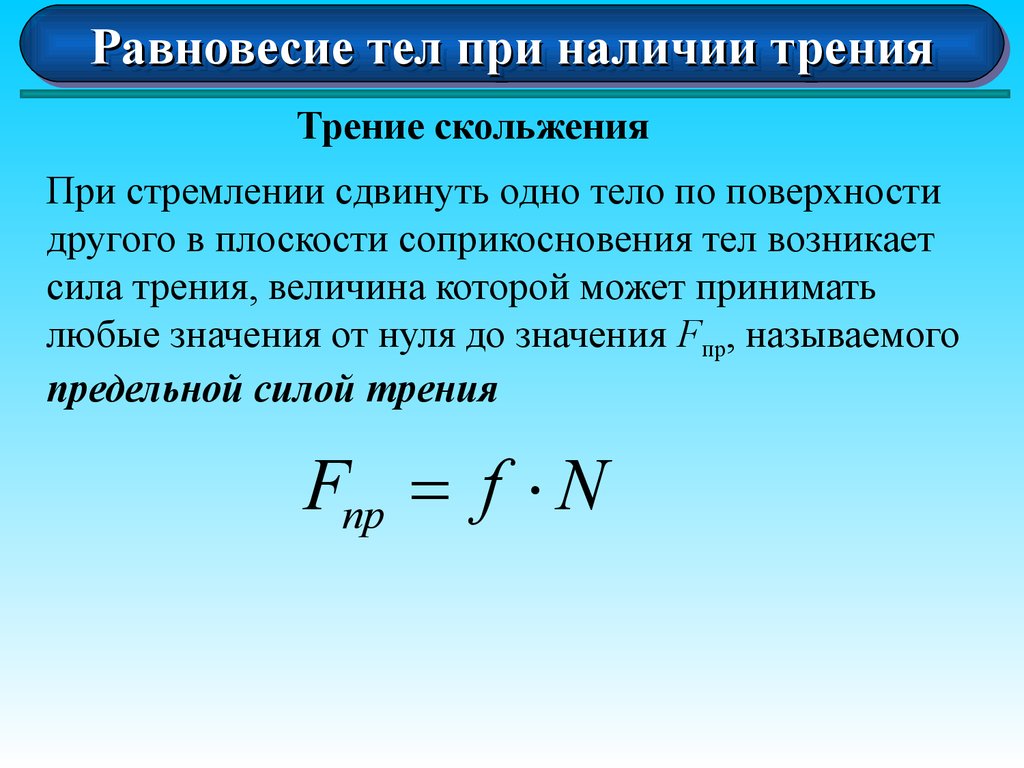
Трение скольжения
При стремлении сдвинуть одно тело по поверхности
другого в плоскости соприкосновения тел возникает
сила трения, величина которой может принимать
любые значения от нуля до значения Fпр, называемого
предельной силой трения
Fпр f × N
9.
РавновесиеРавновесие тел
тел при
при наличии
наличии трения
трения
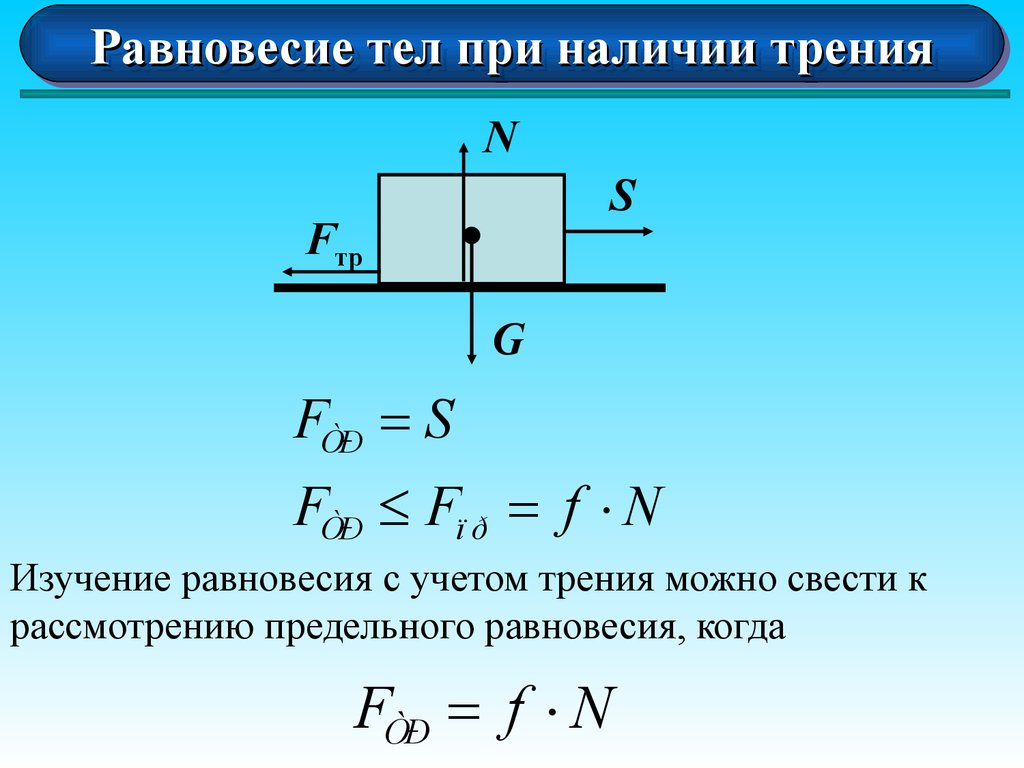
N
S
Fтр
G
FÒÐ S
FÒÐ £ Fï ð f × N
Изучение равновесия с учетом трения можно свести к
рассмотрению предельного равновесия, когда
FÒÐ f × N
10.
РавновесиеРавновесие тел
тел при
при наличии
наличии трения
трения
Законы трения:
1. Сила
трения
направлена
в
сторону,
противоположную той, куда действующие силы
стремятся сдвинуть тело.
2. Сила
трения
не
зависит
от
размеров
соприкасающихся при трении поверхностей.
3. Коэффициент трения скольжения f зависит от
физич. свойств трущихся поверхностей.
Значение f для некоторых тел:
дерево по дереву…0,4..0,7
металл по металлу…0,15..0,25
сталь по льду…0,023
11.
РавновесиеРавновесие тел
тел при
при наличии
наличии трения
трения
Реакции шероховатых связей. Угол трения
N
R
φ
FT max
FT max
tg f
N
Q
tg f f
12.
РавновесиеРавновесие тел
тел при
при наличии
наличии трения
трения
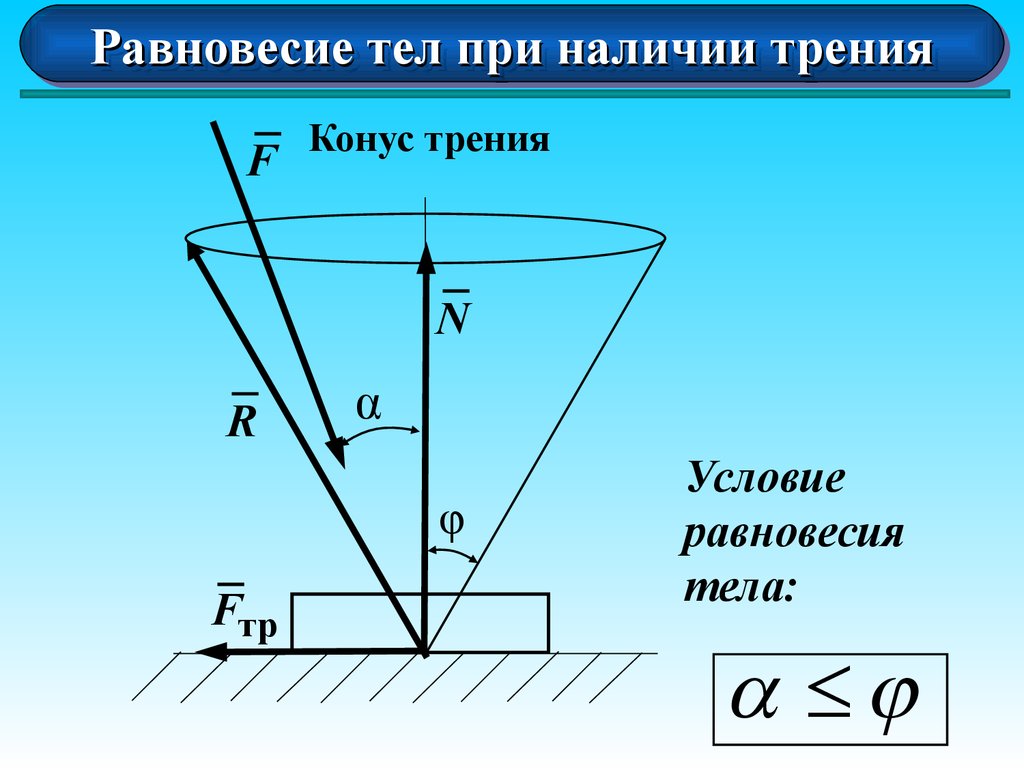
F
Конус трения
N
R
α
φ
Fтр
Условие
равновесия
тела:
£
13. Пример Дано: АВ=2а; G; стенка гладкая, пол шероховатый.
РавновесиеРавновесие тел
тел при
при наличии
наличии трения
трения
Пример
y
Дано:
АВ=2а;
G;
стенка гладкая, пол
шероховатый.
А
G
x
B
45
0
Определить коэфф.трения
при равновесии.
14.
РавновесиеРавновесие тел
тел при
при наличии
наличии трения
трения
A
RA
y
F
F
RA - FÒ 0
>
FÒ RA ;
ky
NB - G 0
>
N B G;
NB
G
x
kx
FT
B
M F G × cos 45 × a - R
B
G
RA
2
k
>
G
FT
2
A
× cos 45 × 2 × a 0
>
FT 0,5 × G
f ³
0,5;
NB
G
15. Трение качения
РавновесиеРавновесие тел
тел при
при наличии
наличии трения
трения
Трение качения
Трением качения называется сопротивление,
возникающее при качении одного тела по
поверхности другого.
16.
РавновесиеРавновесие тел
тел при
при наличии
наличии трения
трения
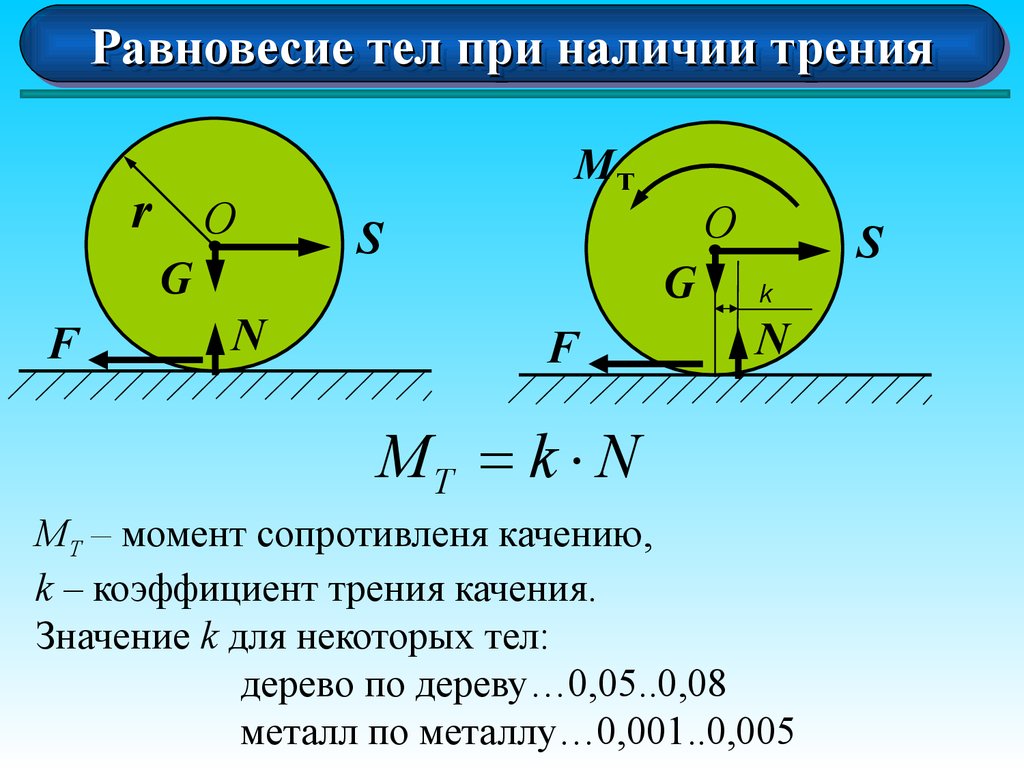
r
O
G
F
N
Mт
S
O
G
F
S
k
N
MT k × N
MT – момент сопротивленя качению,
k – коэффициент трения качения.
Значение k для некоторых тел:
дерево по дереву…0,05..0,08
металл по металлу…0,001..0,005
17. Пример
Дано: G1 , , R , .Найти min G2 при равновесии
системы.
1
R
MT
2
G1
G2
S
N
G1 O
FT
M T × N × G1 × cos
S=G2
18.
РавновесиеРавновесие тел
тел при
при наличии
наличии трения
трения
M F 0:
O
k
G2
× G1 × cos
G1 × R × sin - S × R - M T 0
min G2 G1 sin - cos .
R