








 Математика
МатематикаПохожие презентации:







")


Линейная алгебра и аналитическая геометрия
1.
МАТЕМАТИКА2.
Список литературы1. Кремер Н.Ш. Высшая математика для экономистов:
Учебник
2. Кремер Н.Ш. Высшая математика для экономистов.
Практикум: Учебное пособие.
3. Данко П.Е., Попов А.Г., Кожевникова Т.Я. Высшая
математика в упражнениях и задачах.
4. Гусак А.А., Гусак Г.М., Бричикова Е.А Справочник по
высшей математике.
5. Шипачёв В.С. Высшая математика. Учебник и
практикум.
3.
Содержание дисциплиныЛинейная алгебра и аналитическая
геометрия:
1. Матрицы
2. Определители
3. Системы линейных уравнений
4. Аналитическая геометрия
Математический анализ:
1. Предел функции
2. Дифференциальное исчисление
3. Неопределенный интеграл
4. Определенный интеграл
5. Дифференциальные уравнения
6. Ряды
4.
Линейная алгебра5.
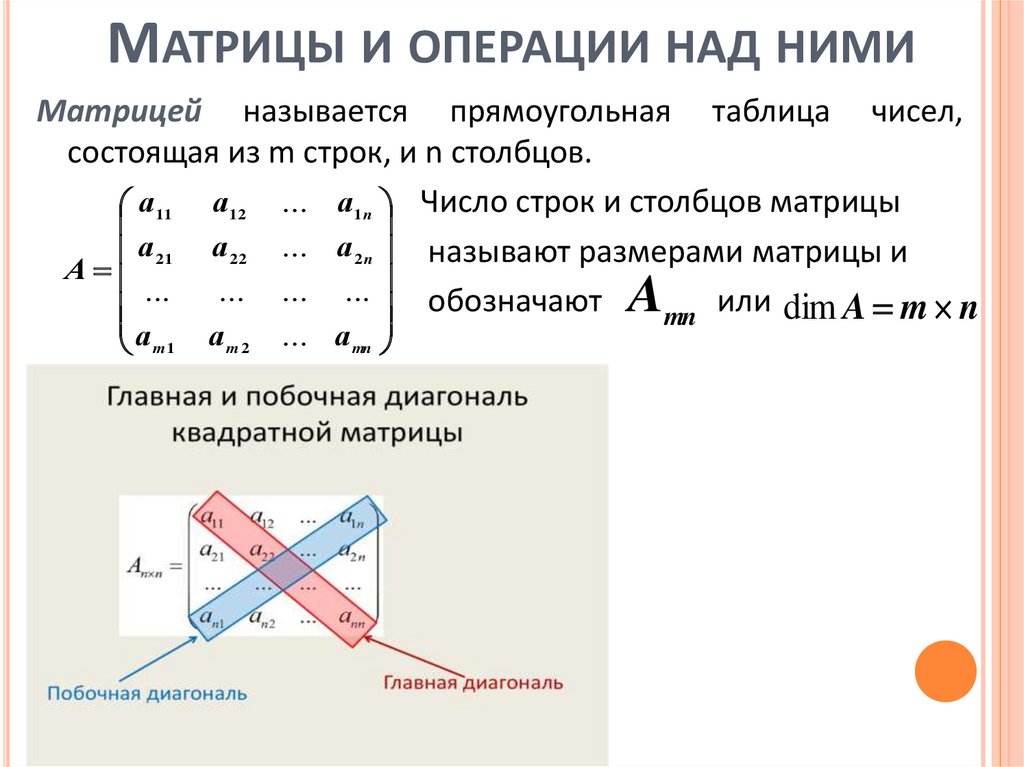
МАТРИЦЫ И ОПЕРАЦИИ НАД НИМИМатрицей называется прямоугольная таблица чисел,
состоящая из m строк, и n столбцов.
а11 а12 ... а1 n Число строк и столбцов матрицы
а 21 а 22 ... а 2 n называют размерами матрицы и
А
...
... ... ... обозначают A
или dim A m n
mn
а
m1
аm 2
... а mn
6.
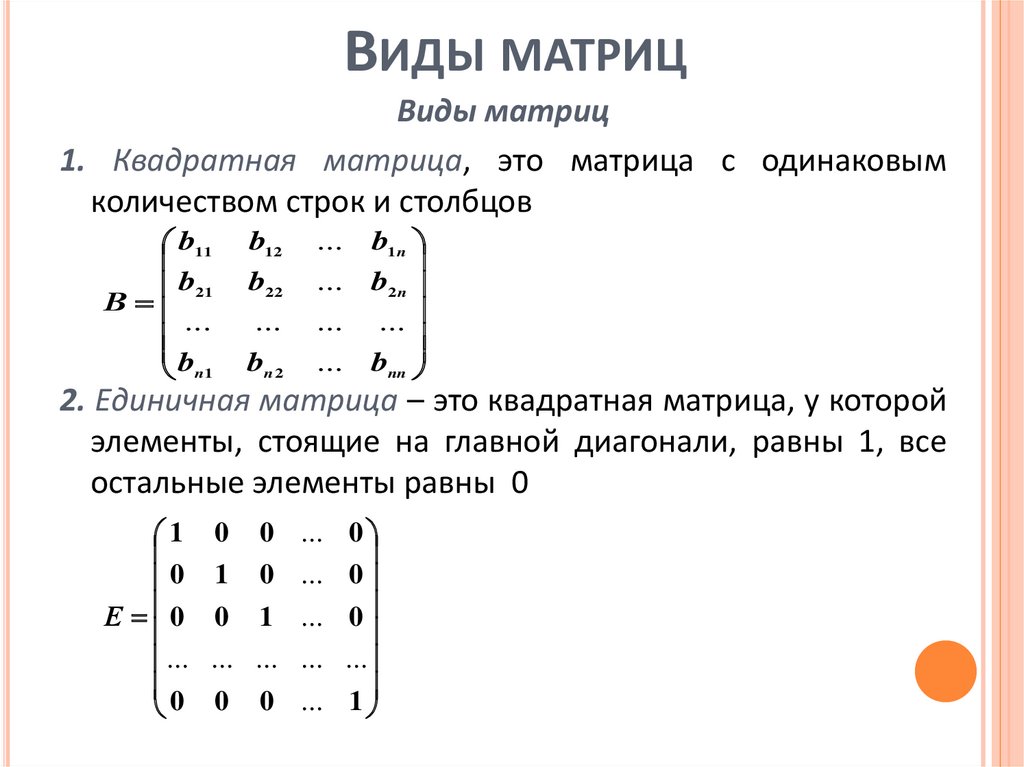
ВИДЫ МАТРИЦВиды матриц
1. Квадратная матрица, это матрица с одинаковым
количеством строк и столбцов
b11
b21
В
...
bn1
b12
...
b22
...
...
...
bn 2
...
b1 n
b2 n
...
bnn
2. Единичная матрица – это квадратная матрица, у которой
элементы, стоящие на главной диагонали, равны 1, все
остальные элементы равны 0
1
0
Е 0
...
0
0
1
0
...
0
0 ... 0
0 ... 0
1 ... 0
... ... ...
0 ... 1
7.
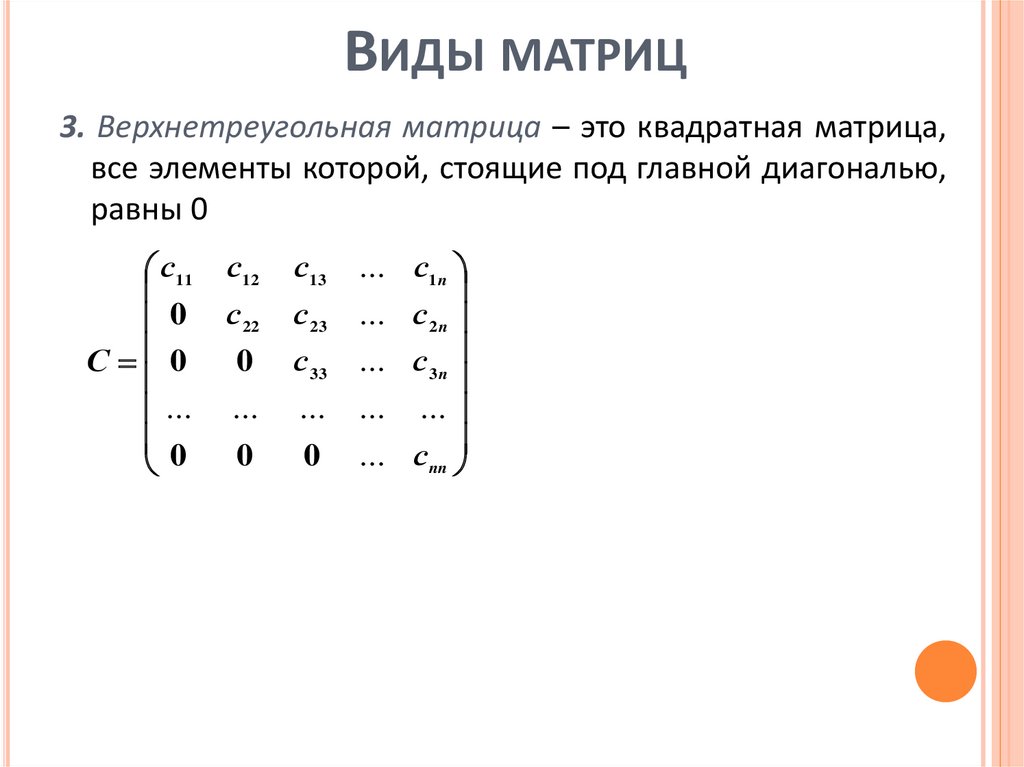
ВИДЫ МАТРИЦ3. Верхнетреугольная матрица – это квадратная матрица,
все элементы которой, стоящие под главной диагональю,
равны 0
с11
0
С 0
...
0
с12
с13
с 22
с 23
0
с 33
...
...
0
0
... с1 n
... с 2 n
... с 3 n
... ...
... с nn
8.
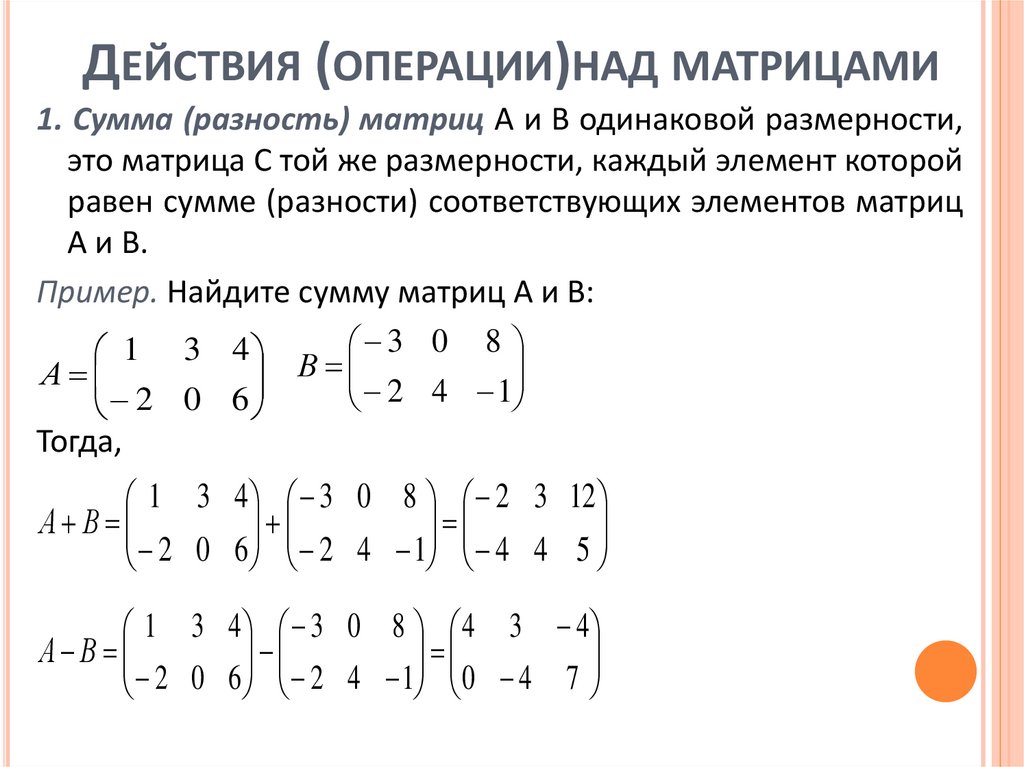
ДЕЙСТВИЯ (ОПЕРАЦИИ)НАД МАТРИЦАМИ1. Сумма (разность) матриц А и В одинаковой размерности,
это матрица С той же размерности, каждый элемент которой
равен сумме (разности) соответствующих элементов матриц
А и В.
Пример. Найдите сумму матриц А и В:
1 3 4 В 3 0 8
А
2 4 1
2 0 6
Тогда,
1 3 4 3 0 8 2 3 12
А В
2 0 6 2 4 1 4 4 5
1 3 4 3 0 8 4 3 4
А В
2 0 6 2 4 1 0 4 7
9.
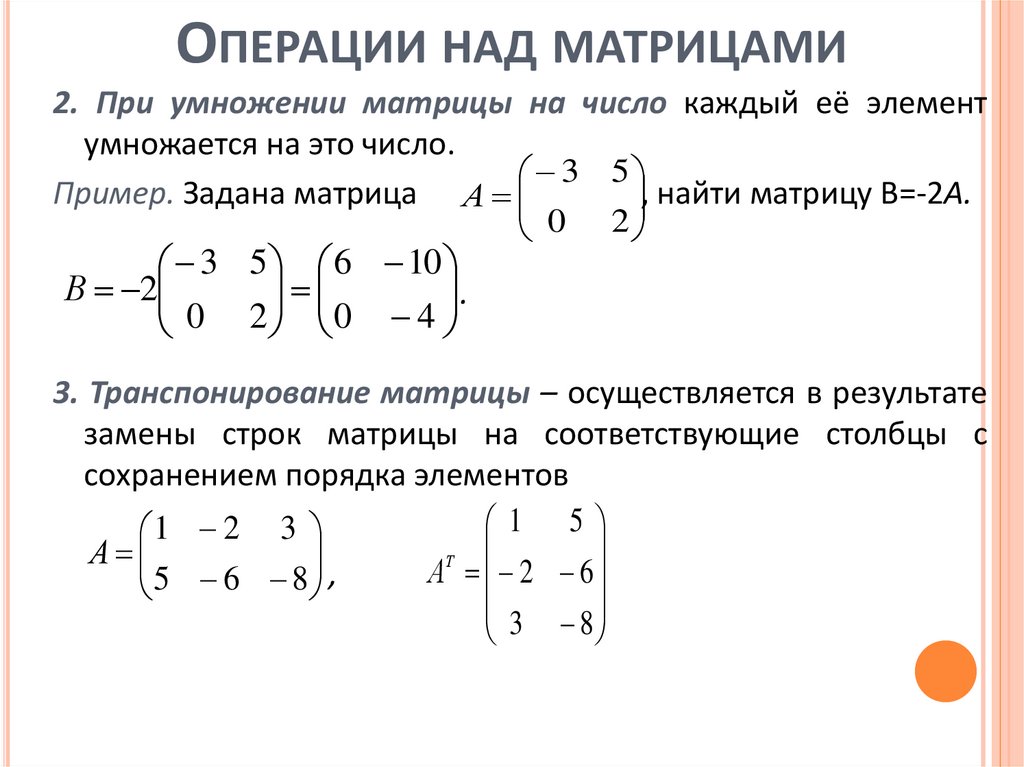
ОПЕРАЦИИ НАД МАТРИЦАМИ2. При умножении матрицы на число каждый её элемент
умножается на это число.
3 5
Пример. Задана матрица А
, найти матрицу В=-2А.
0 2
3 5 6 10
.
В 2
0 2 0 4
3. Транспонирование матрицы – осуществляется в результате
замены строк матрицы на соответствующие столбцы с
сохранением порядка элементов
1 5
1 2 3
А
Т
А 2 6
5 6 8 ,
3 8
10.
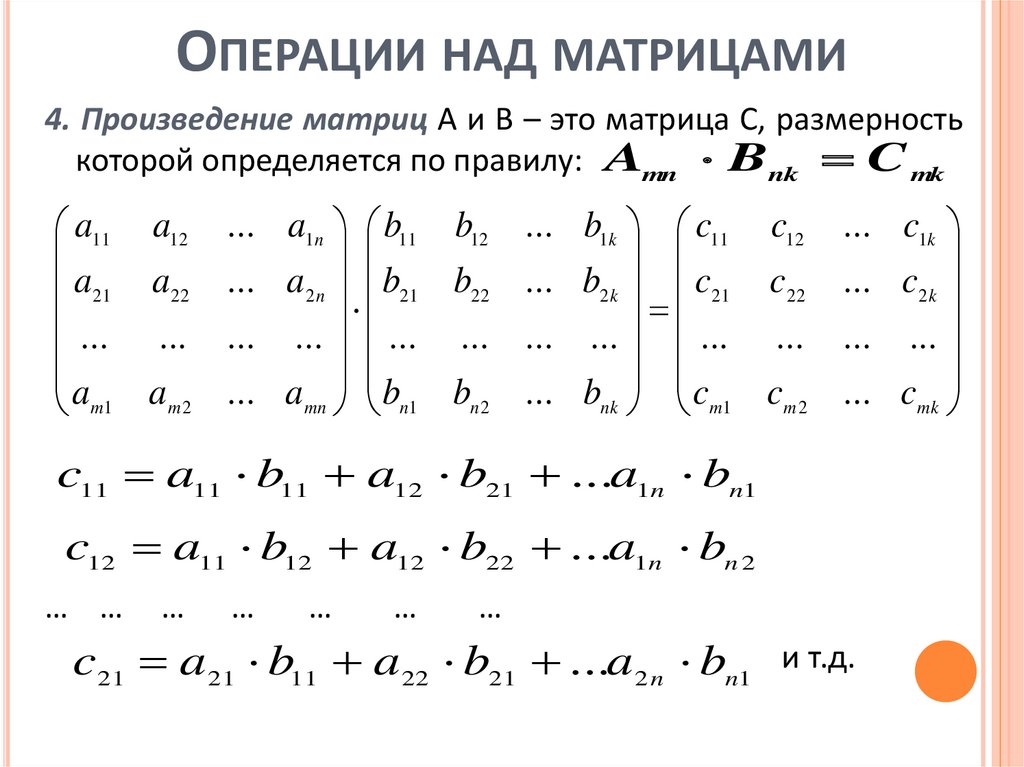
ОПЕРАЦИИ НАД МАТРИЦАМИ4. Произведение матриц А и В – это матрица С, размерность
которой определяется по правилу: Amn Bnk C mk
a11 a12
a21 a22
... ...
am1 am 2
... a1n b11 b12
... a2 n b21 b22
... ...
... ...
... amn bn1 bn 2
... b1k c11 c12
... b2 k c21 c22
... ...
... ...
... bnk cm1 cm 2
... c1k
... c2 k
... ...
... cmk
c11 a11 b11 a12 b21 ...a1n bn1
c12 a11 b12 a12 b22 ...a1n bn 2
… …
…
…
…
…
…
c21 a21 b11 a22 b21 ...a2 n bn1
и т.д.
11.
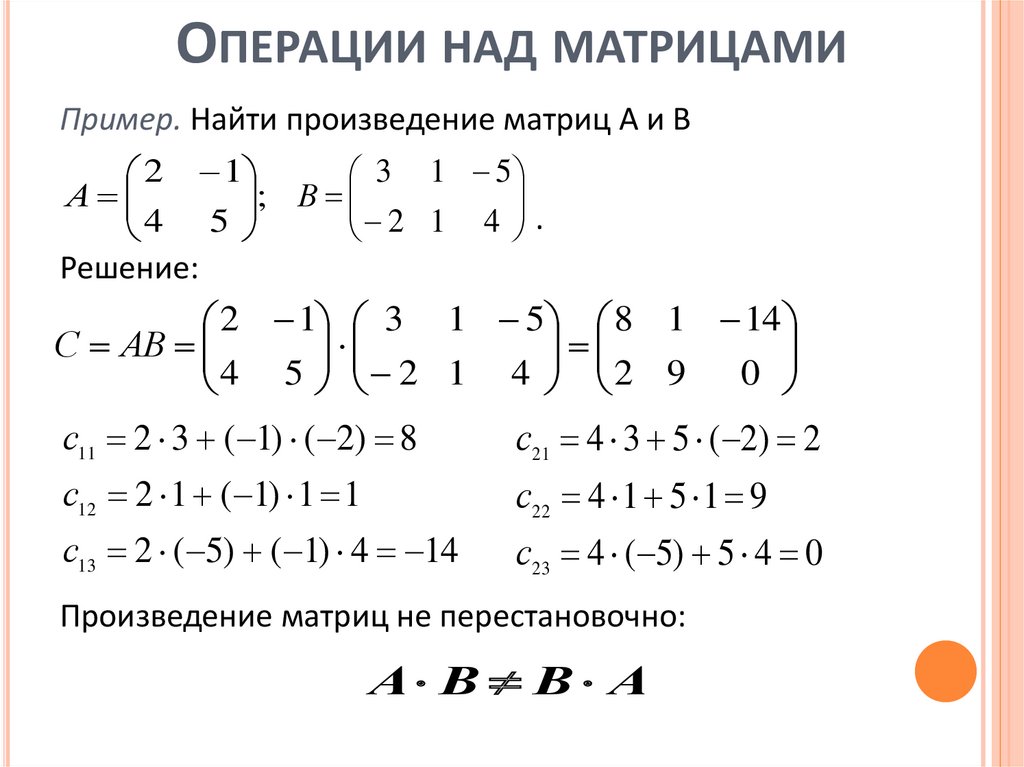
ОПЕРАЦИИ НАД МАТРИЦАМИПример. Найти произведение матриц А и В
3 1 5
2 1
; В
А
2 1 4 .
4 5
Решение:
2 1 3 1 5 8 1 14
С АВ
0
4 5 2 1 4 2 9
с11 2 3 ( 1) ( 2) 8
с21 4 3 5 ( 2) 2
с12 2 1 ( 1) 1 1
с22 4 1 5 1 9
с13 2 ( 5) ( 1) 4 14
с23 4 ( 5) 5 4 0
Произведение матриц не перестановочно:
А В В А
12.
ПРЕОБРАЗОВАНИЯ НАД СТРОКАМИ (СТОЛБЦАМИ) МАТРИЦЫ1) можно менять строки (столбцы) местами;
2) можно умножать элементы строки на одно и то же число,
отличное от нуля;
3) можно складывать (вычитать) строки друг с другом.
Верхнетреугольная матрица, у которой под главной
диагональю все элементы равны нулю, называется
приведенной к ступенчатому виду. При этом элементы,
стоящие на главной диагонали называются угловыми
элементами.
Ранг матрицы А – это максимальное число линейно
независимых строк этой матрицы.
13.
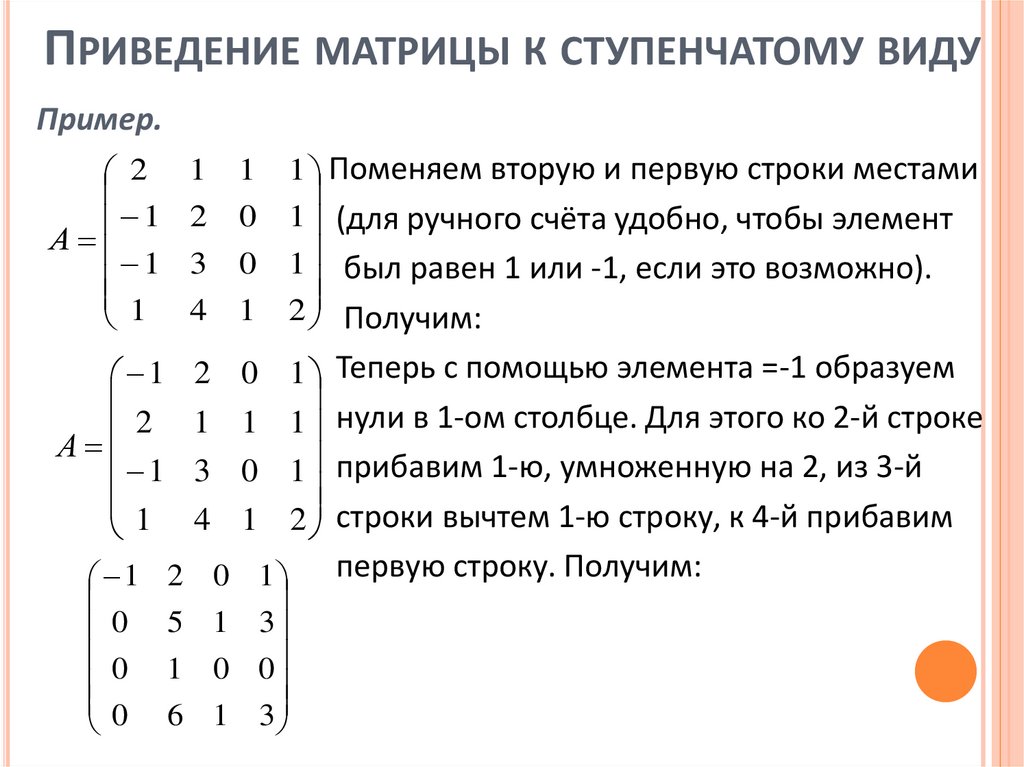
ПРИВЕДЕНИЕ МАТРИЦЫ К СТУПЕНЧАТОМУ ВИДУПример.
2
1
А
1
1
1
1
2
0
3
0
4
1
1 2
2 1
А
1 3
1 4
1 2 0
0 5 1
0 1 0
0 6 1
1 Поменяем вторую и первую строки местами
1 (для ручного счёта удобно, чтобы элемент
1 был равен 1 или -1, если это возможно).
2 Получим:
0 1
1 1
0 1
1 2
1
3
0
3
Теперь с помощью элемента =-1 образуем
нули в 1-ом столбце. Для этого ко 2-й строке
прибавим 1-ю, умноженную на 2, из 3-й
строки вычтем 1-ю строку, к 4-й прибавим
первую строку. Получим:
14.
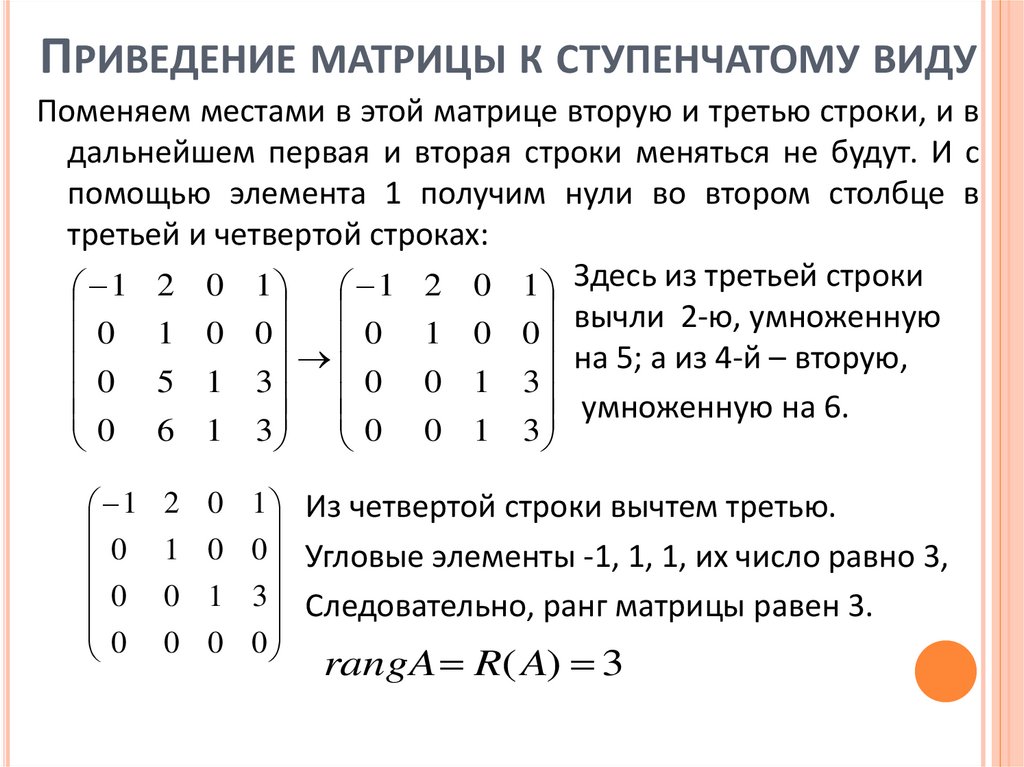
ПРИВЕДЕНИЕ МАТРИЦЫ К СТУПЕНЧАТОМУ ВИДУПоменяем местами в этой матрице вторую и третью строки, и в
дальнейшем первая и вторая строки меняться не будут. И с
помощью элемента 1 получим нули во втором столбце в
третьей и четвертой строках:
1 2 0 1
1 2 0 1 Здесь из третьей строки
вычли 2-ю, умноженную
0 1 0 0
0 1 0 0
0 5 1 3 0 0 1 3 на 5; а из 4-й – вторую,
умноженную на 6.
0
1
0
0
0
6 1 3
0
0 1 3
2 0 1 Из четвертой строки вычтем третью.
1 0 0 Угловые элементы -1, 1, 1, их число равно 3,
0 1 3 Следовательно, ранг матрицы равен 3.
0 0 0
rangA R( A) 3
15.
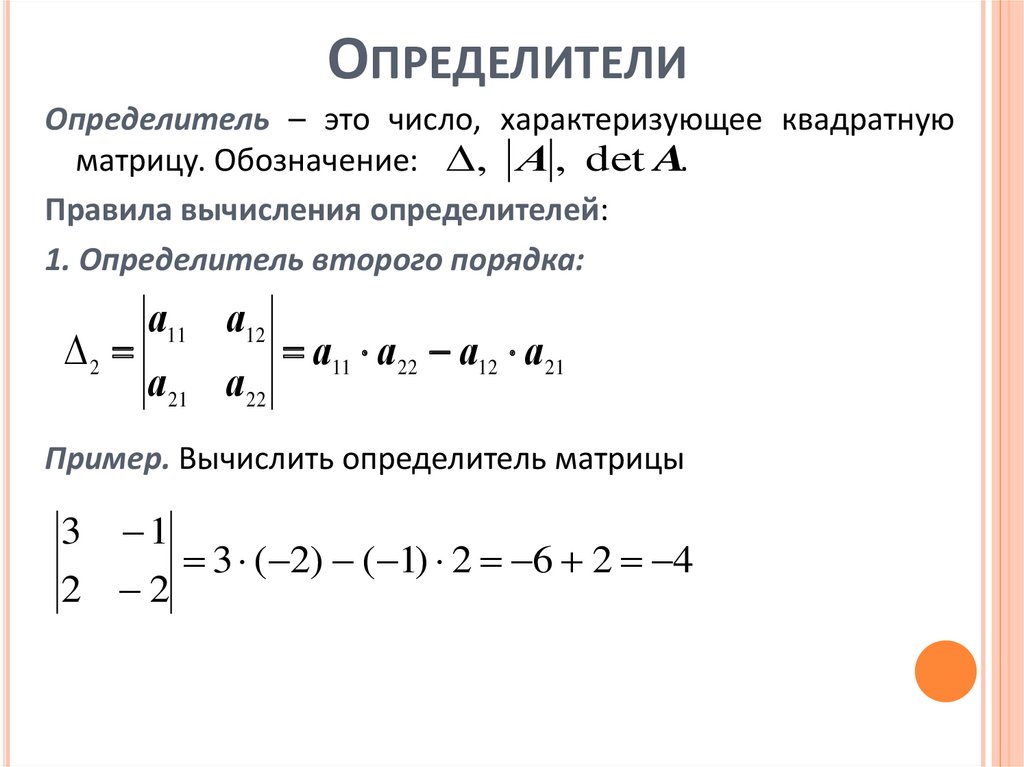
ОПРЕДЕЛИТЕЛИОпределитель – это число, характеризующее квадратную
матрицу. Обозначение: , А , det A.
Правила вычисления определителей:
1. Определитель второго порядка:
2
а11 а12
а 21 а 22
а11 а 22 а12 а 21
Пример. Вычислить определитель матрицы
3
1
2 2
3 ( 2) ( 1) 2 6 2 4
16.
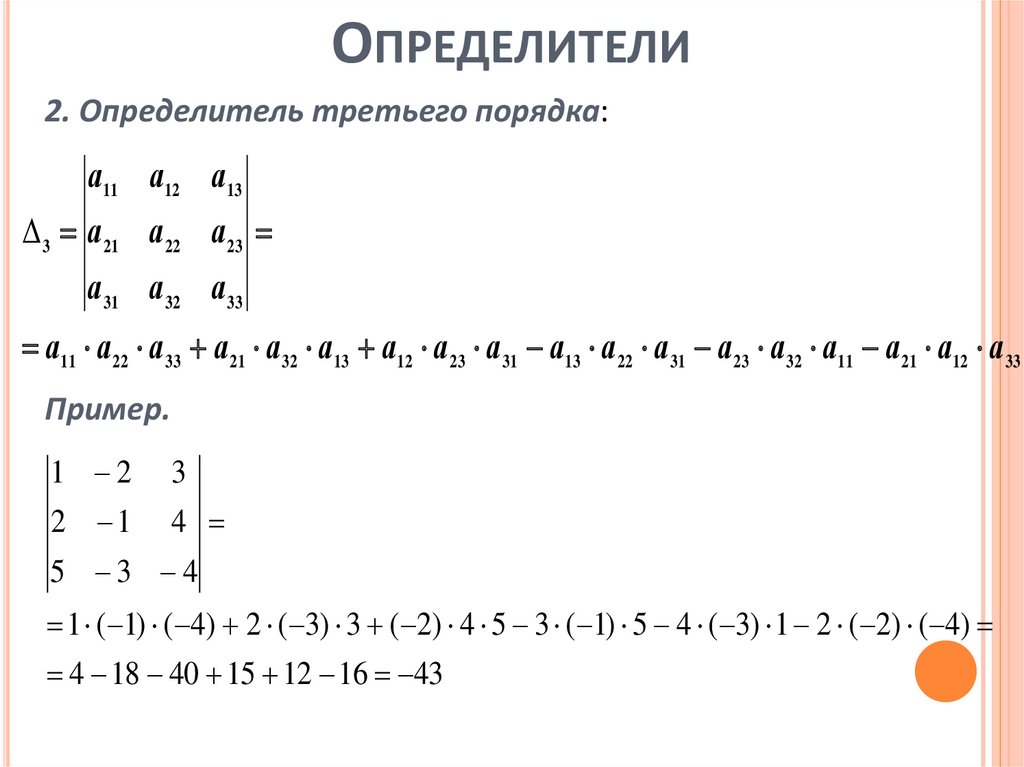
ОПРЕДЕЛИТЕЛИ2. Определитель третьего порядка:
а11 а12 а13
3 а 21 а 22 а 23
а 31 а 32 а 33
а11 а 22 а 33 а 21 а 32 а13 а12 а 23 а 31 а13 а 22 а 31 а 23 а 32 а11 а 21 а12 а 33
Пример.
1 2
3
2 1
4
5 3 4
1 ( 1) ( 4) 2 ( 3) 3 ( 2) 4 5 3 ( 1) 5 4 ( 3) 1 2 ( 2) ( 4)
4 18 40 15 12 16 43
17.
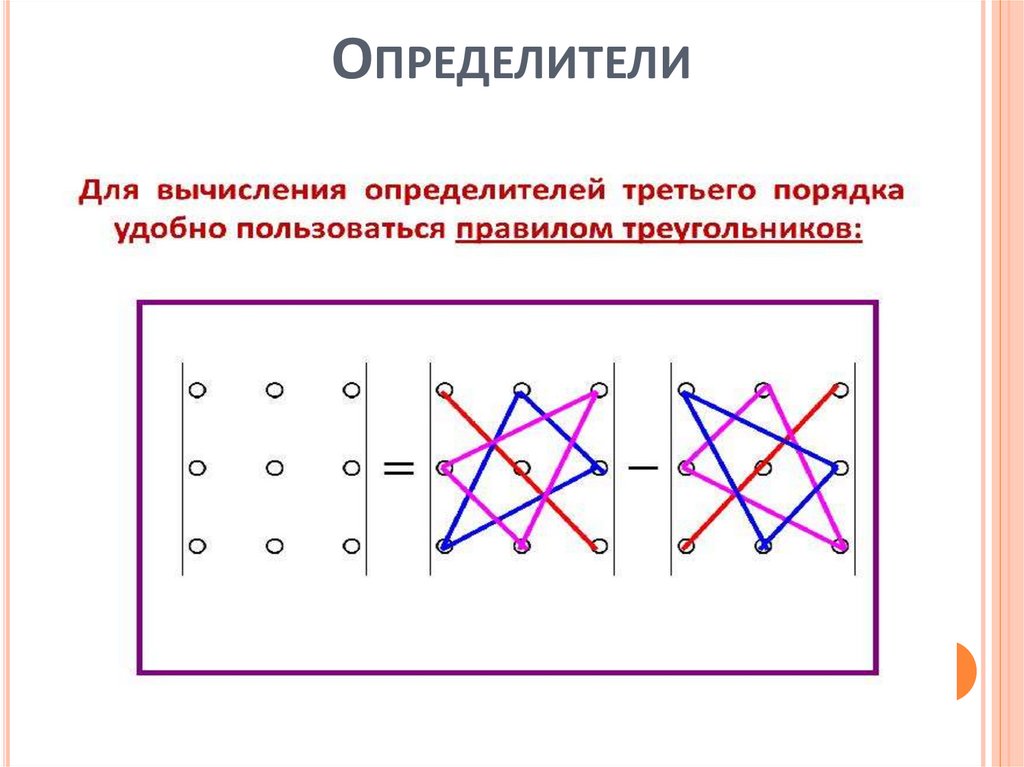
ОПРЕДЕЛИТЕЛИ18.
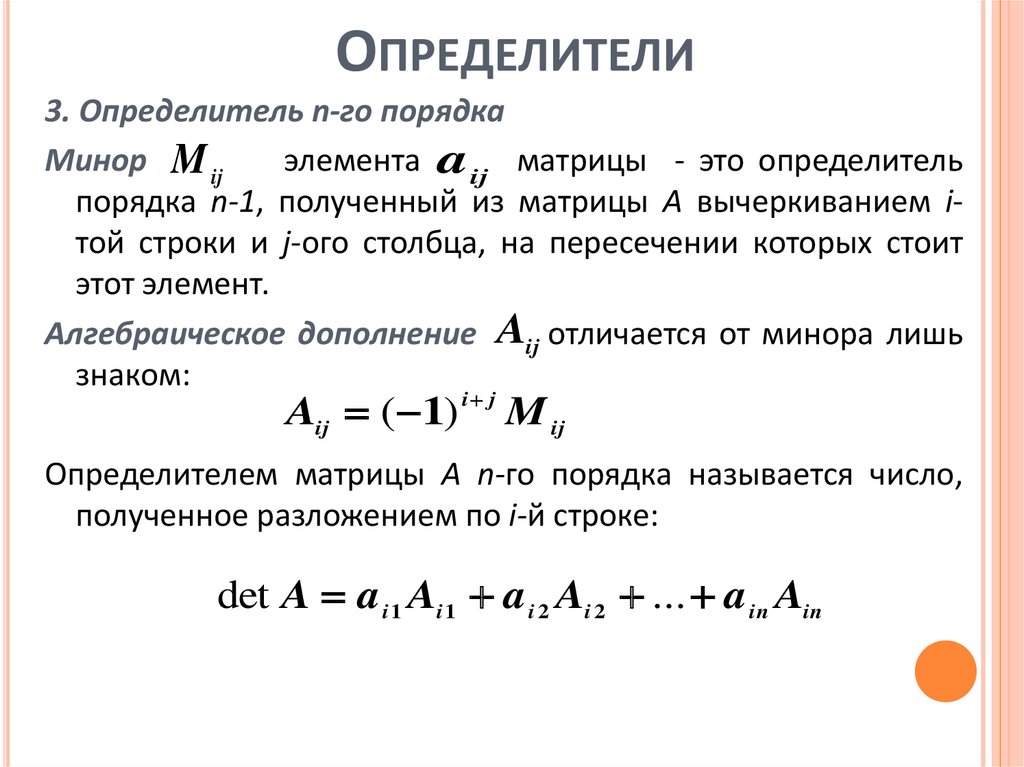
ОПРЕДЕЛИТЕЛИ3. Определитель n-го порядка
Минор M ij
элемента a ij матрицы - это определитель
порядка n-1, полученный из матрицы А вычеркиванием iтой строки и j-ого столбца, на пересечении которых стоит
этот элемент.
Алгебраическое дополнение Aij отличается от минора лишь
знаком:
Aij ( 1) i j M ij
Определителем матрицы А n-го порядка называется число,
полученное разложением по i-й строке:
det A a i 1 Ai 1 a i 2 Ai 2 ... a in Ain
19.
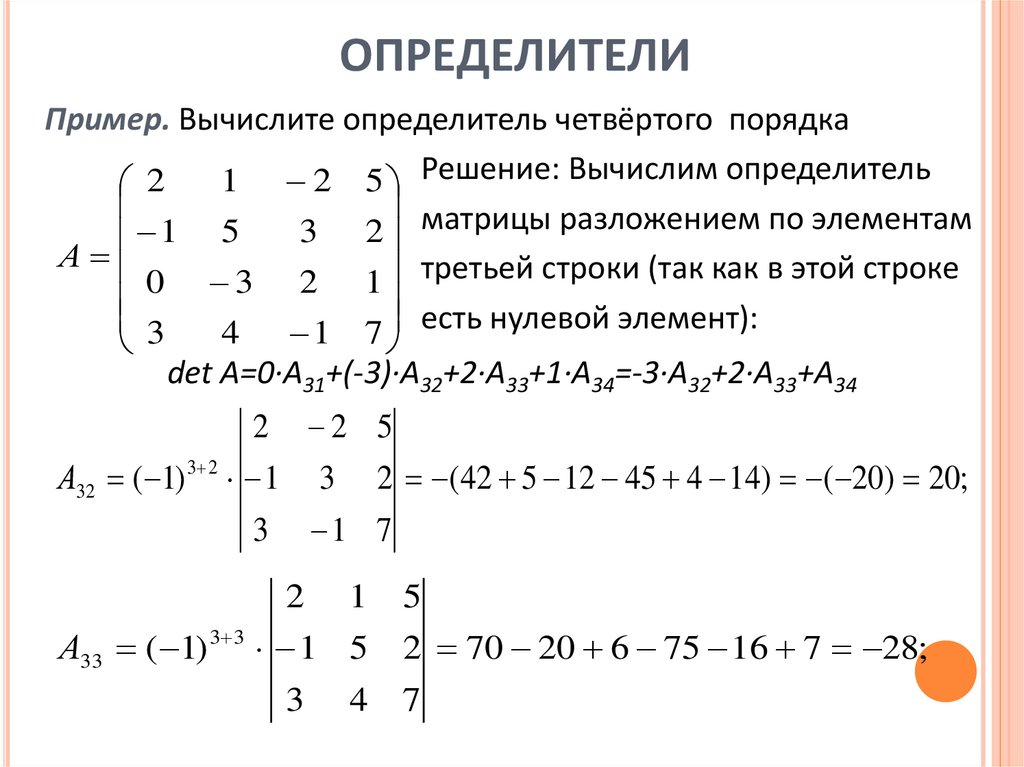
ОПРЕДЕЛИТЕЛИПример. Вычислите определитель четвёртого порядка
1 2 5 Решение: Вычислим определитель
2
матрицы разложением по элементам
3 2
1 5
А
0 3 2 1 третьей строки (так как в этой строке
есть нулевой элемент):
3
4 1 7
det A=0·А31+(-3)·А32+2·А33+1·А34=-3·А32+2·А33+А34
2 5
2
А32 ( 1) 3 2 1
2 (42 5 12 45 4 14) ( 20) 20;
3
1 7
3
2
1
А33 ( 1) 3 3 1 5
3
4
5
2 70 20 6 75 16 7 28;
7
20.
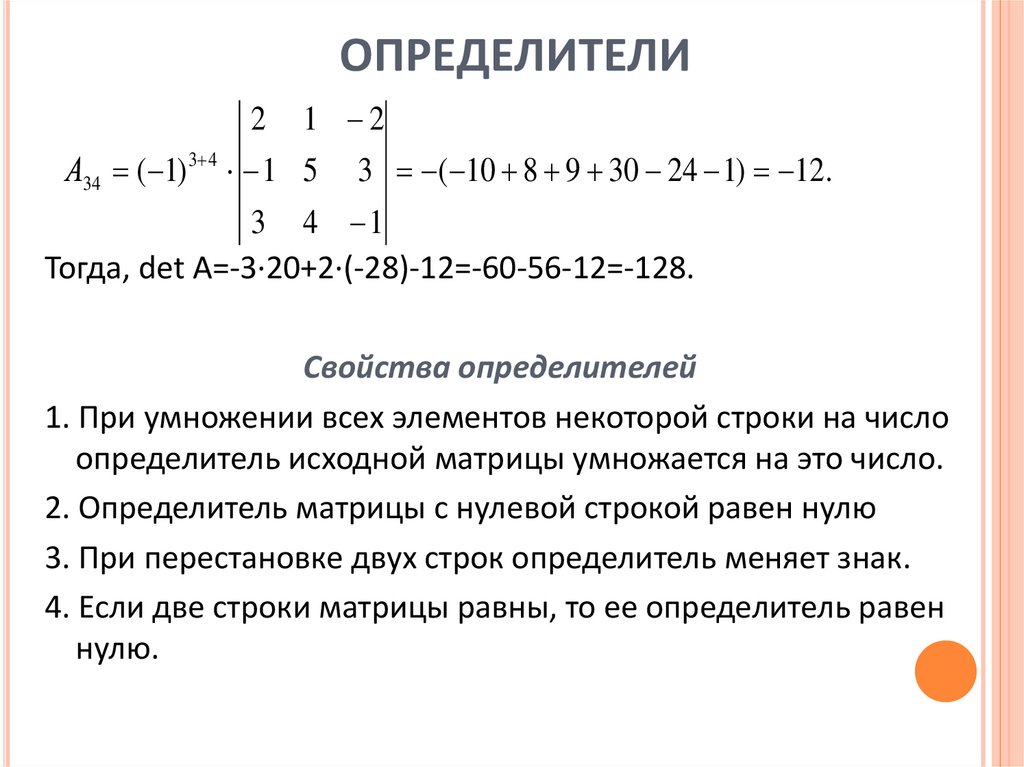
ОПРЕДЕЛИТЕЛИ2
1 2
А34 ( 1) 3 4 1 5
3 ( 10 8 9 30 24 1) 12.
3 4 1
Тогда, det A=-3·20+2·(-28)-12=-60-56-12=-128.
Свойства определителей
1. При умножении всех элементов некоторой строки на число
определитель исходной матрицы умножается на это число.
2. Определитель матрицы с нулевой строкой равен нулю
3. При перестановке двух строк определитель меняет знак.
4. Если две строки матрицы равны, то ее определитель равен
нулю.
21.
ОПРЕДЕЛИТЕЛИ5. Определитель не меняется, если к какой-нибудь строке
матрицы прибавить другую ее строку, умноженную на
число.
6. Определитель произведения двух матриц равен
произведению определителей: det( A B) det A det B.
7. Определитель не меняется при транспонировании
матрицы.
22.
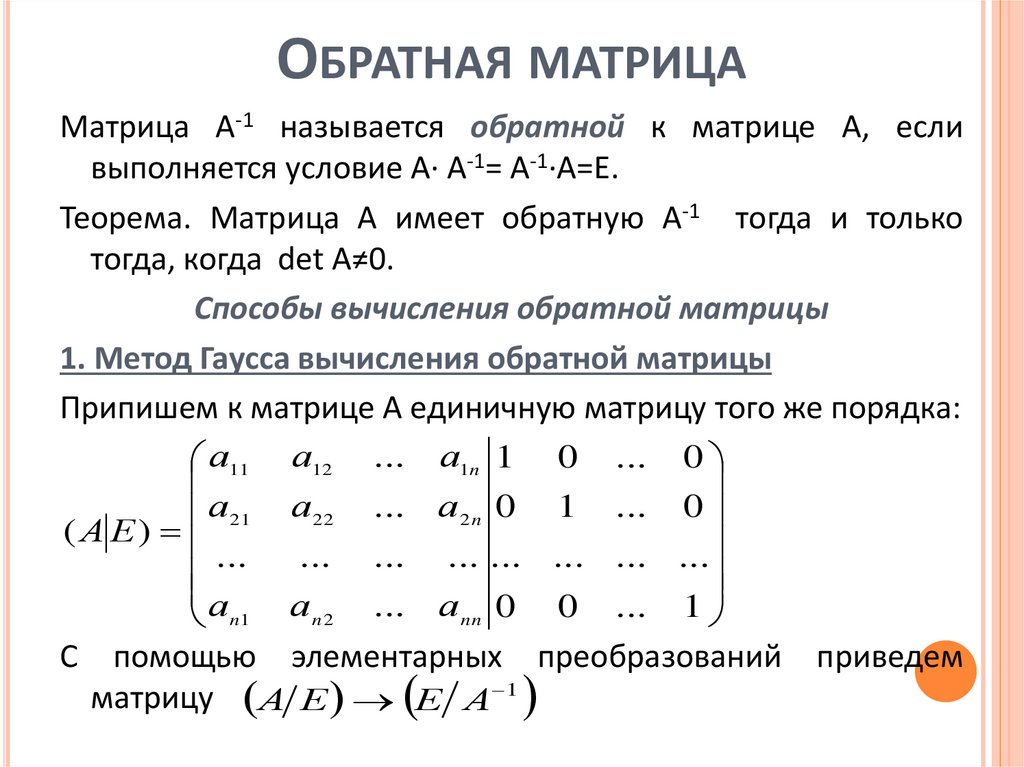
ОБРАТНАЯ МАТРИЦАМатрица А-1 называется обратной к матрице А, если
выполняется условие А· А-1= А-1·А=Е.
Теорема. Матрица А имеет обратную А-1 тогда и только
тогда, когда det A≠0.
Способы вычисления обратной матрицы
1. Метод Гаусса вычисления обратной матрицы
Припишем к матрице А единичную матрицу того же порядка:
а11 а12 ... а1n 1 0 ... 0
а 21 а 22 ... а 2 n 0 1 ... 0
( А Е)
...
... ... ... ... ... ... ...
а n1 а n 2 ... а nn 0 0 ... 1
С помощью элементарных преобразований приведем
матрицу А Е Е А 1
23.
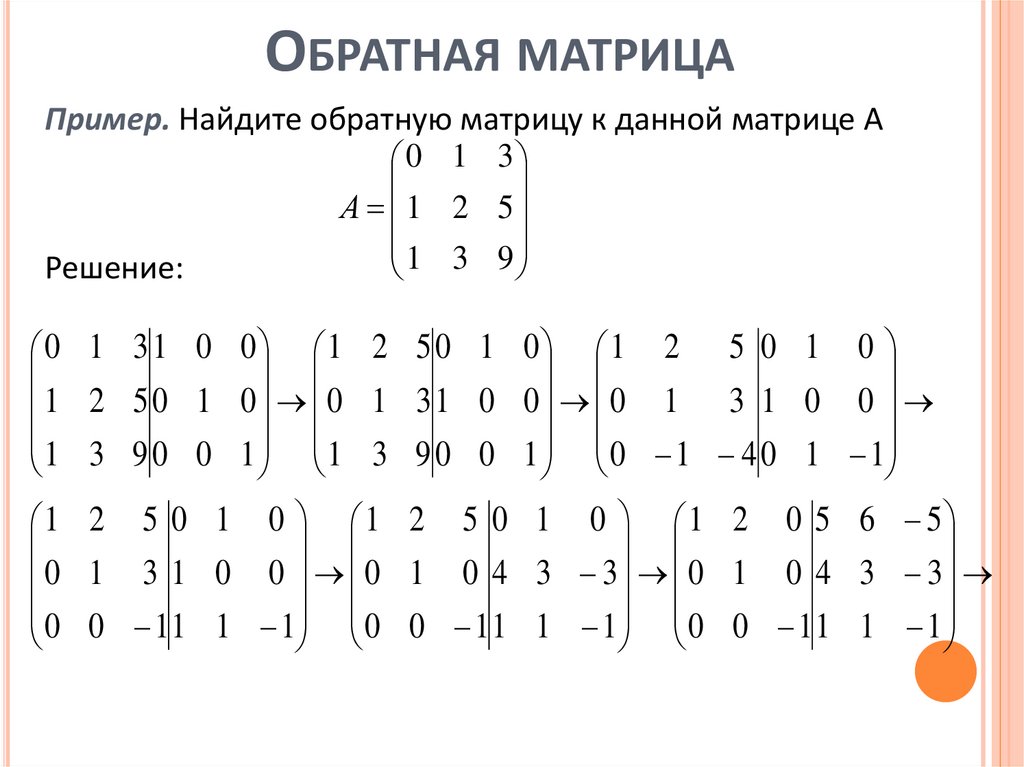
ОБРАТНАЯ МАТРИЦАПример. Найдите обратную матрицу к данной матрице А
0 1 3
А 1 2 5
1 3 9
Решение:
0 1 3 1 0 0 1 2
1 2 5 0 1 0 0 1
1 3 9 0 0 1 1 3
1 2 5 0 1 0 1
0 1 3 1 0 0 0
0 0 1 1 1 1 0
5 0 1 0 1 2 5 0 1 0
3 1 0 0 0 1 3 1 0 0
9 0 0 1 0 1 4 0 1 1
2 5 0 1 0 1 2 0 5 6 5
1 0 4 3 3 0 1 0 4 3 3
0 1 1 1 1 0 0 1 1 1 1
24.
ОБРАТНАЯ МАТРИЦА1
1 0 0 3 0 1 1 0 0 3 0
0 1 0 4 3 3 0 1 0 4 3 3
0 0 1 1 1 1 0 0 1 1 1 1
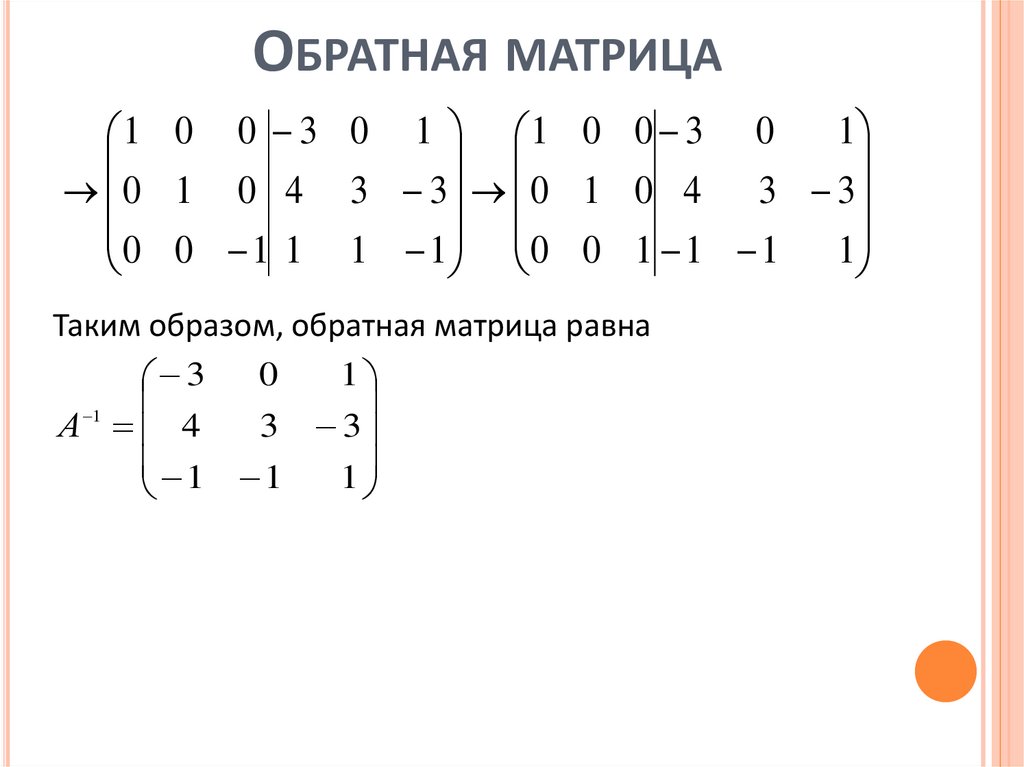
Таким образом, обратная матрица равна
0
1
3
1
А 4
3 3
1 1
1
25.
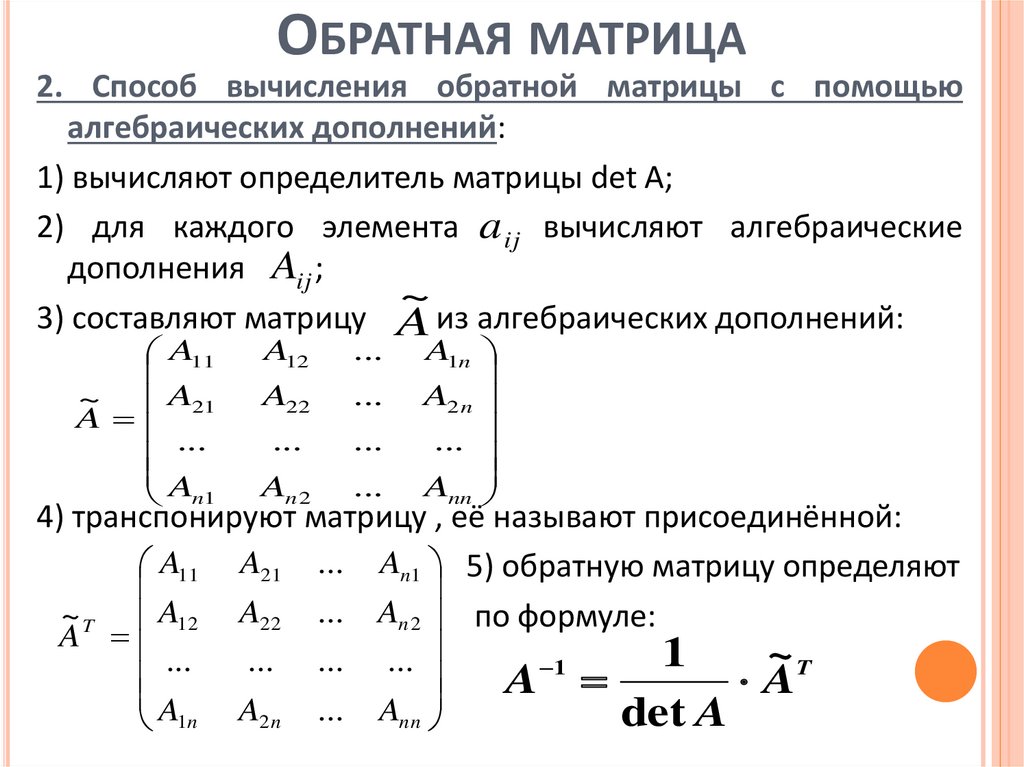
ОБРАТНАЯ МАТРИЦА2. Способ вычисления обратной матрицы с помощью
алгебраических дополнений:
1) вычисляют определитель матрицы det A;
2) для каждого элемента a ij вычисляют алгебраические
дополнения Aij ;
~
3) составляют матрицу A из алгебраических дополнений:
A11
~ A21
A
...
A
n1
A12
...
A22
...
...
...
An 2
...
A1n
A2 n
...
Ann
4) транспонируют матрицу , её называют присоединённой:
A11 A21 ... An1 5) обратную матрицу определяют
~ T A12 A22 ... An 2 по формуле:
A
1
~T
...
... ... ...
1
A
A
A
det A
1n A2 n ... Ann
26.
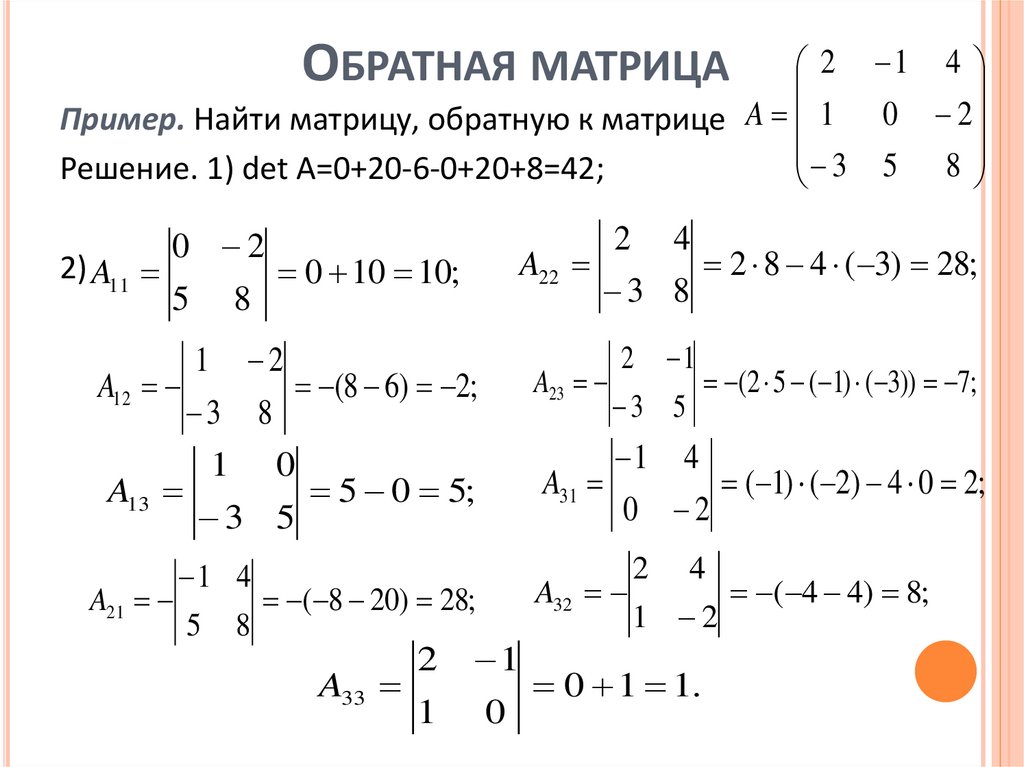
ОБРАТНАЯ МАТРИЦА2 1 4
Пример. Найти матрицу, обратную к матрице A 1 0 2
3 5 8
Решение. 1) det A=0+20-6-0+20+8=42;
2) A11
0 2
5
A12
A13
A21
8
1
2
3
8
1
3 5
5
8
A31
5 0 5;
A33
2
2
1
1
0
1
3 5
2 8 4 ( 3) 28;
(2 5 ( 1) ( 3)) 7;
1
4
0
2
A32
( 8 20) 28;
4
3 8
A23
(8 6) 2;
0
1 4
A22
0 10 10;
2
2
4
1 2
0 1 1.
( 1) ( 2) 4 0 2;
( 4 4) 8;
27.
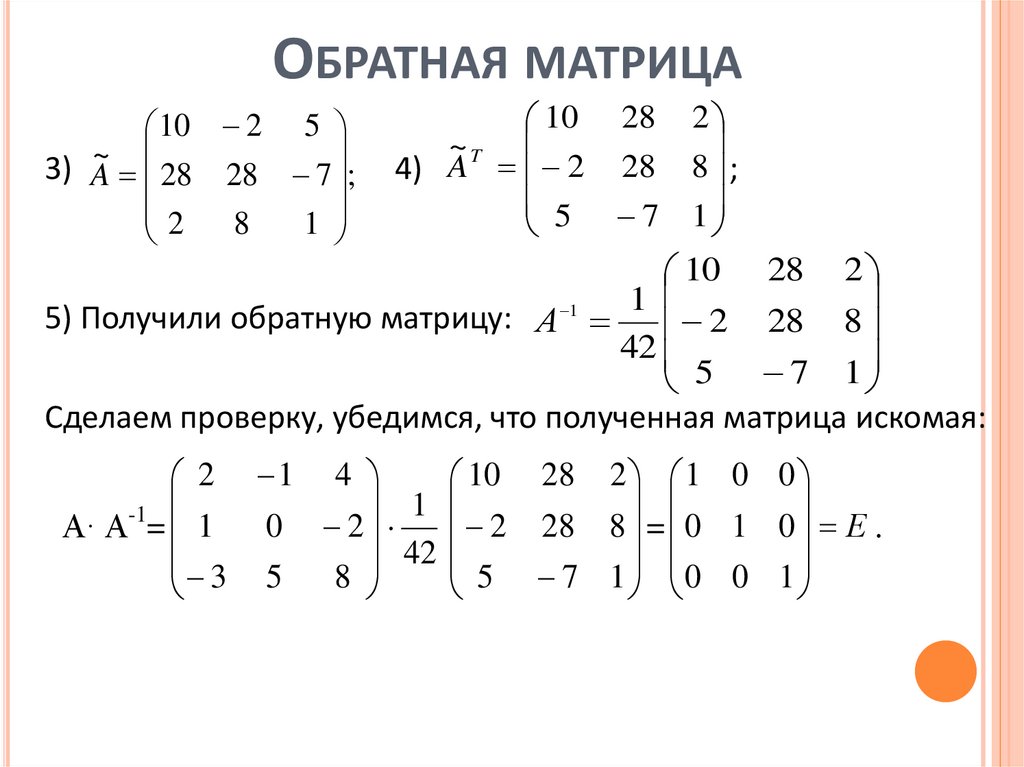
ОБРАТНАЯ МАТРИЦА10 28 2
~T
4) A 2 28 8 ;
5 7 1
10 28 2
1
1
5) Получили обратную матрицу: А
2 28 8
42
5 7 1
Сделаем проверку, убедимся, что полученная матрица искомая:
10 2 5
~
3) A
28 28 7 ;
2
8
1
10 28 2 1 0 0
2 1 4
1
-1
0 2
А· А = 1
2 28 8 = 0 1 0 Е .
42
3 5
8
5 7 1 0 0 1
28.
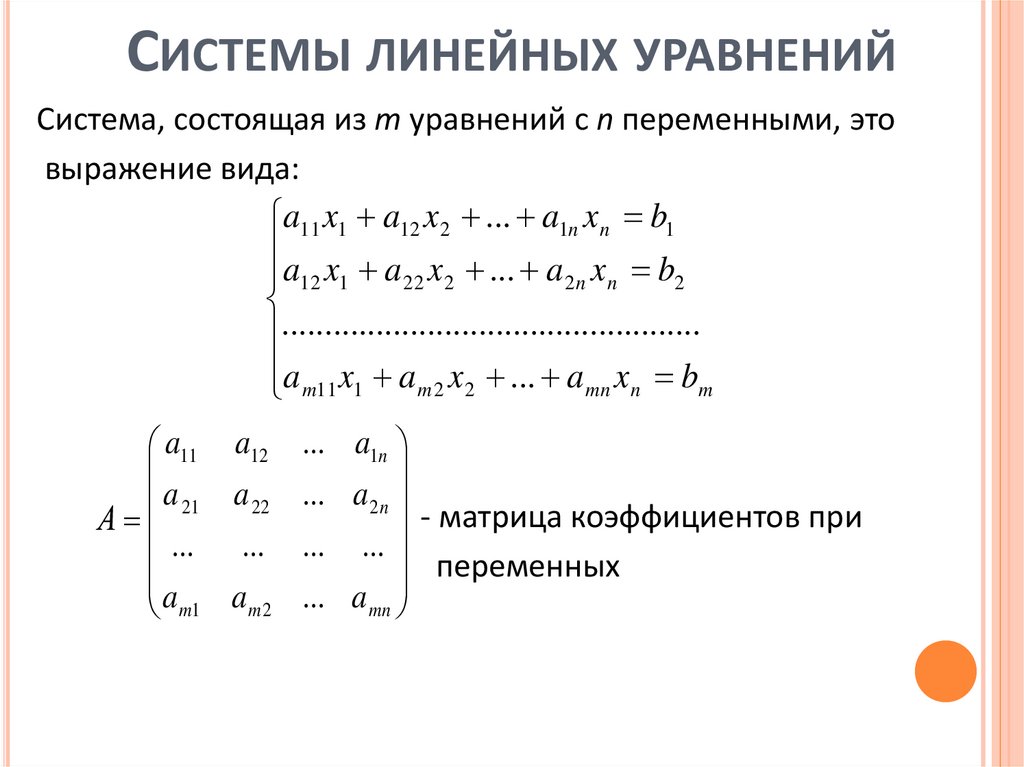
СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙСистема, состоящая из m уравнений с n переменными, это
выражение вида:
a11 x1 a12 x 2 ... a1n x n b1
a x a x ... a x b
12 1
22 2
2n n
2
.................................................
a m11 x1 a m 2 x 2 ... a mn x n bm
a11 a12
a 21 a 22
А
... ...
a
m1 a m 2
... a1n
... a 2 n
- матрица коэффициентов при
... ...
переменных
... a mn
29.
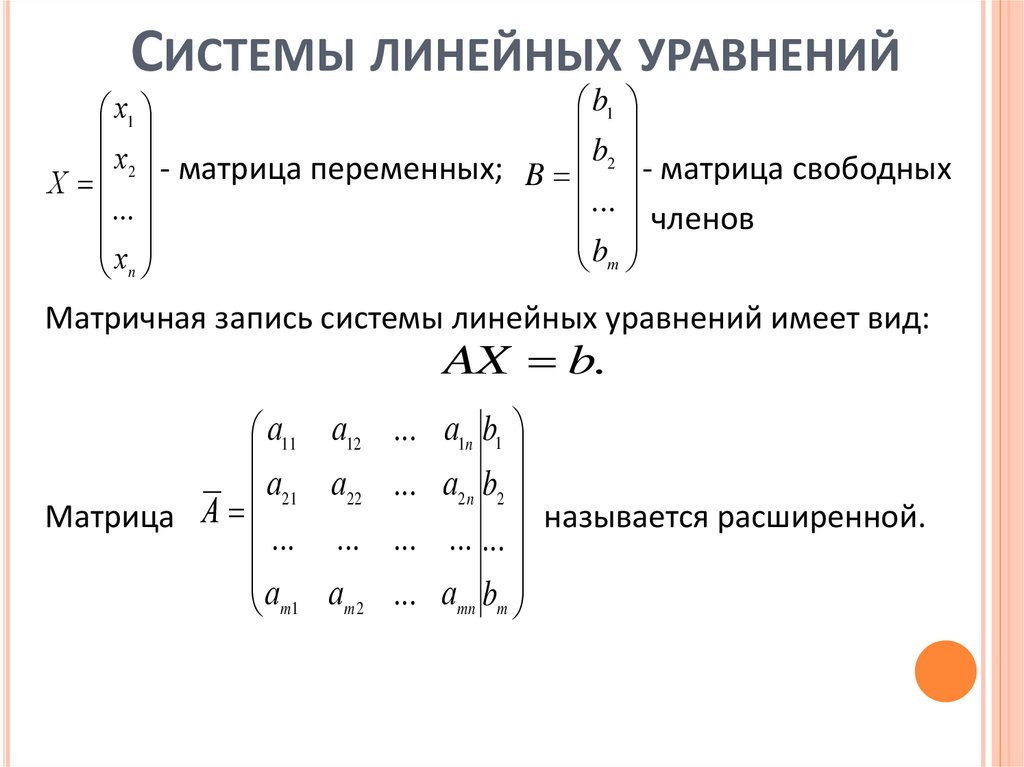
СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙb1
х1
х2 - матрица переменных; B b2 - матрица свободных
Х
...
...
членов
b
х
m
n
Матричная запись системы линейных уравнений имеет вид:
AX b.
а11 а12
а21 а22
Матрица А
... ...
аm1 аm 2
... а1n b1
... а2 n b2
называется расширенной.
... ... ...
... аmn bm
30.
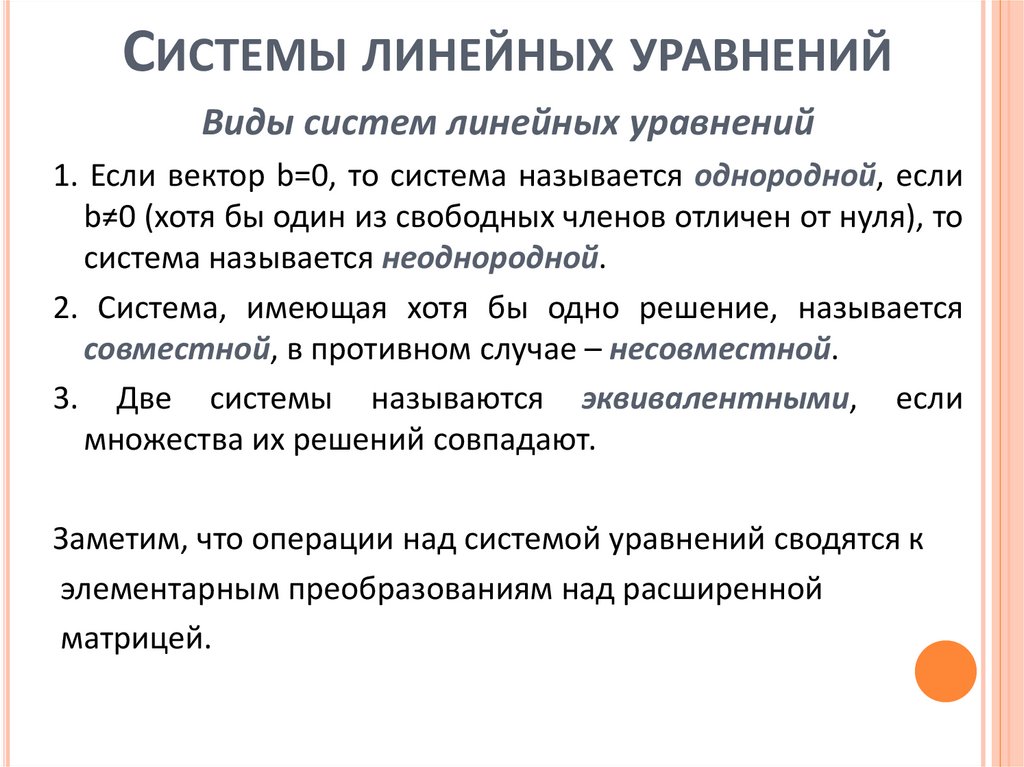
СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙВиды систем линейных уравнений
1. Если вектор b=0, то система называется однородной, если
b≠0 (хотя бы один из свободных членов отличен от нуля), то
система называется неоднородной.
2. Система, имеющая хотя бы одно решение, называется
совместной, в противном случае – несовместной.
3. Две системы называются эквивалентными, если
множества их решений совпадают.
Заметим, что операции над системой уравнений сводятся к
элементарным преобразованиям над расширенной
матрицей.
31.
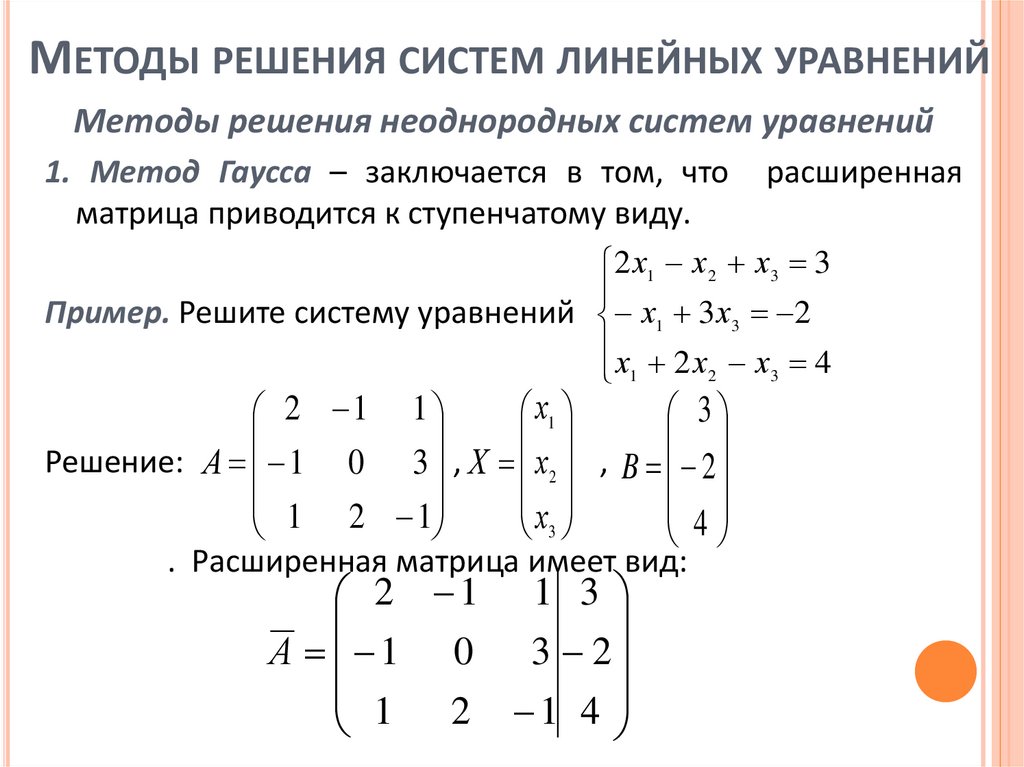
МЕТОДЫ РЕШЕНИЯ СИСТЕМ ЛИНЕЙНЫХ УРАВНЕНИЙМетоды решения неоднородных систем уравнений
1. Метод Гаусса – заключается в том, что расширенная
матрица приводится к ступенчатому виду.
2 х1 х2 х3 3
Пример. Решите систему уравнений х1 3 х3 2
х 2х х 4
2
3
1
х1
2 1 1
3
Решение: А 1 0 3 , Х х2 , B 2
1 2 1
х
4
3
. Расширенная матрица имеет вид:
2 1 1 3
А 1 0 3 2
1 2 1 4
32.
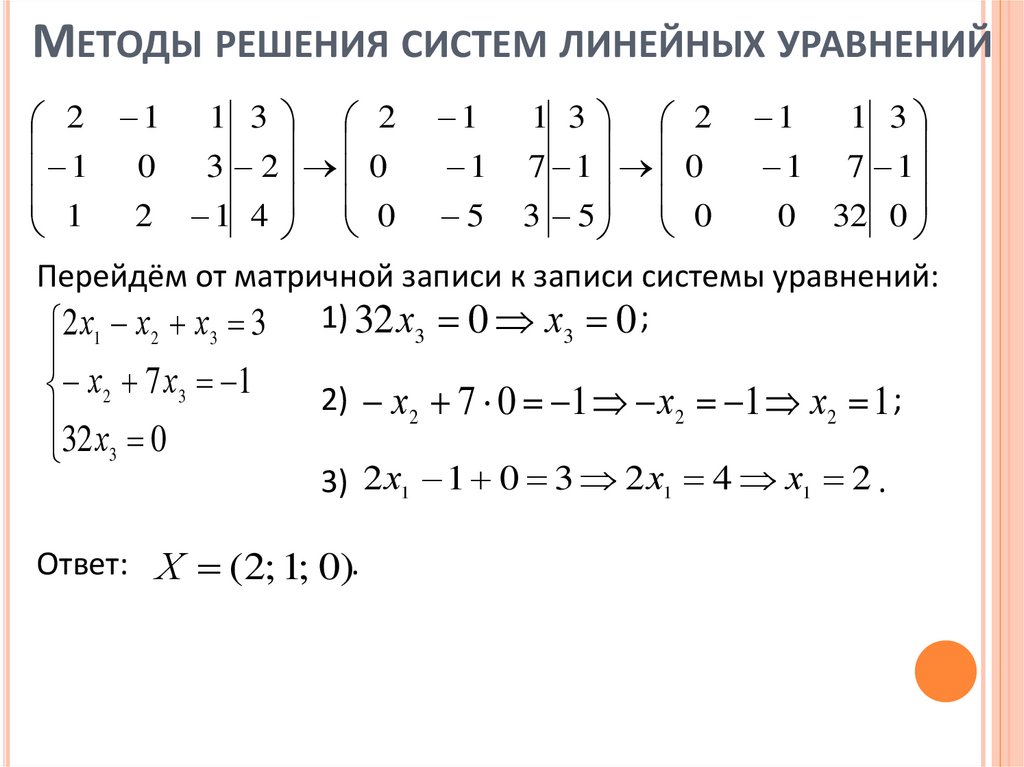
МЕТОДЫ РЕШЕНИЯ СИСТЕМ ЛИНЕЙНЫХ УРАВНЕНИЙ2 1 1 3 2
3 2 0
1 0
0
1
2
1
4
1
1
5
1 3 2
7 1 0
3 5 0
1
1 3
1 7 1
0 32 0
Перейдём от матричной записи к записи системы уравнений:
2 х1 х2 х3 3 1) 32 х3 0 х3 0 ;
х 2 7 х 3 1
32 х 0
3
2) х2 7 0 1 х2 1 х2 1 ;
3) 2 х1 1 0 3 2 х1 4 х1 2 .
Ответ: Х (2; 1; 0).
33.
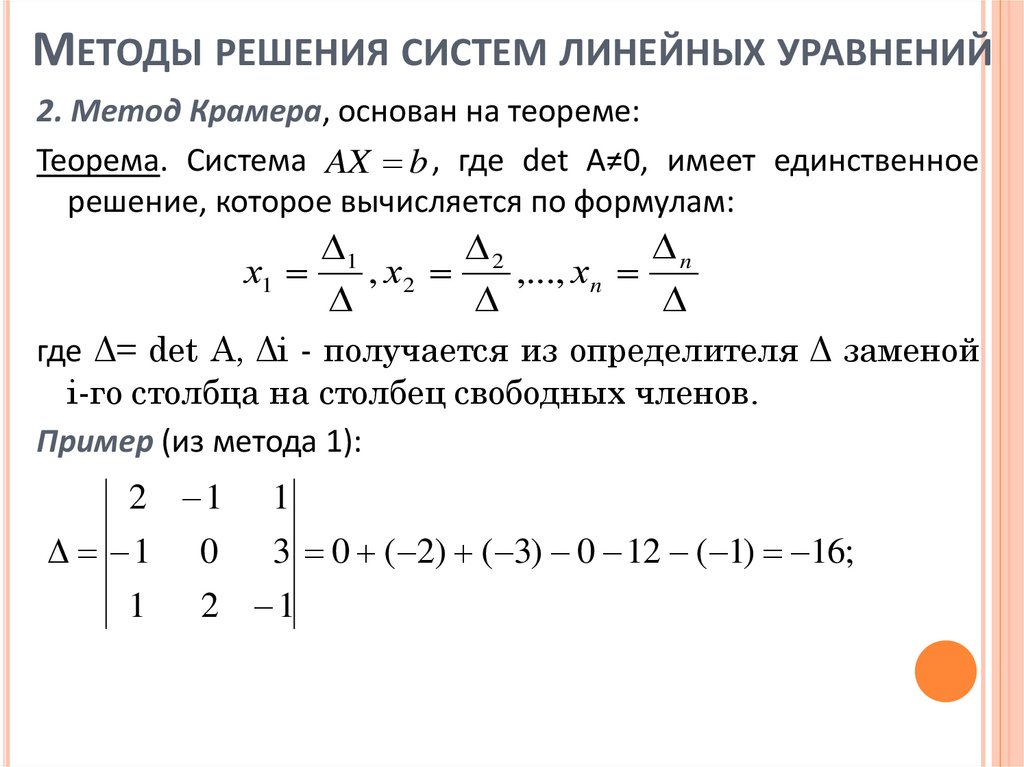
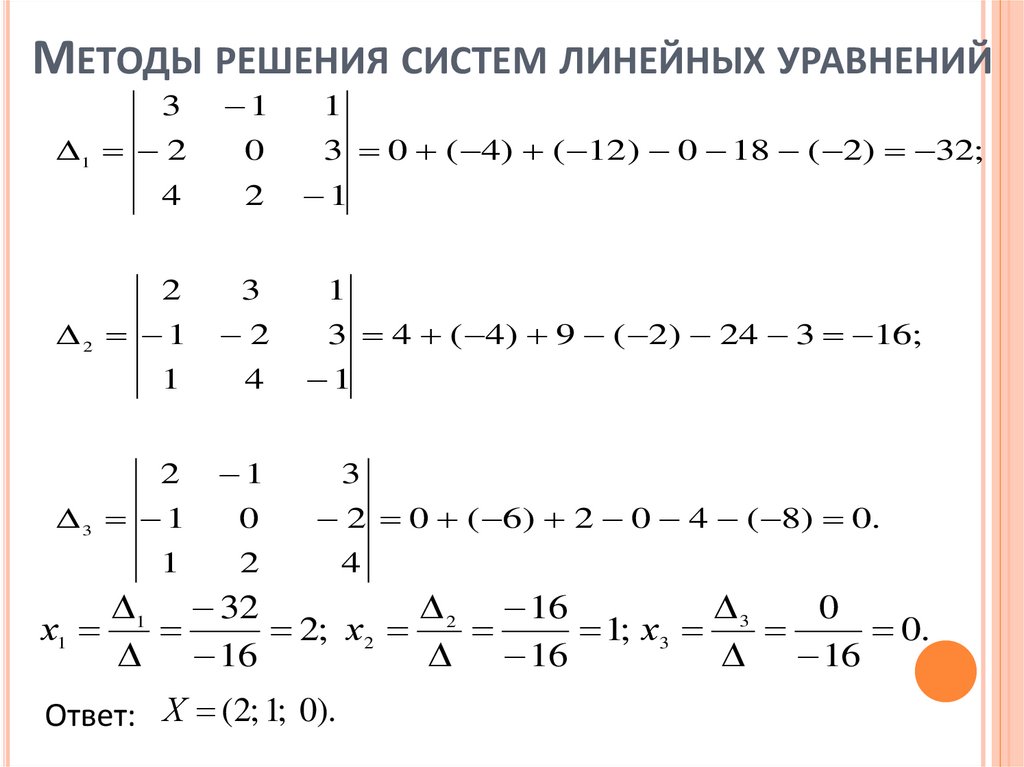
МЕТОДЫ РЕШЕНИЯ СИСТЕМ ЛИНЕЙНЫХ УРАВНЕНИЙ2. Метод Крамера, основан на теореме:
Теорема. Система AX b , где det A≠0, имеет единственное
решение, которое вычисляется по формулам:
n
1
2
х1
, х2
,..., хn
где Δ= det A, Δi - получается из определителя Δ заменой
i-го столбца на столбец свободных членов.
Пример (из метода 1):
2 1
1
1
0
1
3 0 ( 2) ( 3) 0 12 ( 1) 16;
2 1
34.
МЕТОДЫ РЕШЕНИЯ СИСТЕМ ЛИНЕЙНЫХ УРАВНЕНИЙ3
1
1 2
0
4
2
1
2
3
1
2 1
2
1
4
2
1
3 1
0
1
2
1
3 0 ( 4) ( 12) 0 18 ( 2) 32;
3 4 ( 4) 9 ( 2) 24 3 16;
1
3
2 0 ( 6) 2 0 4 ( 8) 0.
4
3
1 32
2 16
0
х1
2; х2
1; х3
0.
16
16
16
Ответ: Х (2; 1; 0).
35.
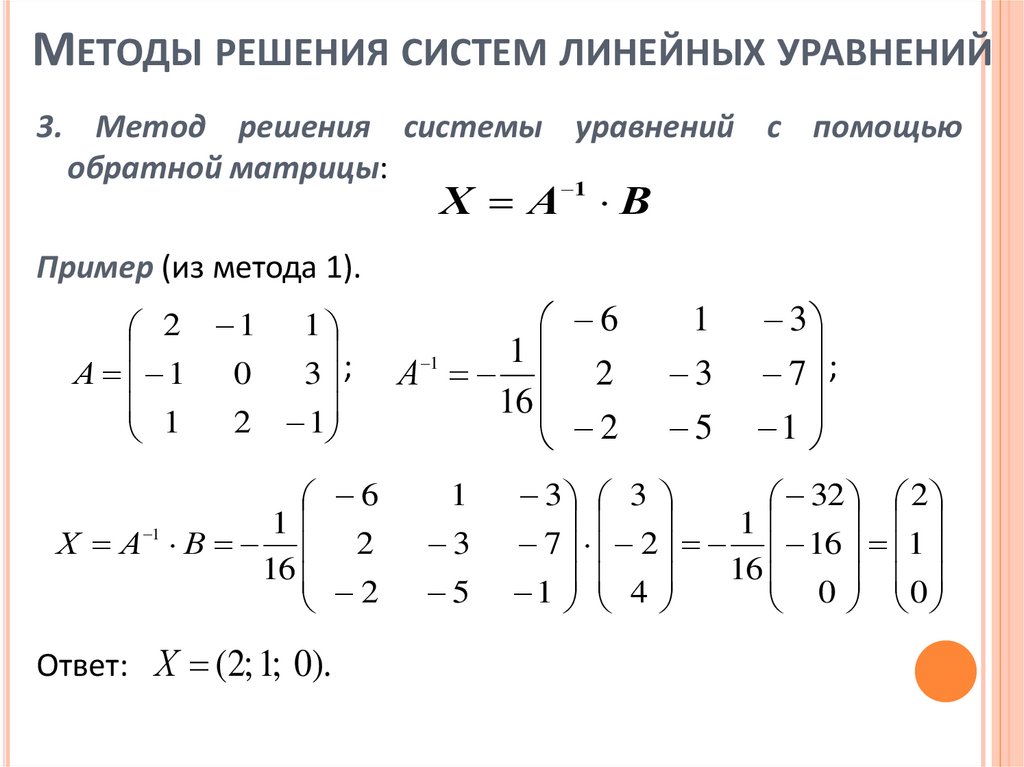
МЕТОДЫ РЕШЕНИЯ СИСТЕМ ЛИНЕЙНЫХ УРАВНЕНИЙ3. Метод решения системы уравнений с помощью
обратной матрицы:
1
Х А В
Пример (из метода 1).
2 1 1
А 1 0
3 ;
1
2
1
6
1
1
Х А В 2
16
2
Ответ: Х (2; 1; 0).
6
1
1
А 2
16
2
1
3
5
1
3
5
3
7 ;
1
3 3
32 2
1
7 2 16 1
16
0
1 4
0
36.
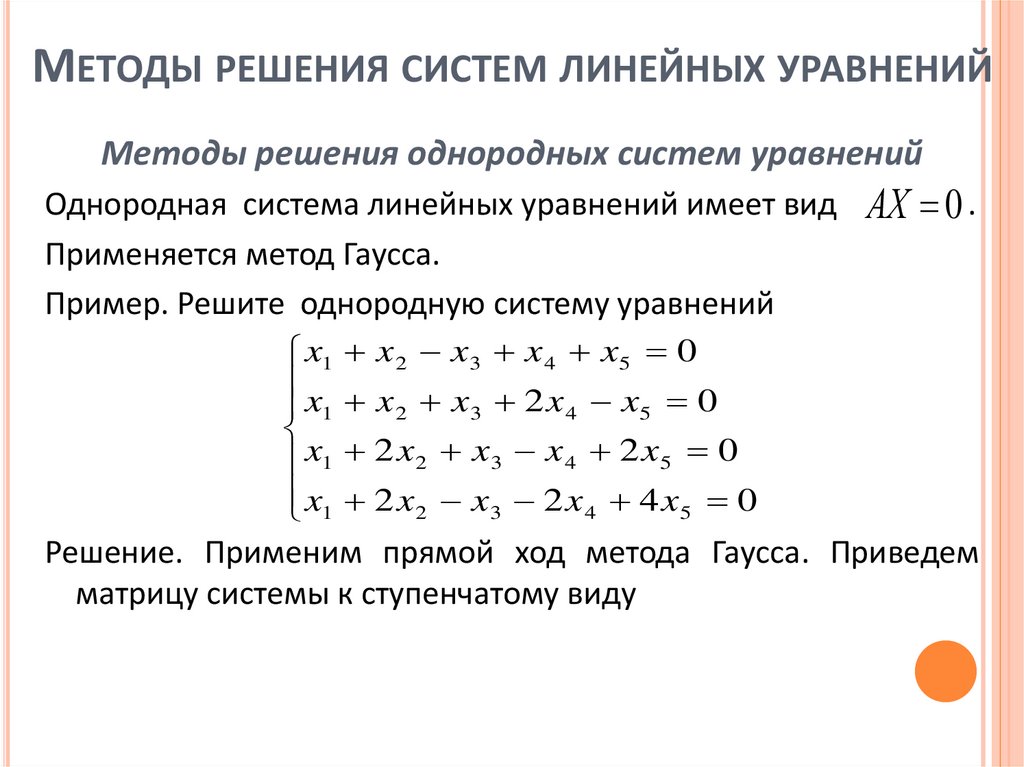
МЕТОДЫ РЕШЕНИЯ СИСТЕМ ЛИНЕЙНЫХ УРАВНЕНИЙМетоды решения однородных систем уравнений
Однородная система линейных уравнений имеет вид
Применяется метод Гаусса.
Пример. Решите однородную систему уравнений
x1 x 2 x3 x 4 x5 0
x x x 2x x 0
1
2
3
4
5
x1 2 x 2 x3 x 4 2 x5 0
x1 2 x 2 x3 2 x 4 4 x5 0
АХ 0 .
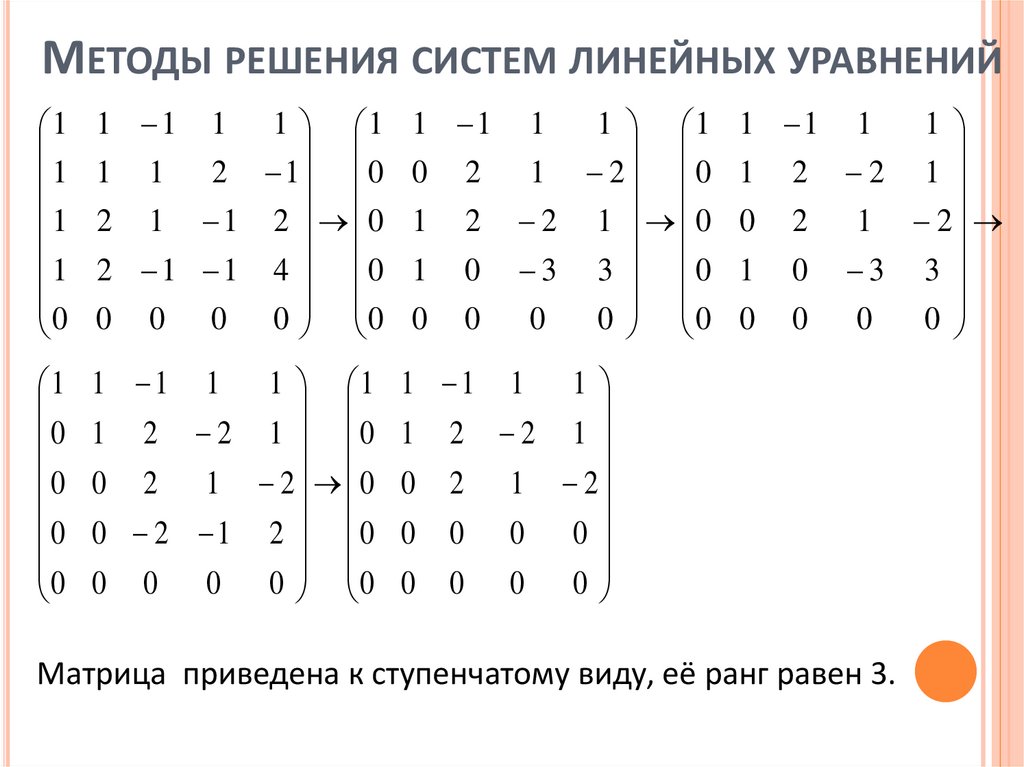
Решение. Применим прямой ход метода Гаусса. Приведем
матрицу системы к ступенчатому виду
37.
МЕТОДЫ РЕШЕНИЯ СИСТЕМ ЛИНЕЙНЫХ УРАВНЕНИЙ1
1
1
1
0
1 1
1
0
0
0
0
1 1
1
2
2
0
1
0
0
0
1 1
1 2 1 0
1 1 2 0
1 1 4 0
0 0 0 0
1
1 1
2 2 1 0
2 1 2 0
2 1 2 0
0 0 0 0
1
1 1
0
2
1
2
1
0
0
0
1 1
1
2
0
2
0
0
0
0
1 1
1 2 0
2 1 0
3 3 0
0
0 0
1
1 1
1
2
0
2
1
0
0
0
1
2 1
1 2
3 3
0
0
1
1
2 1
1 2
0 0
0 0
1
Матрица приведена к ступенчатому виду, её ранг равен 3.
38.
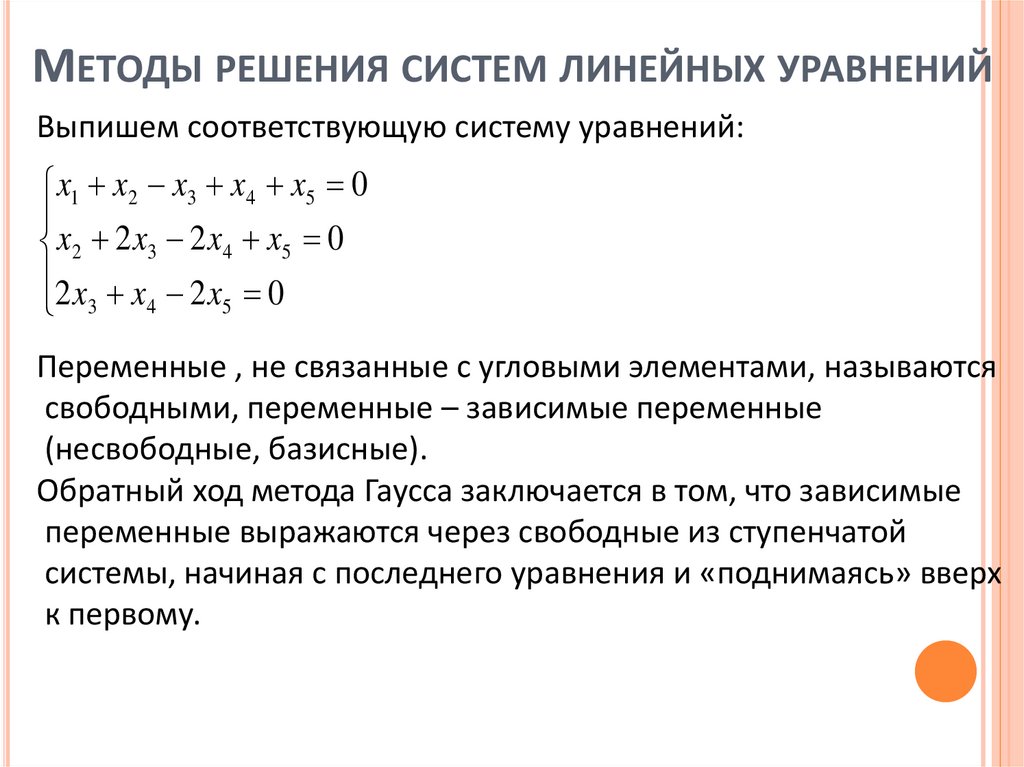
МЕТОДЫ РЕШЕНИЯ СИСТЕМ ЛИНЕЙНЫХ УРАВНЕНИЙВыпишем соответствующую систему уравнений:
x1 x2 x3 x4 x5 0
x 2 2 x3 2 x 4 x5 0
2 x x 2 x 0
5
3 4
Переменные , не связанные с угловыми элементами, называются
свободными, переменные – зависимые переменные
(несвободные, базисные).
Обратный ход метода Гаусса заключается в том, что зависимые
переменные выражаются через свободные из ступенчатой
системы, начиная с последнего уравнения и «поднимаясь» вверх
к первому.
39.
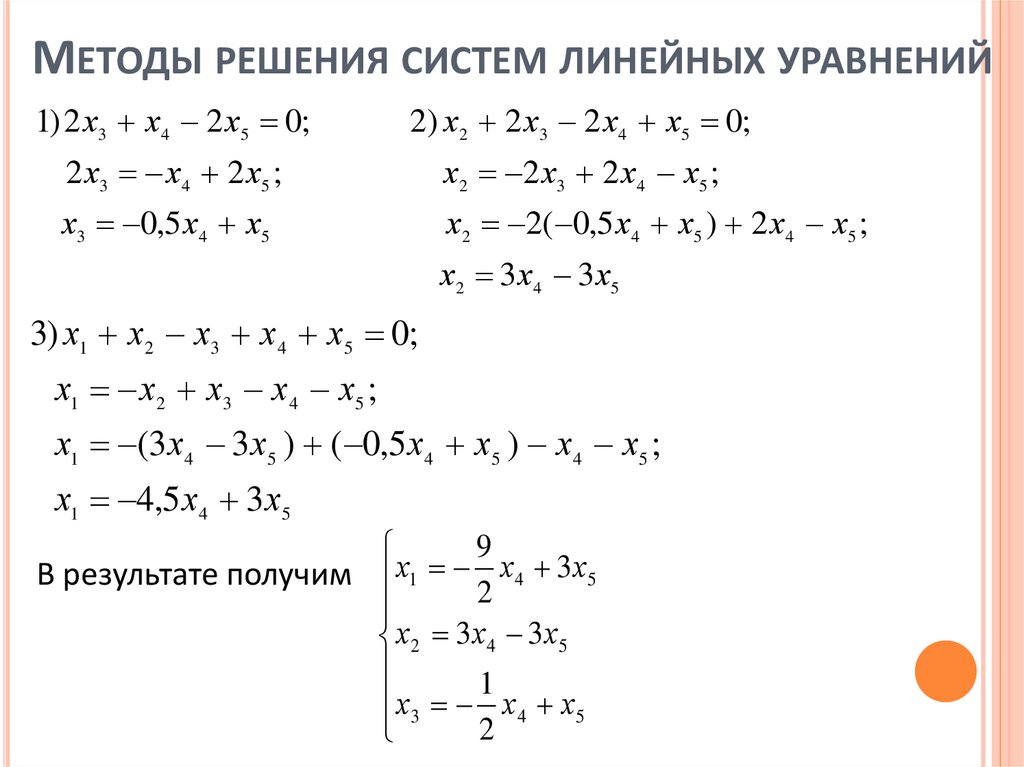
МЕТОДЫ РЕШЕНИЯ СИСТЕМ ЛИНЕЙНЫХ УРАВНЕНИЙ1) 2 х3 х4 2 х5 0;
2) х2 2 х3 2 х4 х5 0;
2 х3 х 4 2 х5 ;
х2 2 х3 2 х4 х5 ;
х3 0,5 х4 х5
х2 2( 0,5 х4 х5 ) 2 х4 х5 ;
х 2 3 х 4 3 х5
3) х1 х2 х3 х4 х5 0;
х1 х2 х3 х4 х5 ;
х1 (3 х4 3 х5 ) ( 0,5 х4 х5 ) х4 х5 ;
х1 4,5 х4 3 х5
9
В результате получим х1 х 4 3х5
2
х 2 3 х 4 3 х5
1
х3 х 4 х5
2
40.
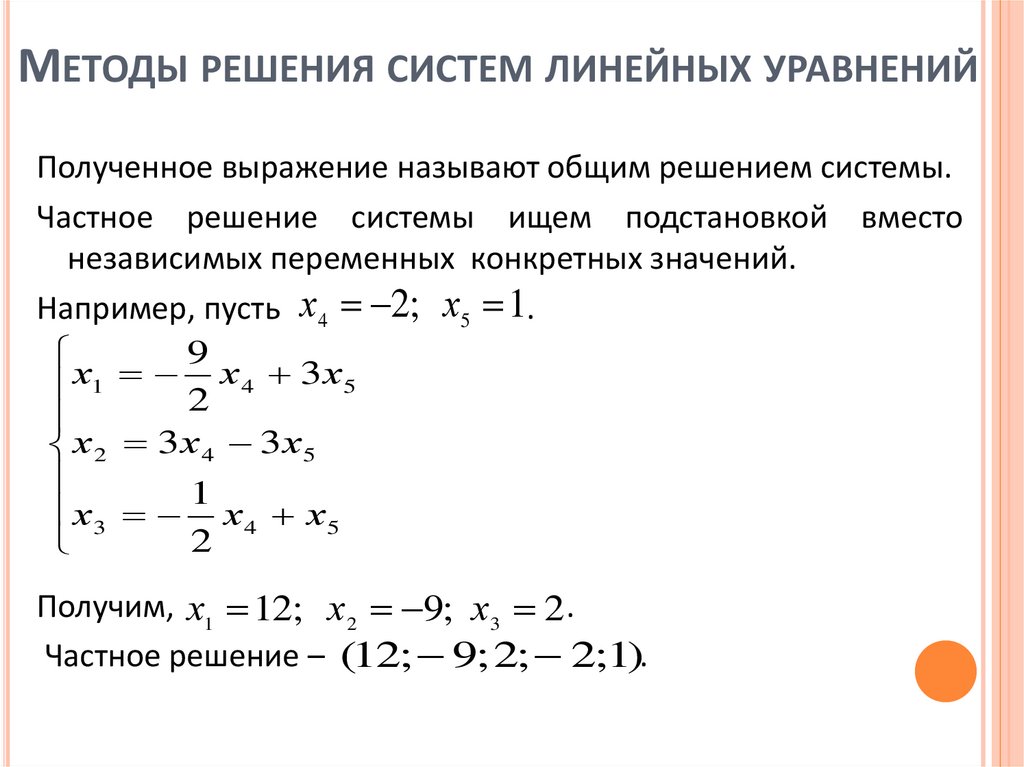
МЕТОДЫ РЕШЕНИЯ СИСТЕМ ЛИНЕЙНЫХ УРАВНЕНИЙПолученное выражение называют общим решением системы.
Частное решение системы ищем подстановкой вместо
независимых переменных конкретных значений.
Например, пусть х4 2; х5 1.
9
х1 2 х 4 3 х5
х 2 3 х 4 3 х5
1
х3 х 4 х5
2
Получим, х1 12; х2 9; х3 2 .
Частное решение – (12; 9; 2; 2;1).
41.
Аналитическая геометрия42.
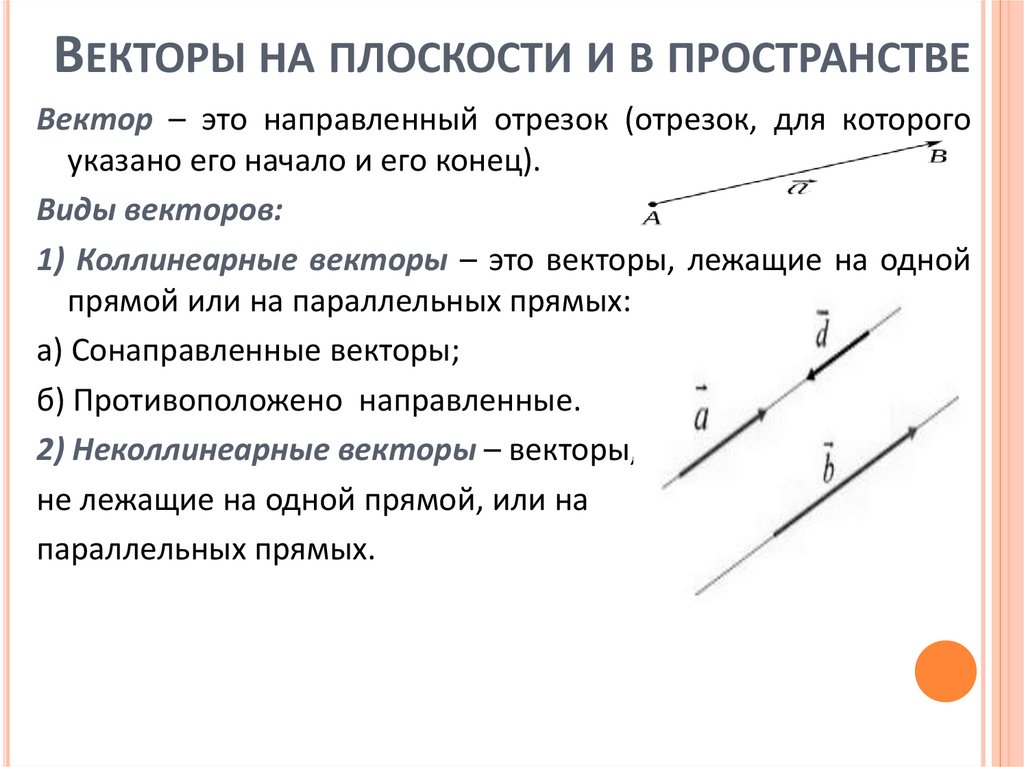
ВЕКТОРЫ НА ПЛОСКОСТИ И В ПРОСТРАНСТВЕВектор – это направленный отрезок (отрезок, для которого
указано его начало и его конец).
Виды векторов:
1) Коллинеарные векторы – это векторы, лежащие на одной
прямой или на параллельных прямых:
а) Сонаправленные векторы;
б) Противоположено направленные.
2) Неколлинеарные векторы – векторы,
не лежащие на одной прямой, или на
параллельных прямых.
43.
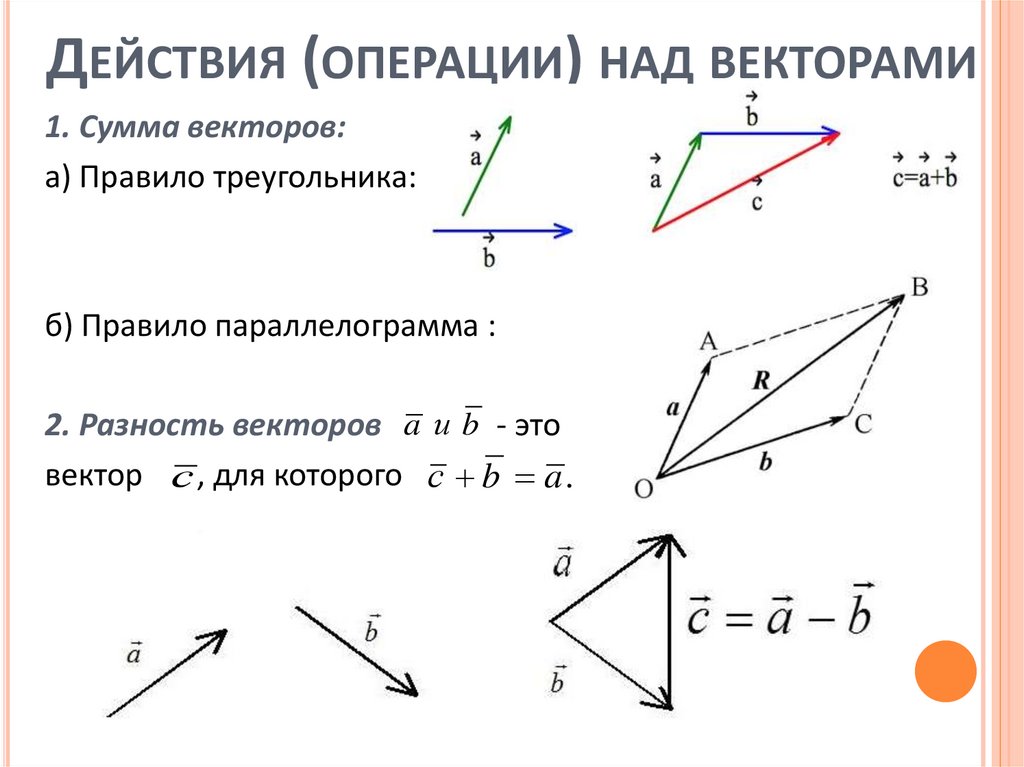
ДЕЙСТВИЯ (ОПЕРАЦИИ) НАД ВЕКТОРАМИ1. Сумма векторов:
а) Правило треугольника:
б) Правило параллелограмма :
2. Разность векторов a и b - это
вектор с , для которого с b a .
44.
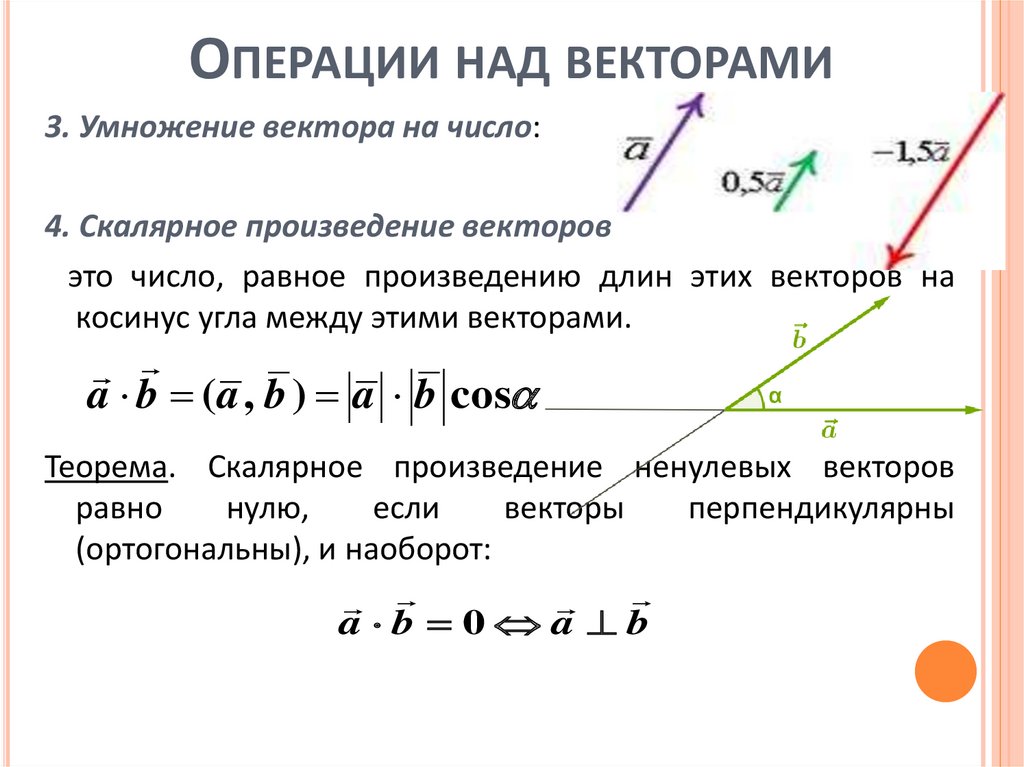
ОПЕРАЦИИ НАД ВЕКТОРАМИ3. Умножение вектора на число:
4. Скалярное произведение векторов –
это число, равное произведению длин этих векторов на
косинус угла между этими векторами.
a b (a , b ) a b cos
Теорема. Скалярное произведение ненулевых векторов
равно
нулю,
если
векторы
перпендикулярны
(ортогональны), и наоборот:
a b 0 a b
45.
ОПЕРАЦИИ НАД ВЕКТОРАМИ5. Векторное произведение векторов a и b - это вектор с ,
который удовлетворяет следующим условиям:
1) с а b sin ;
2)
с а и с b
;
3) векторы образуют «правую» тройку
векторов.
Обозначение: a b
Теорема. Модуль векторного произведения (длина вектора)
численно равен площади параллелограмма, построенного на
векторах a и b :
S парал.
a b
46.
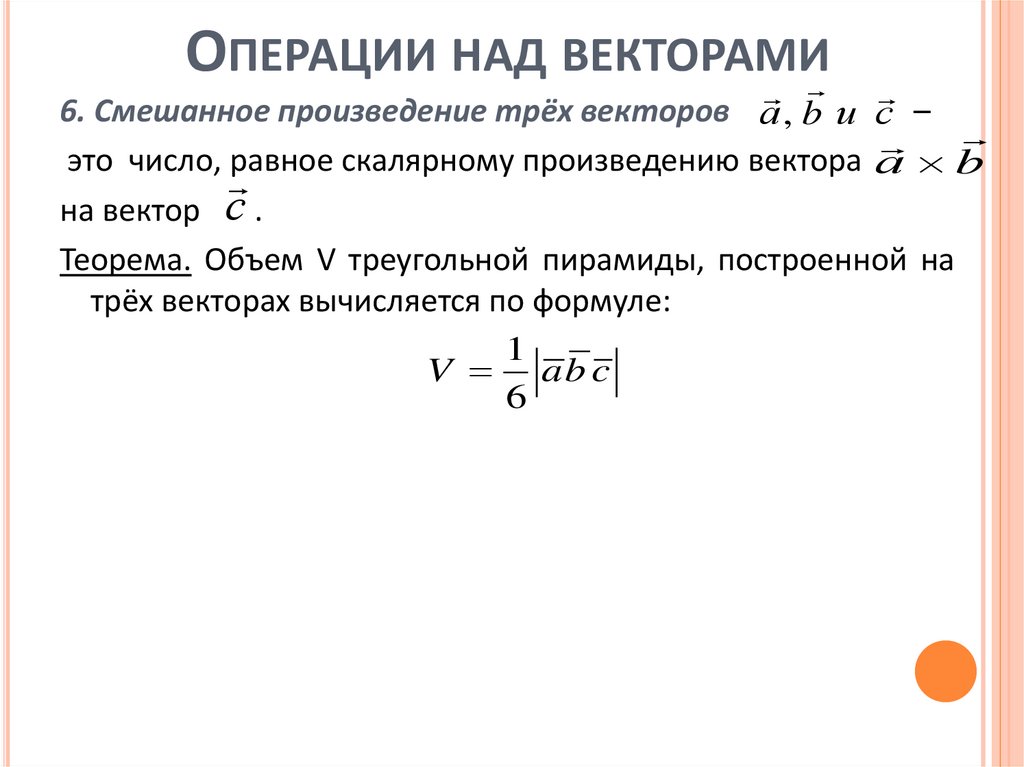
ОПЕРАЦИИ НАД ВЕКТОРАМИ6. Смешанное произведение трёх векторов а , b и с –
это число, равное скалярному произведению вектора а b
на вектор с .
Теорема. Объем V треугольной пирамиды, построенной на
трёх векторах вычисляется по формуле:
1
V ab c
6
47.
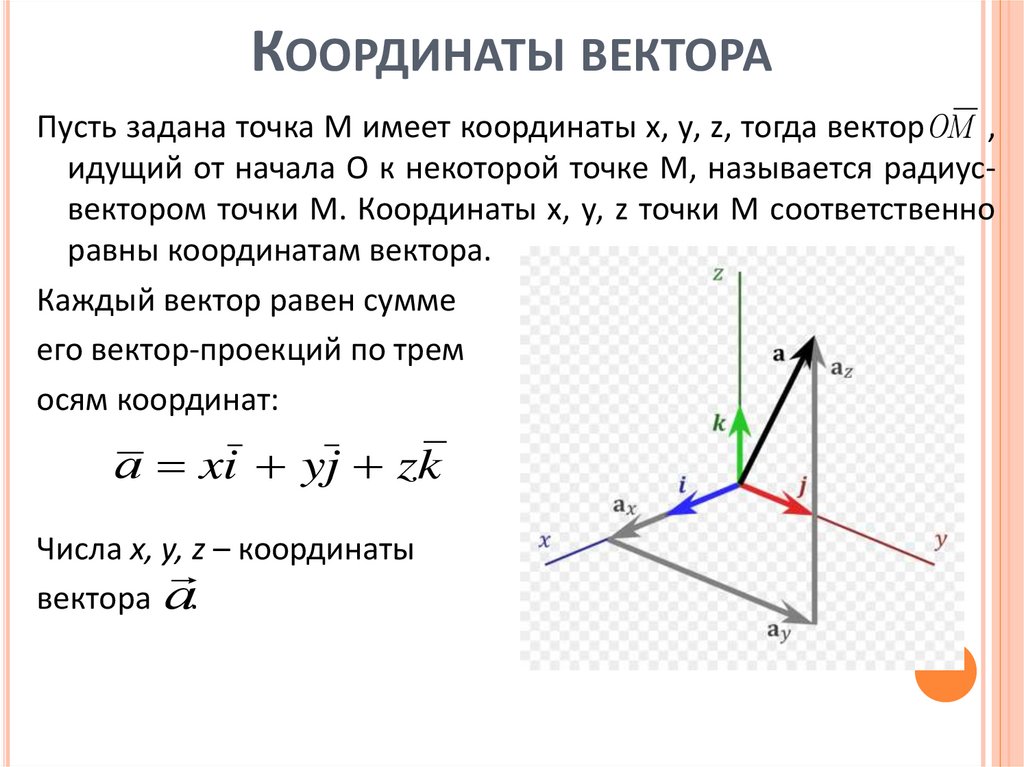
КООРДИНАТЫ ВЕКТОРАПусть задана точка М имеет координаты х, у, z, тогда вектор ОМ ,
идущий от начала О к некоторой точке М, называется радиусвектором точки М. Координаты х, у, z точки М соответственно
равны координатам вектора.
Каждый вектор равен сумме
его вектор-проекций по трем
осям координат:
а xi yj zk
Числа х, у, z – координаты
вектора а.
48.
ОПЕРАЦИИ НАД ВЕКТОРАМИ В КООРДИНАТНОЙ ФОРМЕ1. При сложении векторов, заданных в координатной форме,
их координаты складываются.
2. При вычитании векторов, заданных в координатной
форме, их координаты вычитаются.
3. При умножении вектора на число надо все его координаты
умножить на это число.
4. Скалярное произведение векторов, заданных в
координатной форме, определяется числом вида
(а , b ) a b x1 x2 y1 y 2 z1 z 2
49.
ОПЕРАЦИИ НАД ВЕКТОРАМИ В КООРДИНАТНОЙ ФОРМЕ5. Векторное произведение векторов а ( х1 , y1 , z1 ) и b ( х2 , y 2 , z 2 )
в координатной форме вычисляется следующим образом:
6.
i
j
k
а b x1
y1
z1 i
x2
y2
z2
y1
z1
y2
z2
j
Смешанное произведение в
вычисляется следующим образом:
x1
z1
x2
z2
k
x1
y1
x2
y2
координатной
x1
y1
z1
a b c x2
y2
z2 .
x3
y3
z3
.
форме
50.
ОПЕРАЦИИ НАД ВЕКТОРАМИ В КООРДИНАТНОЙ ФОРМЕПример 1. Найдите косинус угла между векторами с 3а 2b
и d а 2b , где а ( 1; 2; 0), b (3; 1; 2).
Решение:
1) с 3а 2b 3( 1; 2; 0) 2(3; 1; 2) ( 3; 6; 0) (6; 2; 4) ( 9; 4; 4)
d а 2b ( 1; 2; 0) 2(3; 1; 2) ( 1; 2; 0) (6; 2; 4) (5; 4; 4)
2) c d 9 5 4 4 4 ( 4) 45;
3) Длину каждого вектора определим по формуле: а х 2 y 2 z 2
2
2
2
2
2
2
d
5
4
(
4
)
57 .
c ( 9) 4 4 113;
45
45
4) cos c d
.
113 57
6441
c d
51.
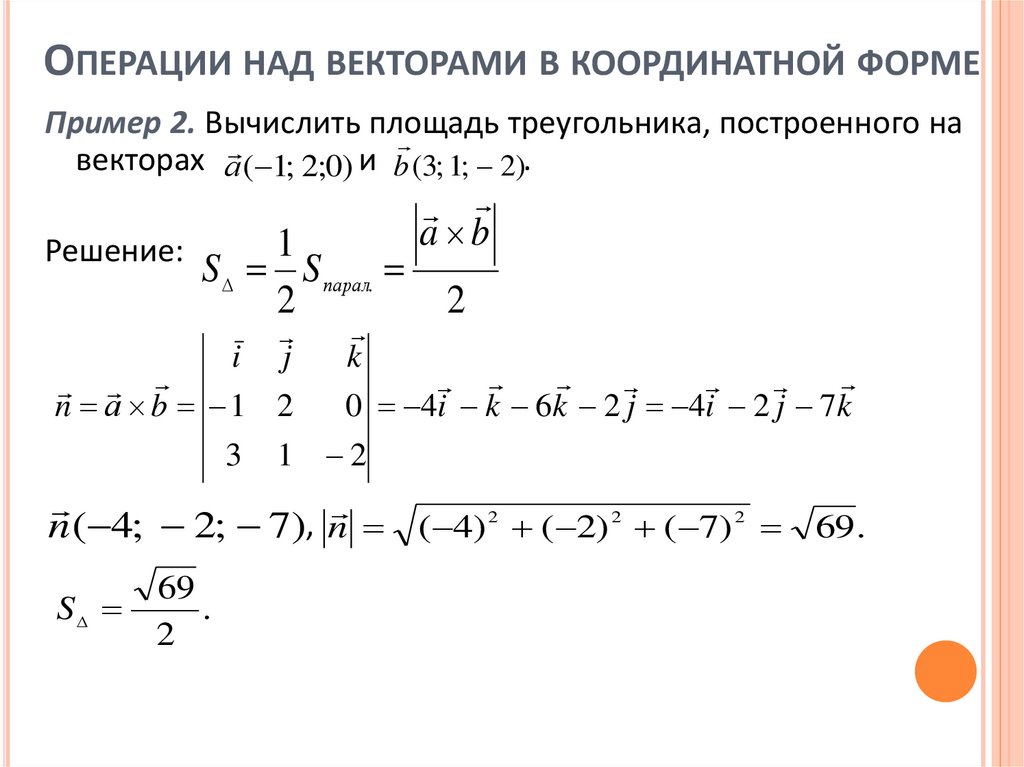
ОПЕРАЦИИ НАД ВЕКТОРАМИ В КООРДИНАТНОЙ ФОРМЕПример 2. Вычислить площадь
треугольника, построенного на
векторах а ( 1; 2;0) и b (3; 1; 2).
Решение:
1
S S парал.
2
k
i
j
3
1 2
n а b 1 2
a b
2
0 4i k 6k 2 j 4i 2 j 7k
n ( 4; 2; 7), n ( 4) 2 ( 2) 2 ( 7) 2 69 .
S
69
.
2
52.
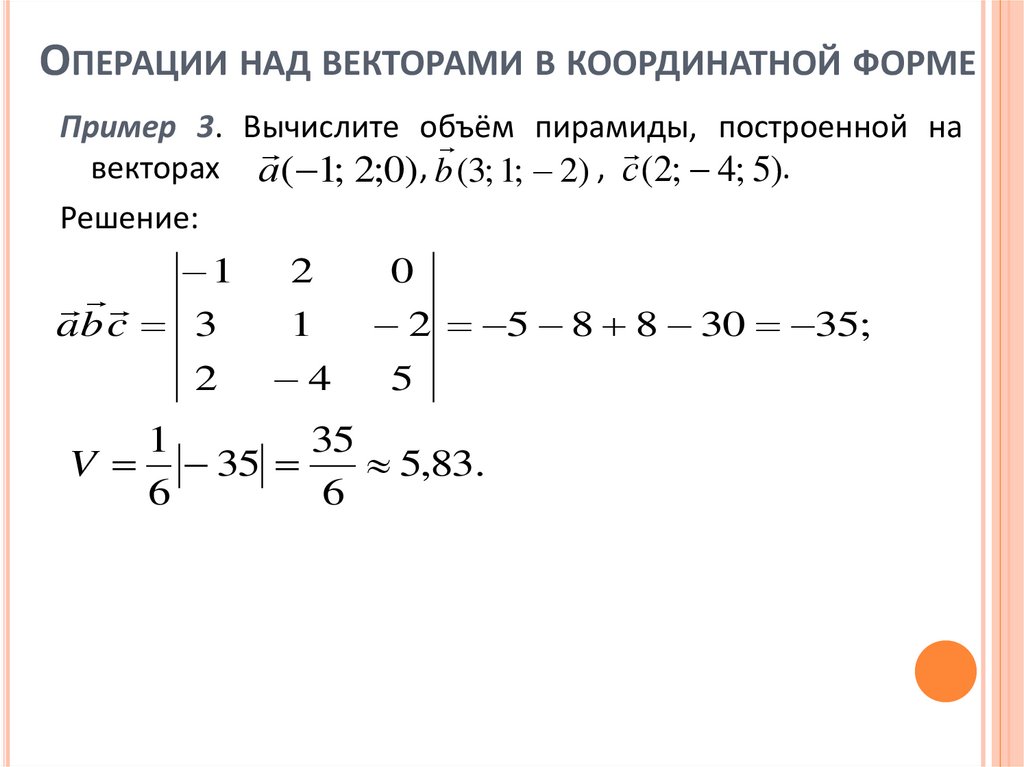
ОПЕРАЦИИ НАД ВЕКТОРАМИ В КООРДИНАТНОЙ ФОРМЕПример 3. Вычислите объём
пирамиды, построенной на
векторах а ( 1; 2;0) , b (3; 1; 2) , с (2; 4; 5).
Решение:
1
ab c 3
2
2
1
4
0
2 5 8 8 30 35;
5
1
35
V 35
5,83.
6
6
53.
ПРЯМАЯ И ЕЁ УРАВНЕНИЯЛинии на плоскости соответствует некоторое уравнение с
двумя переменными х и у F ( x, y) 0 , которому
удовлетворяют координаты любой точки, лежащей на
линии, и не удовлетворяют координаты ни одной точки, не
лежащие на ней. Такое уравнение называется уравнением
данной линии.
Всякая прямая в декартовой система координат может быт
представлена уравнением первой степени и, наоборот,
всякое уравнение первой степени относительно х и у
определяет прямую линию.
54.
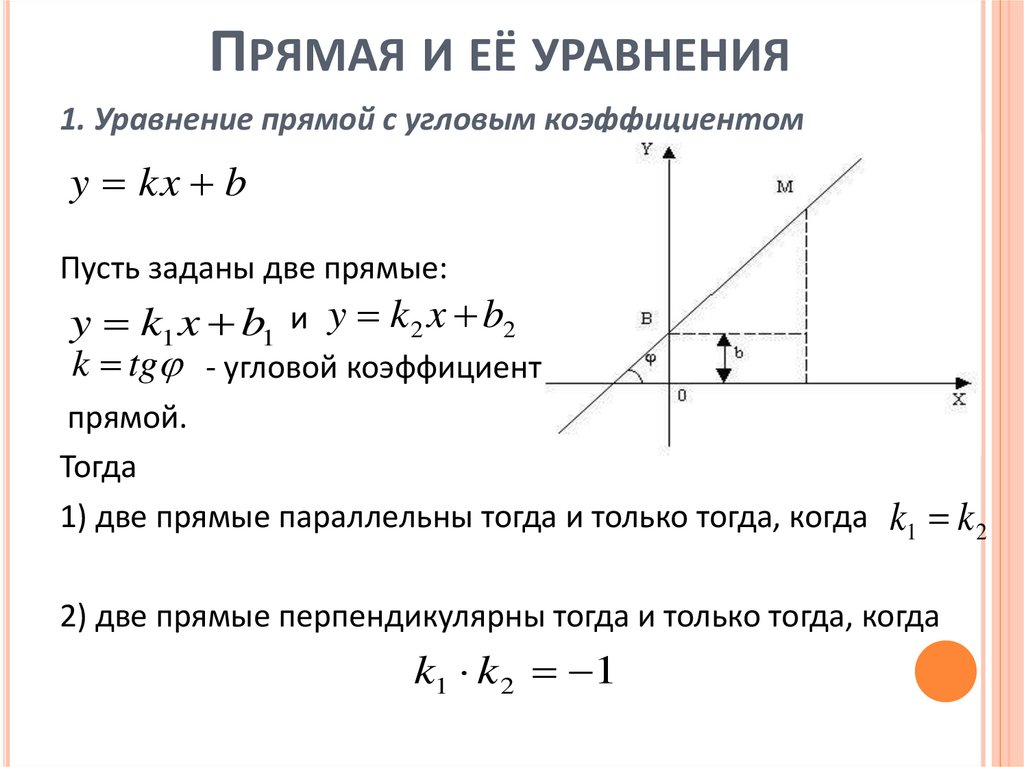
ПРЯМАЯ И ЕЁ УРАВНЕНИЯ1. Уравнение прямой с угловым коэффициентом
y kx b
Пусть заданы две прямые:
y k1 x b1 и y k 2 x b2
k tg - угловой коэффициент
прямой.
Тогда
1) две прямые параллельны тогда и только тогда, когда k1 k 2
2) две прямые перпендикулярны тогда и только тогда, когда
k1 k 2 1
55.
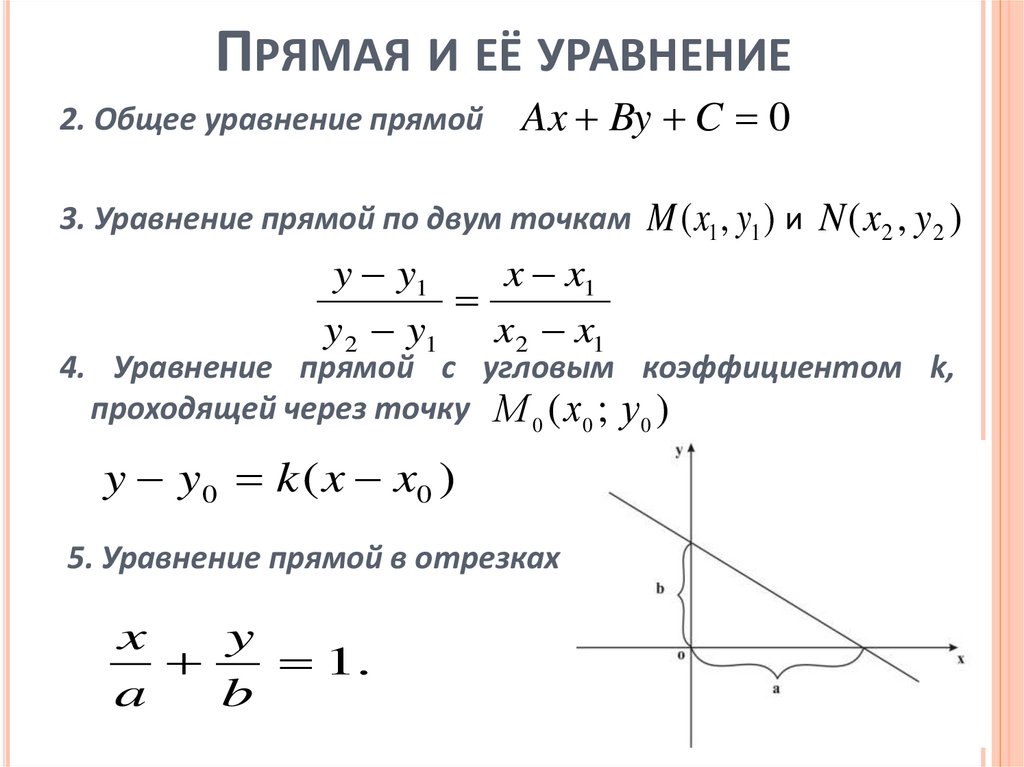
ПРЯМАЯ И ЕЁ УРАВНЕНИЕ2. Общее уравнение прямой
Ax By C 0
3. Уравнение прямой по двум точкам M ( x1 , y1 ) и N ( x2 , y 2 )
y y1
x x1
y 2 y1 x2 x1
4. Уравнение прямой с угловым коэффициентом k,
проходящей через точку М 0 ( х0 ; у 0 )
y y 0 k ( x x0 )
5. Уравнение прямой в отрезках
x
y
1.
a
b
56.
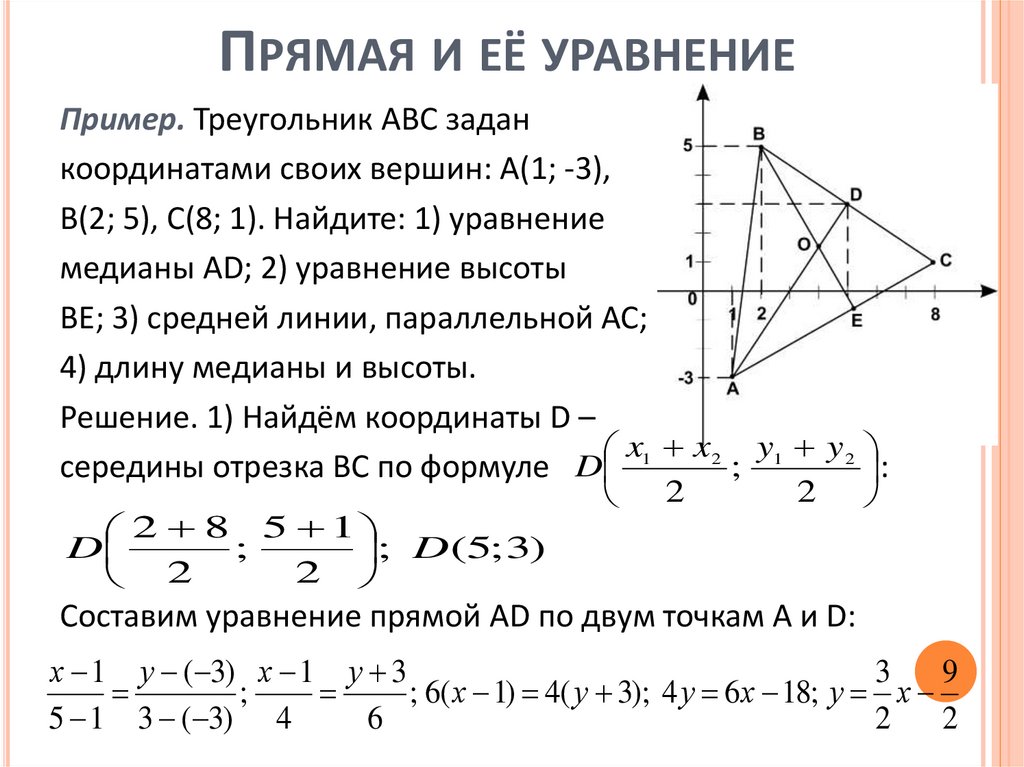
ПРЯМАЯ И ЕЁ УРАВНЕНИЕПример. Треугольник АВС задан
координатами своих вершин: А(1; -3),
В(2; 5), С(8; 1). Найдите: 1) уравнение
медианы AD; 2) уравнение высоты
ВЕ; 3) средней линии, параллельной АС;
4) длину медианы и высоты.
Решение. 1) Найдём координаты D –
x x2 y1 y 2
;
середины отрезка ВС по формуле D 1
:
2 8 5 1
D
;
; D(5; 3)
2
2
2
2
Составим уравнение прямой AD по двум точкам А и D:
х 1 у ( 3) х 1 у 3
3
9
;
; 6( х 1) 4( у 3); 4 у 6 х 18; у х
5 1 3 ( 3) 4
6
2
2
57.
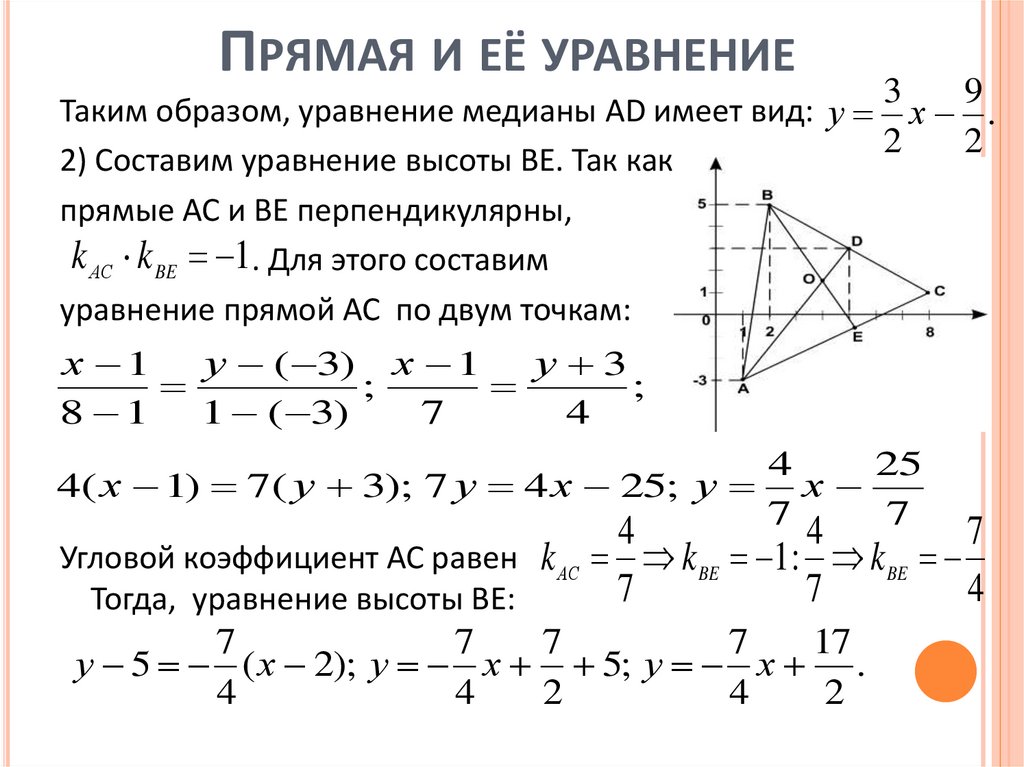
ПРЯМАЯ И ЕЁ УРАВНЕНИЕ3
9
Таким образом, уравнение медианы AD имеет вид: у х .
2
2
2) Составим уравнение высоты ВЕ. Так как
прямые АС и ВЕ перпендикулярны,
k АС k BE 1. Для этого составим
уравнение прямой АС по двум точкам:
х 1
у ( 3) х 1
у 3
;
;
8 1
1 ( 3)
7
4
4
25
4( х 1) 7( у 3); 7 у 4 х 25; у х
7
7
4
4
7
Угловой коэффициент АС равен k АС k BE 1 : k BE
7
7
4
Тогда, уравнение высоты ВЕ:
7
7
7
7
17
у 5 ( х 2); у х 5; у х .
4
4
2
4
2
58.
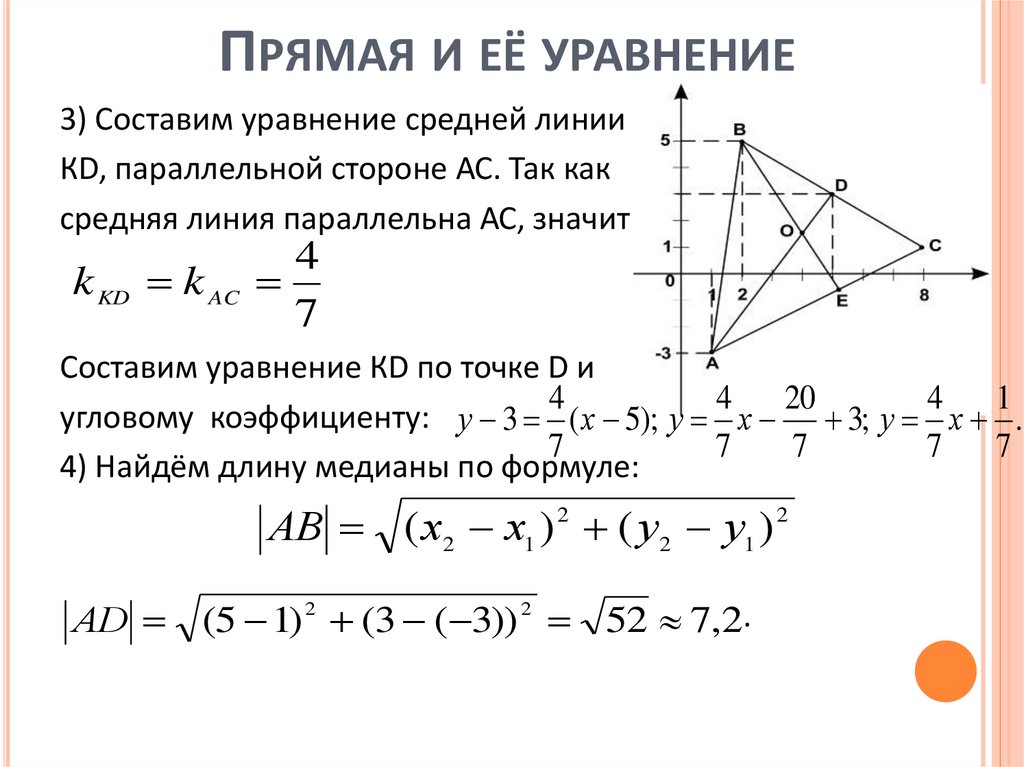
ПРЯМАЯ И ЕЁ УРАВНЕНИЕ3) Составим уравнение средней линии
КD, параллельной стороне АС. Так как
средняя линия параллельна АС, значит
k KD k AC
4
7
Составим уравнение КD по точке D и
4
4
20
4
1
угловому коэффициенту: у 3 ( х 5); у х 3; у х .
7
7
7
7
7
4) Найдём длину медианы по формуле:
АВ ( х2 х1 ) 2 ( у2 у1 ) 2
АD (5 1) 2 (3 ( 3)) 2 52 7,2.
59.
ПРЯМАЯ И ЕЁ УРАВНЕНИЯЧтобы найти длину высоту, найдём координаты точки Е из
решения системы уравнений:
4
25
7
17
4
25
у х
х
х
;
7
7
7
7
4
2
;
4
7
17 25
у 7 х 17
х
х
;
4
2
7
4
2
7
65
169
х
;
28
14
338
х
5,2; у 0,6.
65
Тогда,
ВЕ (5,2 2) 2 ( 0,6 5) 2 41,6 6,5.
60.
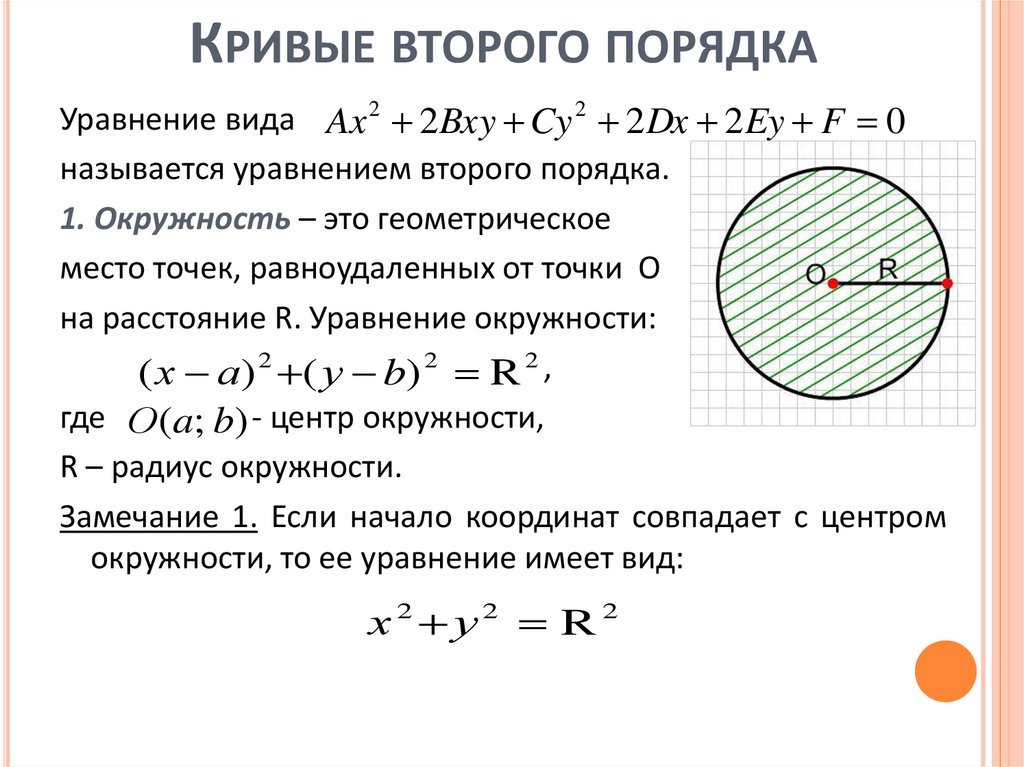
КРИВЫЕ ВТОРОГО ПОРЯДКАУравнение вида Ax 2 2Bxy Cy 2 2Dx 2Ey F 0
называется уравнением второго порядка.
1. Окружность – это геометрическое
место точек, равноудаленных от точки О
на расстояние R. Уравнение окружности:
( х а) 2 ( у b) 2 R 2 ,
где О(a; b) - центр окружности,
R – радиус окружности.
Замечание 1. Если начало координат совпадает с центром
окружности, то ее уравнение имеет вид:
х2 у2 R 2
61.
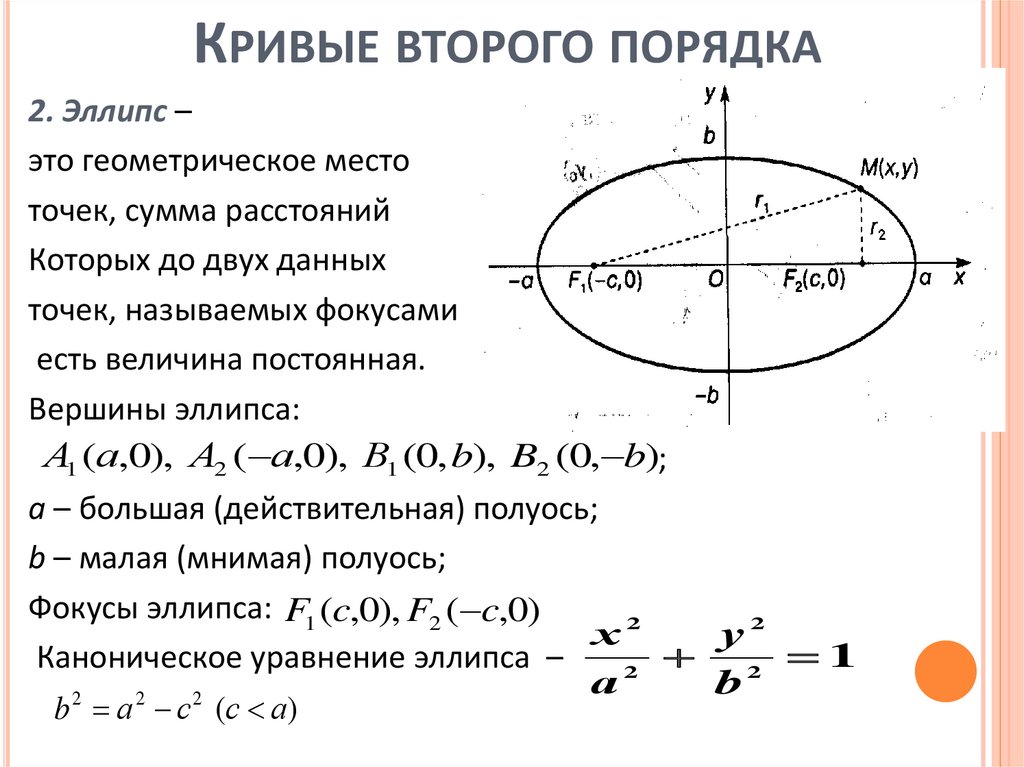
КРИВЫЕ ВТОРОГО ПОРЯДКА2. Эллипс –
это геометрическое место
точек, сумма расстояний
Которых до двух данных
точек, называемых фокусами
есть величина постоянная.
Вершины эллипса:
А1 (а,0), А2 ( а,0), В1 (0, b), B2 (0, b);
а – большая (действительная) полуось;
b – малая (мнимая) полуось;
Фокусы эллипса: F1 (c,0), F2 ( c,0)
х2
у2
1
Каноническое уравнение эллипса –
2
2
а
b
2
2
2
b а с (с а)
62.
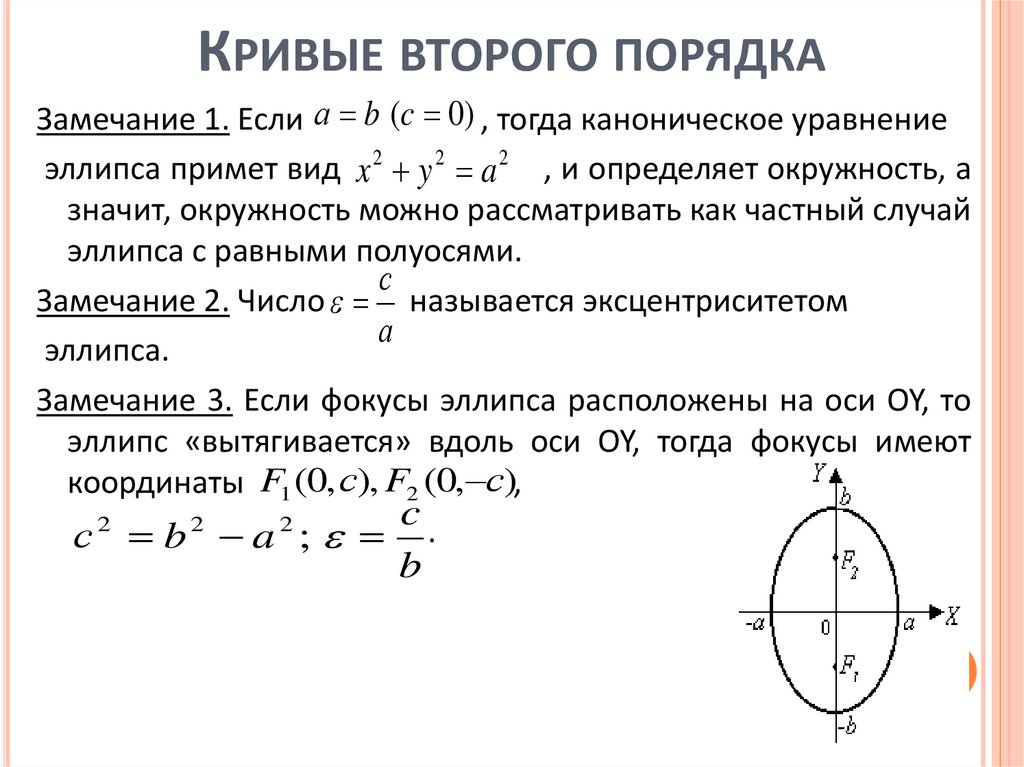
КРИВЫЕ ВТОРОГО ПОРЯДКАЗамечание 1. Если а b (c 0) , тогда каноническое уравнение
эллипса примет вид x 2 y 2 a 2 , и определяет окружность, а
значит, окружность можно рассматривать как частный случай
эллипса с равными полуосями.
с
Замечание 2. Число называется эксцентриситетом
а
эллипса.
Замечание 3. Если фокусы эллипса расположены на оси OY, то
эллипс «вытягивается» вдоль оси OY, тогда фокусы имеют
координаты F1 (0, с), F2 (0, с),
c.
2
2
2
с b a ;
b
63.
КРИВЫЕ ВТОРОГО ПОРЯДКА3. Гипербола –
Это геометрическое место
точек на плоскости,
разность расстояний
которых до двух данных
точек, называемых
фокусами, есть величина
постоянная.
х2
у2
2 1,
Каноническое уравнение гиперболы
2
а
b
2
2
2
b с а (с а) .
b
b
y
x
y
x;
Асимптоты гиперболы – это прямые
и
a
a
Вершины гиперболы А1 (а,0), А2 ( а,0) ,
Фокусы гиперболы F1 (c,0), F2 ( c,0).
64.
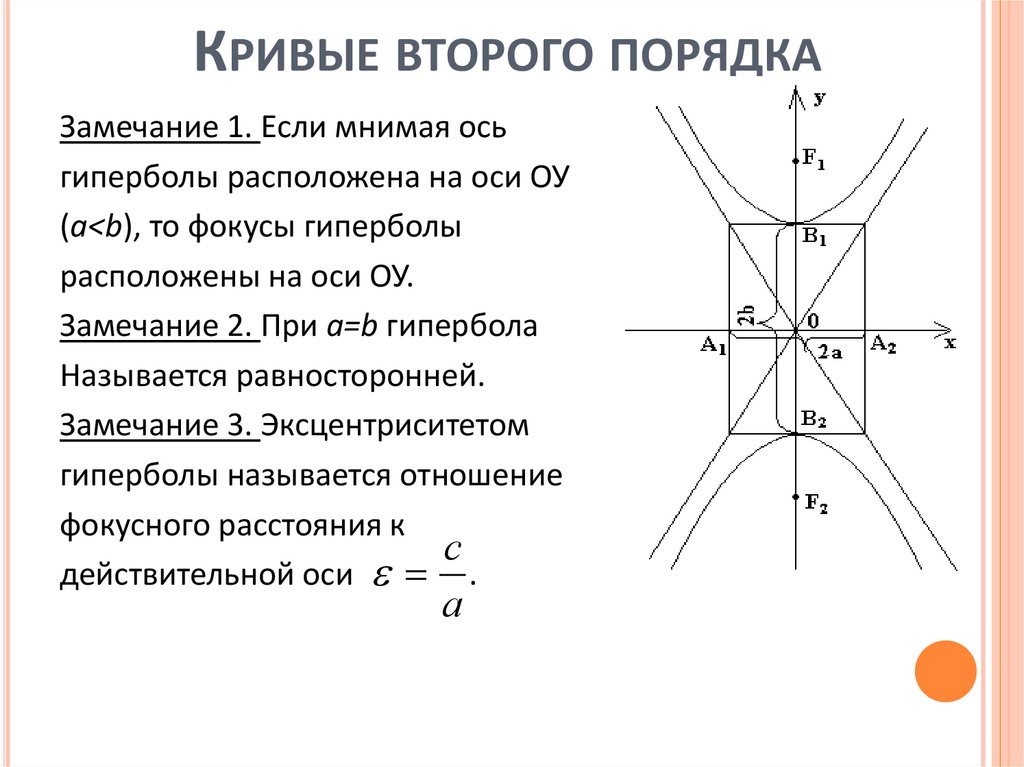
КРИВЫЕ ВТОРОГО ПОРЯДКАЗамечание 1. Если мнимая ось
гиперболы расположена на оси ОУ
(a<b), то фокусы гиперболы
расположены на оси ОУ.
Замечание 2. При a=b гипербола
Называется равносторонней.
Замечание 3. Эксцентриситетом
гиперболы называется отношение
фокусного расстояния к
с
действительной оси .
а
65.
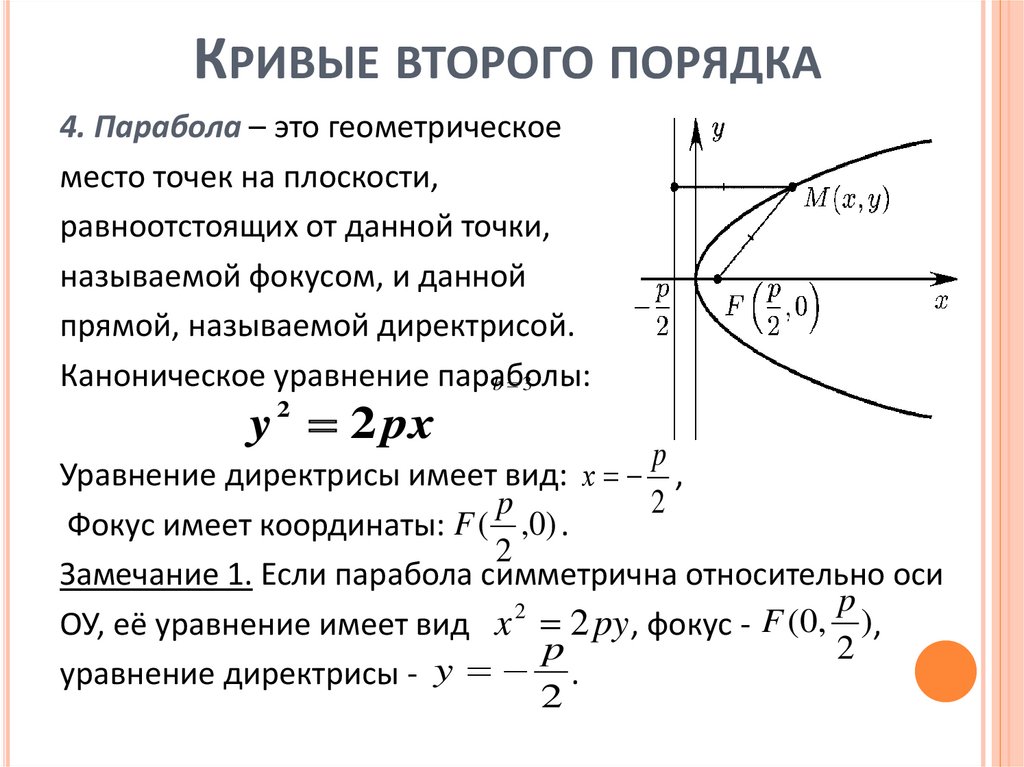
КРИВЫЕ ВТОРОГО ПОРЯДКА4. Парабола – это геометрическое
место точек на плоскости,
равноотстоящих от данной точки,
называемой фокусом, и данной
прямой, называемой директрисой.
Каноническое уравнение параболы:
b 3
y 2 2 px
p
Уравнение директрисы имеет вид: х ,
2
p
Фокус имеет координаты: F ( ,0) .
2
Замечание 1. Если парабола симметрична относительно оси
p
2
ОУ, её уравнение имеет вид x 2 py , фокус - F (0, ),
2
p
уравнение директрисы - y .
2
66.
КРИВЫЕ ВТОРОГО ПОРЯДКАПример. Определить вид кривой заданной уравнением
9 х 2 25 у 2 36 х 150 у 414 0 .
Найти координаты центра, вершин, фокусов. Сделать рисунок.
Решение. Группируем слагаемые с переменной х и
2
2
переменной у, получим: (9 х 36 х) ( 25 у 150 у) 414 0 .
Из скобок вынесем коэффициенты перед квадратами за скобки:
9( х 2 4 х) 25( у 2 6 у) 414 0 .
В каждой скобке выделим полный квадрат по формуле:
а 2 2ab b 2 (a b) 2 . То есть в первой скобке b 2 ,
в скобке прибавим b 2 4, и столько же вычтем.
2
Во второй скобке b 3 , прибавим b 9 , и столько же вычтем.
67.
КРИВЫЕ ВТОРОГО ПОРЯДКАПолучим:
9 ( х 2) 4 25 ( у 3)
9 ( х 2 4 х 4) 4 25 ( у 2 6 у 9) 9 414 0;
2
2
9 414 0;
9( х 2) 2 36 25( у 3) 2 225 414 0;
9( х 2) 2 25( у 3) 2 225
9( х 2) 2 25( у 3) 2
1;
225
225
( х 2) 2 ( у 3) 2
1;
9
25
( х 2) 2 ( у 3) 2
1.
2
2
3
5
: 225
68.
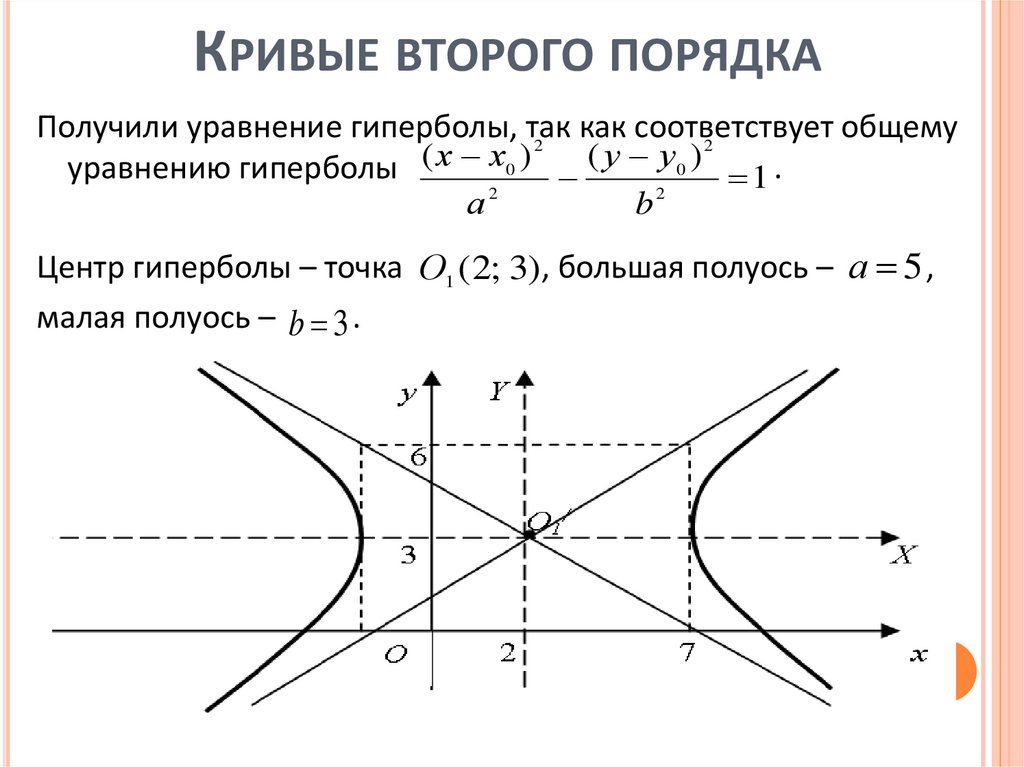
КРИВЫЕ ВТОРОГО ПОРЯДКАПолучили уравнение гиперболы, так
как соответствует
общему
2
2
уравнению гиперболы ( х х0 ) ( у у0 ) 1 .
а2
b2
Центр гиперболы – точка О1 ( 2; 3), большая полуось – а 5 ,
малая полуось – b 3 .
69.
КРИВЫЕ ВТОРОГО ПОРЯДКАВершины гиперболы: А1 (7; 3) и А2 ( 3; 3) (точки пересечения
гиперболы с пунктирной ось ОХ). Найдем координаты
фокусов. Для этого воспользуемся условием: b 2 с 2 а 2 (с а)
c 2 a 2 b 2 , c 2 5 2 32 25 9 34, c 34
Тогда, фокусы имеют координаты: F1 (2 34 ; 3) и F2 (2 34 ; 3).
70.
АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ В ПРОСТРАНСТВЕУравнение плоскости
Пусть в пространстве R 3 введена прямоугольная система
координат OXYZ. Рассмотрим в пространстве некоторую
плоскость Q. Поверхности Q соответствует некоторое
уравнение F ( x, y, z ) 0 .
Данному уравнению удовлетворяют координаты x, y, z каждой
точки, лежащей на поверхности Q, и не удовлетворяют
координаты никакой точки, не лежащей на ней.
Уравнение F ( x, y, z ) 0 называется уравнением поверхности Q.
1. Общее уравнение плоскости Ах Вy Cz D 0 , где
A 2 B 2 C 2 0.
71.
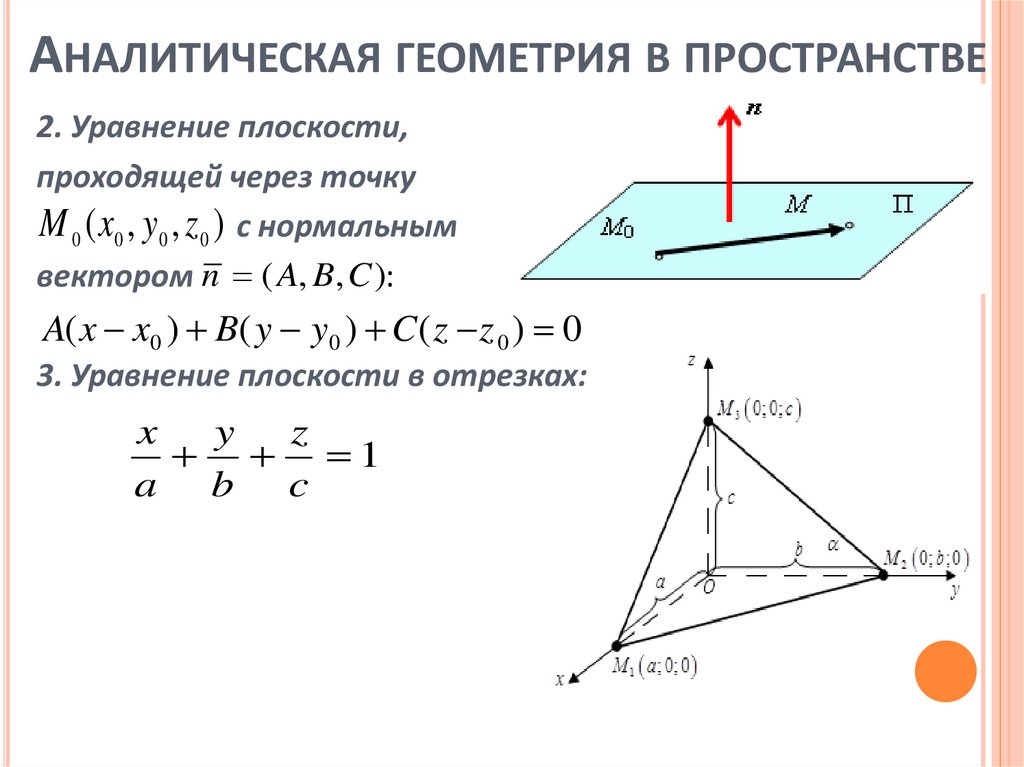
АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ В ПРОСТРАНСТВЕ2. Уравнение плоскости,
проходящей через точку
M 0 ( x0 , y0 , z 0 ) с нормальным
вектором n ( A, B, C ):
A( x x0 ) B( y y0 ) C ( z z 0 ) 0
3. Уравнение плоскости в отрезках:
x
y z
1
a b c
72.
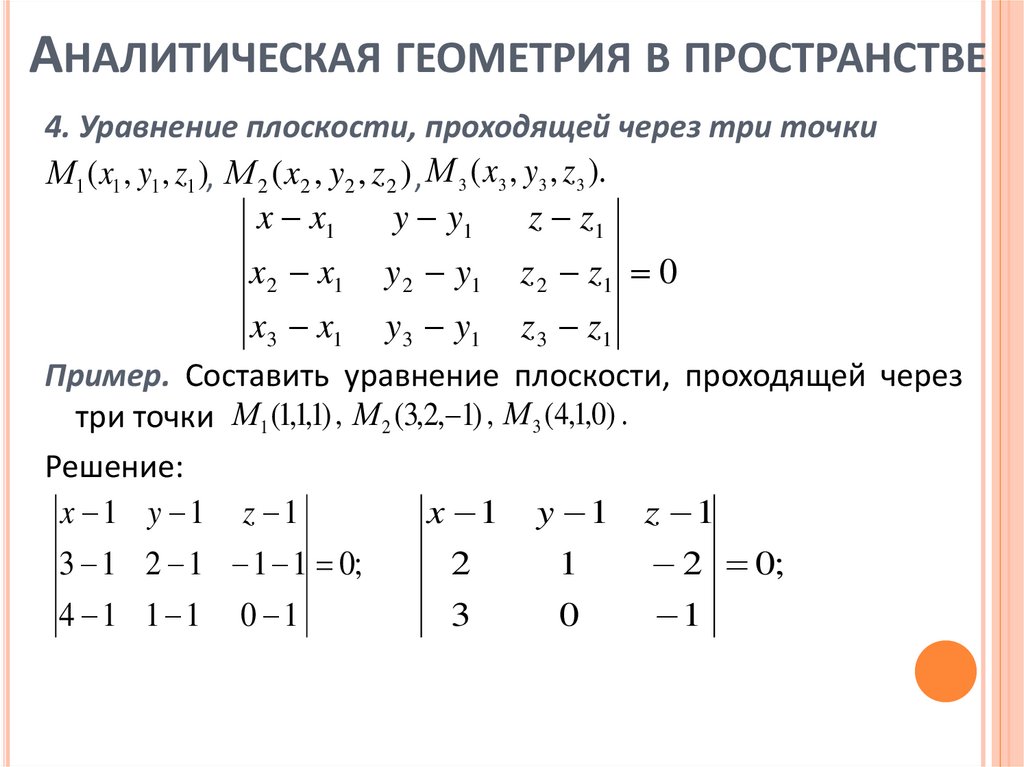
АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ В ПРОСТРАНСТВЕ4. Уравнение плоскости, проходящей через три точки
М 1 ( x1 , y1 , z1 ), М 2 ( x2 , y2 , z 2 ) , М 3 ( x3 , y3 , z3 ).
x x1
y y1
z z1
x 2 x1
y 2 y1
z 2 z1 0
x3 x1
y 3 y1
z 3 z1
Пример. Составить уравнение плоскости, проходящей через
три точки М 1 (1,1,1) , М 2 (3,2, 1) , М 3 (4,1,0) .
Решение:
x 1 y 1 z 1
x 1 y 1 z 1
3 1 2 1 1 1 0;
2
1
2 0;
4 1 1 1 0 1
3
0
1
73.
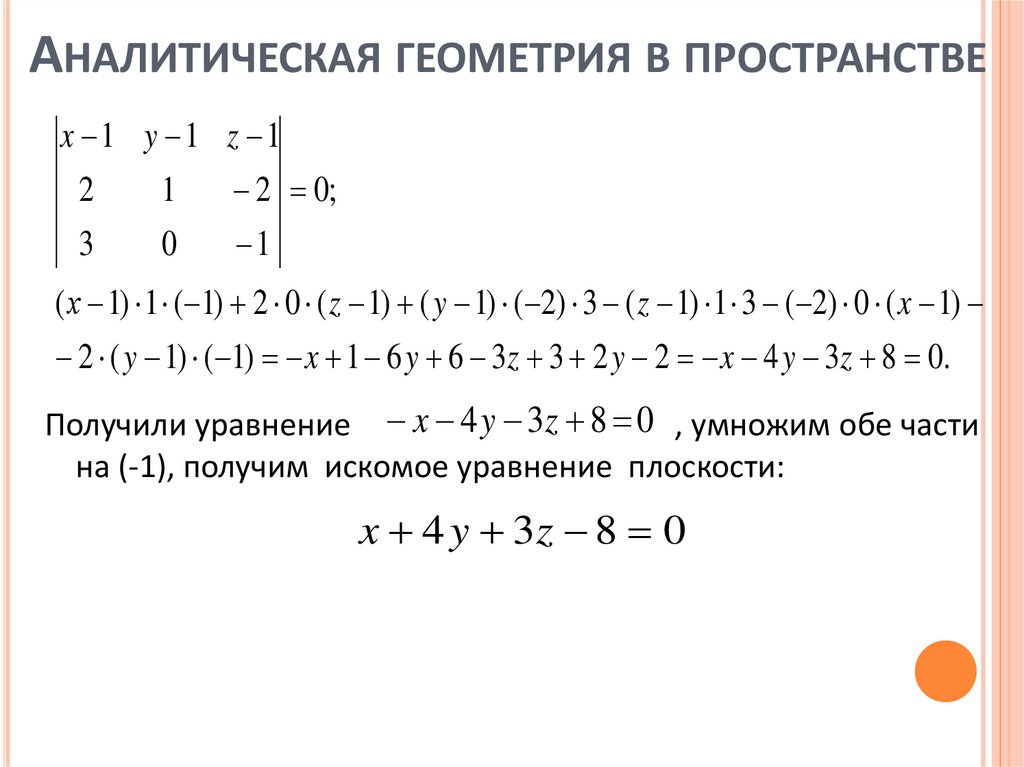
АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ В ПРОСТРАНСТВЕx 1 y 1 z 1
2
1
2 0;
3
0
1
( х 1) 1 ( 1) 2 0 ( z 1) ( y 1) ( 2) 3 ( z 1) 1 3 ( 2) 0 ( x 1)
2 ( y 1) ( 1) x 1 6 y 6 3z 3 2 y 2 x 4 y 3z 8 0.
Получили уравнение x 4 y 3z 8 0 , умножим обе части
на (-1), получим искомое уравнение плоскости:
x 4 y 3z 8 0
74.
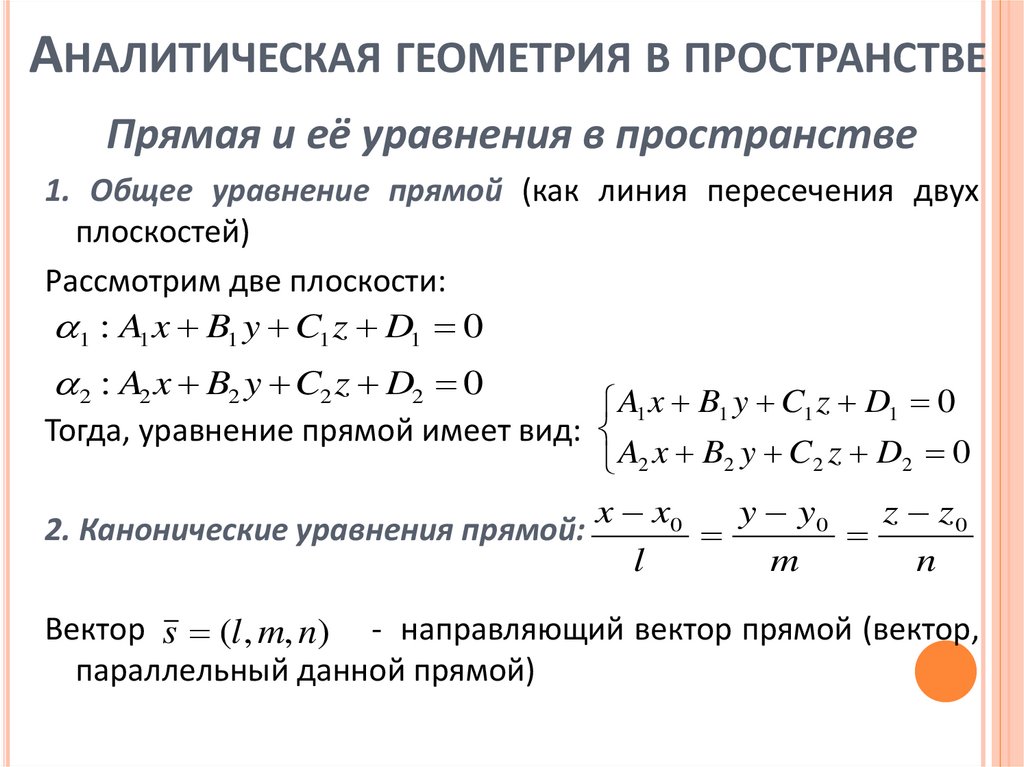
АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ В ПРОСТРАНСТВЕПрямая и её уравнения в пространстве
1. Общее уравнение прямой (как линия пересечения двух
плоскостей)
Рассмотрим две плоскости:
1 : A1 x B1 y C1 z D1 0
2 : A2 x B2 y C2 z D2 0
A1 x B1 y C1 z D1 0
Тогда, уравнение прямой имеет вид:
A2 x B2 y C2 z D2 0
2. Канонические уравнения прямой:
x x0
y y0
z z0
l
m
n
Вектор s (l , m, n) - направляющий вектор прямой (вектор,
параллельный данной прямой)
75.
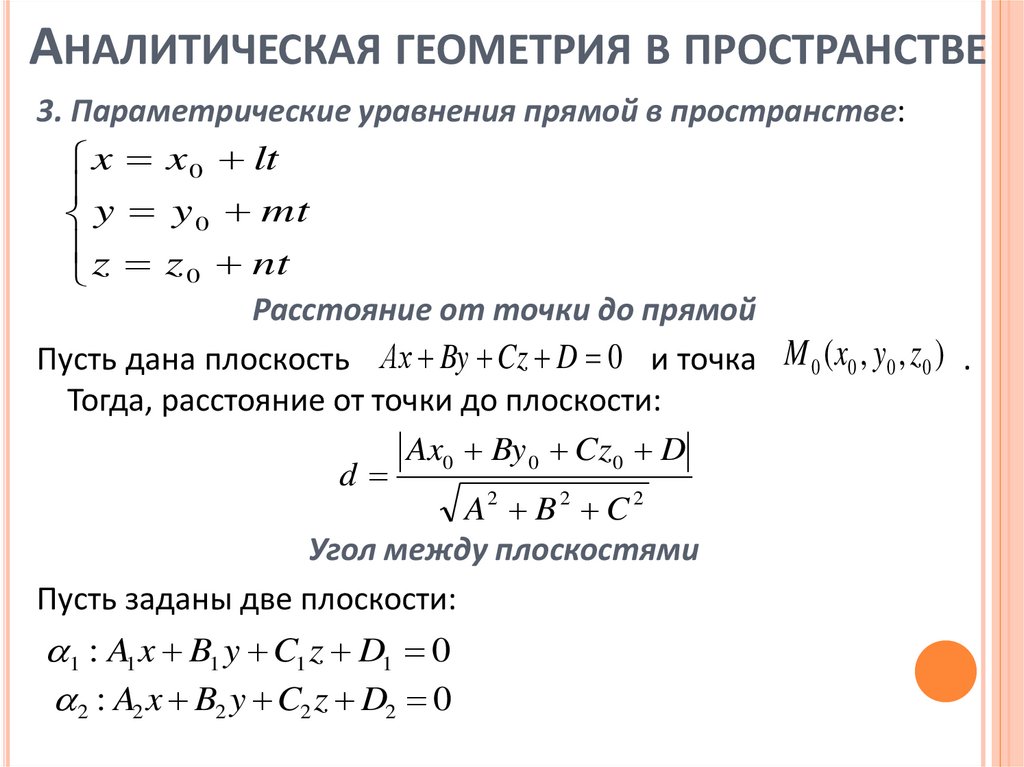
АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ В ПРОСТРАНСТВЕ3. Параметрические уравнения прямой в пространстве:
x x 0 lt
y y 0 mt
z z nt
0
Расстояние от точки до прямой
Пусть дана плоскость Аx By Cz D 0 и точка M 0 ( x0 , y0 , z 0 ) .
Тогда, расстояние от точки до плоскости:
Ax0 By 0 Cz0 D
d
A2 B 2 C 2
Угол между плоскостями
Пусть заданы две плоскости:
1 : A1 x B1 y C1 z D1 0
2 : A2 x B2 y C2 z D2 0
76.
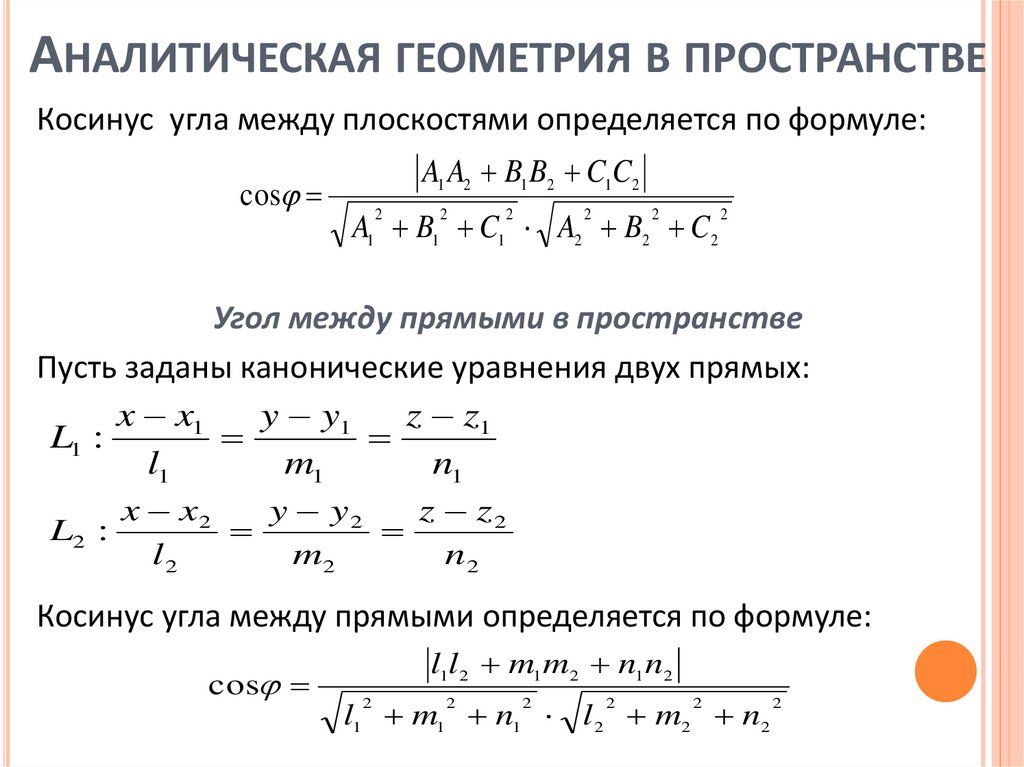
АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ В ПРОСТРАНСТВЕКосинус угла между плоскостями определяется по формуле:
cos
A1 A2 B1 B2 C1C2
A1 B1 C1 A2 B2 C2
2
2
2
2
2
2
Угол между прямыми в пространстве
Пусть заданы канонические уравнения двух прямых:
x x1
y y1
z z1
L1 :
l1
m1
n1
L2 :
x x2
y y2
z z2
l2
m2
n2
Косинус угла между прямыми определяется по формуле:
cos
l1l 2 m1m2 n1n2
l1 m1 n1 l 2 m2 n2
2
2
2
2
2
2
77.
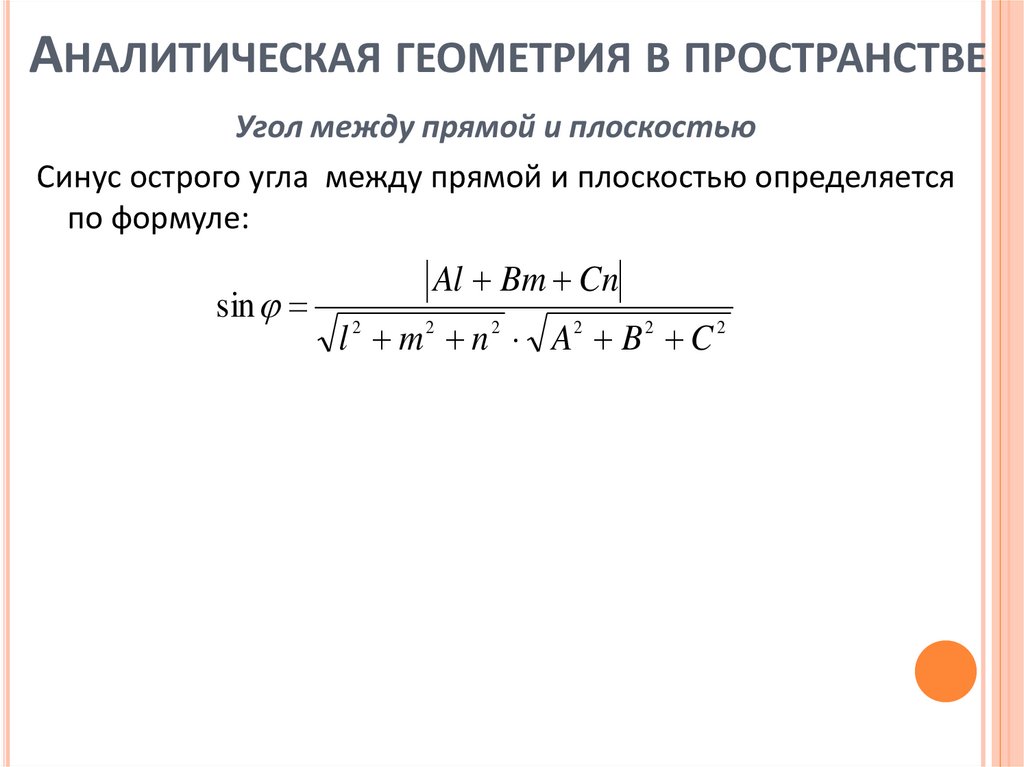
АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ В ПРОСТРАНСТВЕУгол между прямой и плоскостью
Синус острого угла между прямой и плоскостью определяется
по формуле:
sin
Al Bm Cn
l 2 m 2 n 2 A2 B 2 C 2
78.
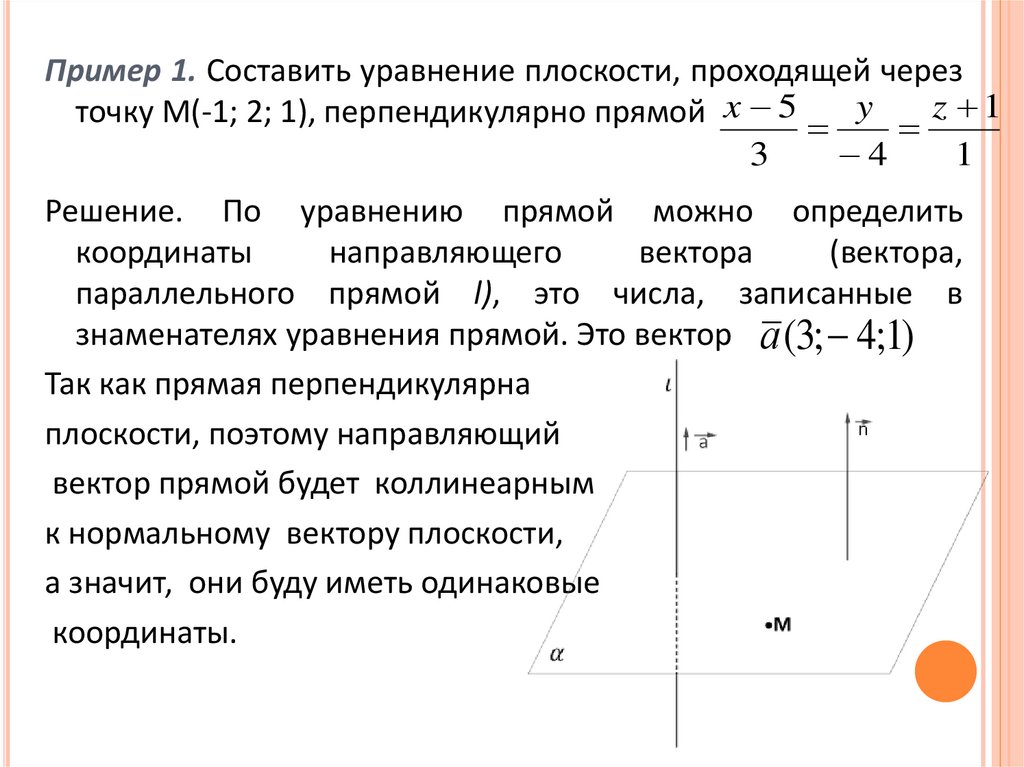
Пример 1. Составить уравнение плоскости, проходящей черезточку М(-1; 2; 1), перпендикулярно прямой x 5 y z 1
3
4
1
Решение. По уравнению прямой можно определить
координаты
направляющего
вектора
(вектора,
параллельного прямой l), это числа, записанные в
знаменателях уравнения прямой. Это вектор а (3; 4;1)
Так как прямая перпендикулярна
плоскости, поэтому направляющий
вектор прямой будет коллинеарным
к нормальному вектору плоскости,
а значит, они буду иметь одинаковые
координаты.
79.
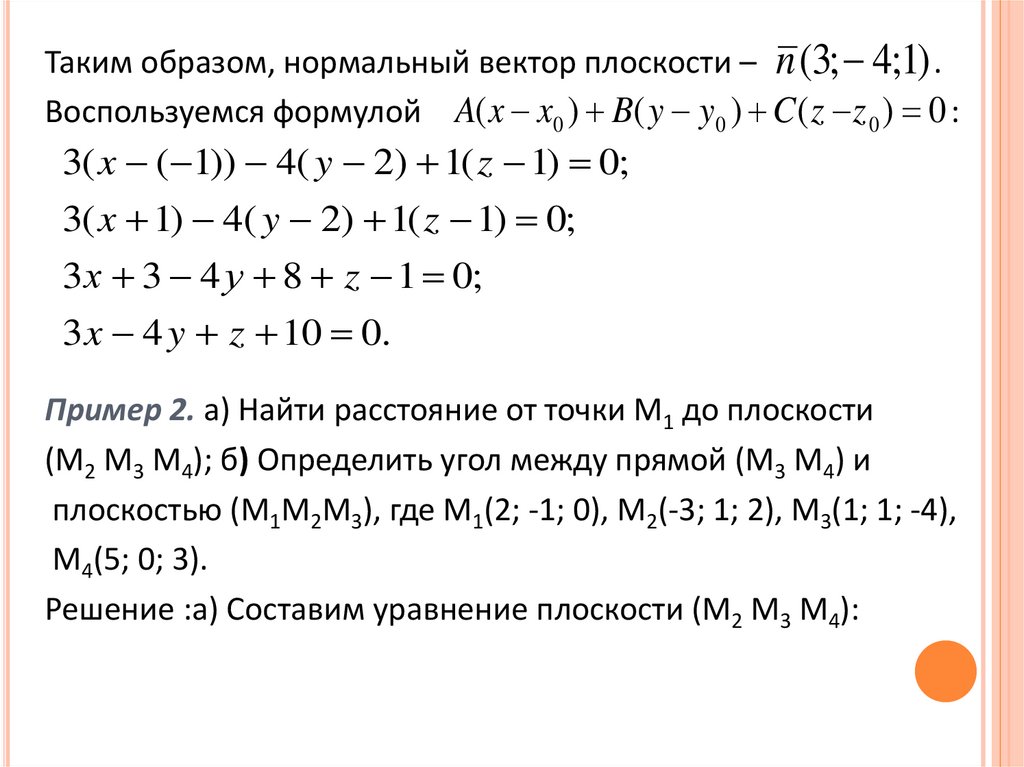
Таким образом, нормальный вектор плоскости – n (3; 4;1) .Воспользуемся формулой A( x x0 ) B( y y0 ) C ( z z 0 ) 0 :
3( x ( 1)) 4( y 2) 1( z 1) 0;
3( x 1) 4( y 2) 1( z 1) 0;
3х 3 4 у 8 z 1 0;
3x 4 y z 10 0.
Пример 2. а) Найти расстояние от точки М1 до плоскости
(М2 М3 М4); б) Определить угол между прямой (М3 М4) и
плоскостью (М1М2М3), где М1(2; -1; 0), М2(-3; 1; 2), М3(1; 1; -4),
М4(5; 0; 3).
Решение :а) Составим уравнение плоскости (М2 М3 М4):
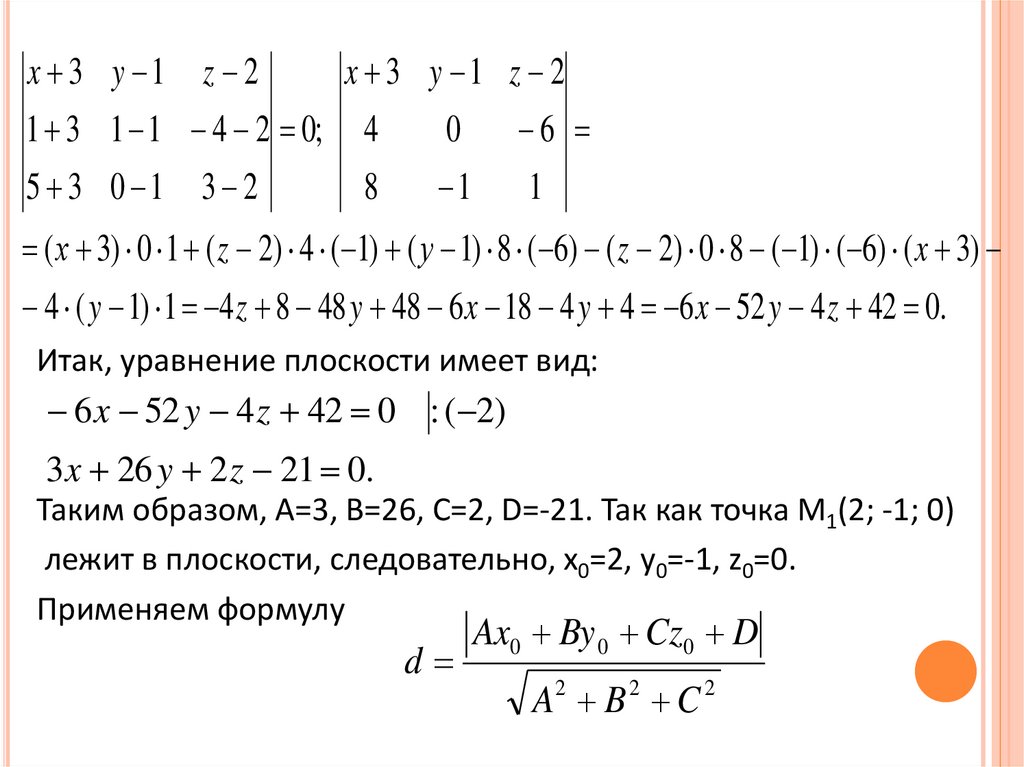
80.
x 3 y 1 z 2x 3 y 1 z 2
1 3 1 1 4 2 0;
4
0
6
5 3 0 1 3 2
8
1
1
( х 3) 0 1 ( z 2) 4 ( 1) ( у 1) 8 ( 6) ( z 2) 0 8 ( 1) ( 6) ( x 3)
4 ( y 1) 1 4 z 8 48 y 48 6 x 18 4 y 4 6 x 52 y 4 z 42 0.
Итак, уравнение плоскости имеет вид:
6 x 52 y 4 z 42 0 : ( 2)
3x 26 y 2 z 21 0.
Таким образом, А=3, В=26, С=2, D=-21. Так как точка М1(2; -1; 0)
лежит в плоскости, следовательно, х0=2, у0=-1, z0=0.
Применяем формулу
d
Ax0 By 0 Cz0 D
A2 B 2 C 2
81.
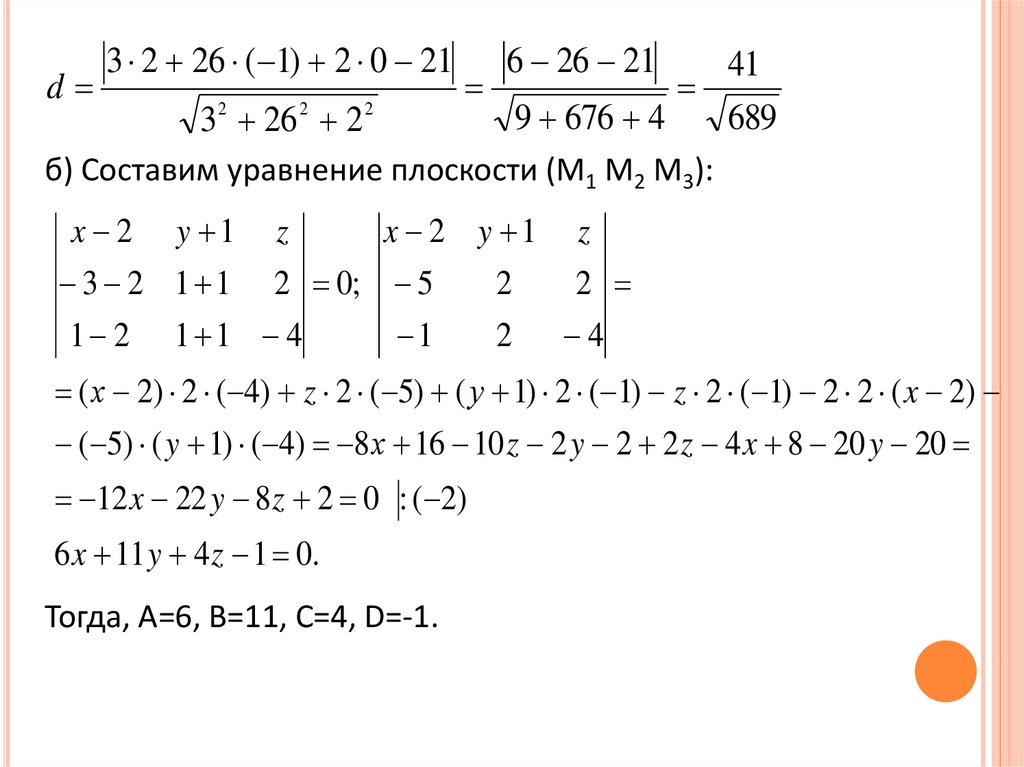
d3 2 26 ( 1) 2 0 21
32 26 2 2 2
6 26 21
41
9 676 4
689
б) Составим уравнение плоскости (М1 М2 М3):
x 2
y 1
3 2 1 1
1 2
z
x 2 y 1
2 0; 5
1 1 4
1
2
2
z
2
4
( х 2) 2 ( 4) z 2 ( 5) ( у 1) 2 ( 1) z 2 ( 1) 2 2 ( x 2)
( 5) ( y 1) ( 4) 8 х 16 10 z 2 y 2 2 z 4 x 8 20 y 20
12 x 22 y 8 z 2 0 : ( 2)
6 x 11 y 4 z 1 0.
Тогда, А=6, В=11, С=4, D=-1.
82.
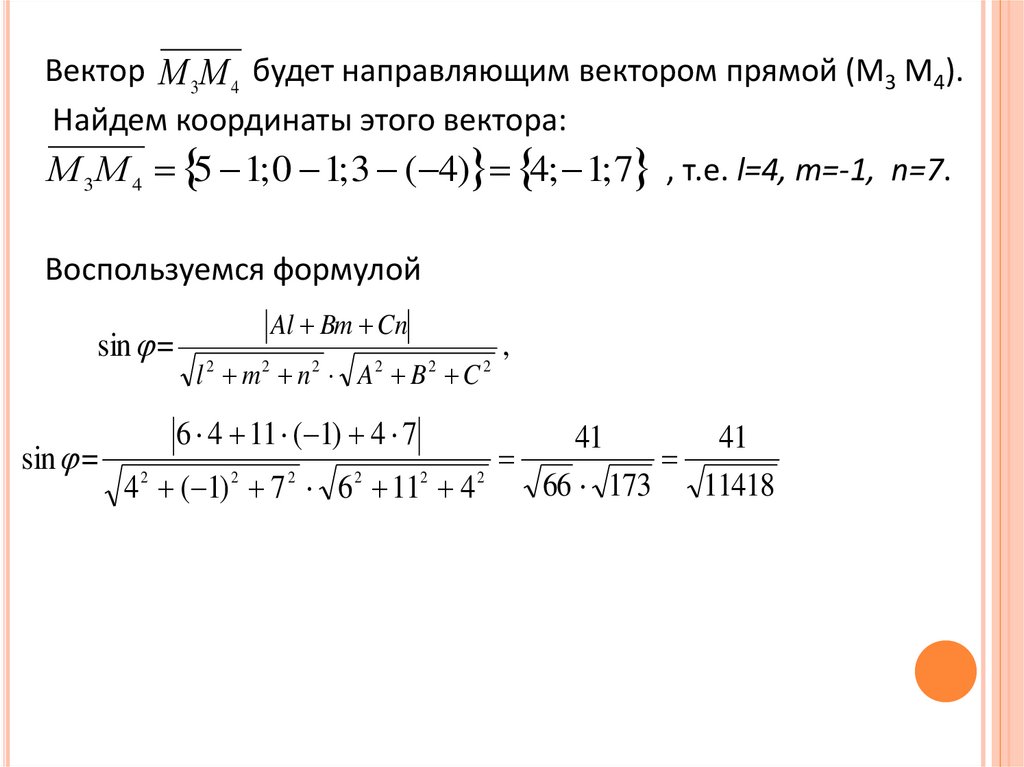
Вектор М 3 М 4 будет направляющим вектором прямой (М3 М4).Найдем координаты этого вектора:
М 3 М 4 5 1; 0 1; 3 ( 4) 4; 1; 7 , т.е. l=4, m=-1, n=7.
Воспользуемся формулой
sin =
Al Bm Cn
l m n A B C
2
2
2
2
6 4 11 ( 1) 4 7
2
2
,
41
41
sin = 2
2
2
2
2
2
66 173
11418
4 ( 1) 7 6 11 4
83.
ЛИНЕЙНЫЕ ПРОСТРАНСТВАМножество V называется линейным пространством, если
1) задано правило, по которому для каждых 2-х элементов
x, y V можно построить третий элемент z V называемый
суммой х и у и обозначаемый z=х+у;
2) задано правило, которое позволяет для каждого элемента
х V и для каждого числа построить элемент у V , у х
называемый произведением х на число ;
3) правила построения суммы и произведения элемента на
число удовлетворяющих следующим аксиомам:
1. x y x y, x, y V - коммутативный закон
2. ( x y) z x ( y z ), x, y, z V - ассоциативный закон
3. Существует 0 (нуль-вектор), такой элемент из V, что x 0 x, x V
84.
4. Для всякого х V существует элемент y V такой, чтоx у 0 - у называют противоположенным к х элементом
5. 1 х х, х V
6. ( x) ( ) x, x V
7. ( ) x x x
8. ( x y ) x y, x, y V
Примеры линейных пространств:
1.
Совокупность
действительных
(вещественных)
и
комплексных чисел с обычными операциями сложения и
умножения на действительные числа.
2. Множество свободных векторов в 2-х и 3-х мерном
пространстве.
3. Совокупность всех многочленов степени n.
85.
ЛИНЕЙНАЯ ЗАВИСИМОСТЬ ВЕКТОРОВПусть х1 , х2 ,..., хк вектора из линейного пространства V;
с1 , с2 ,..., ск - действительные числа.
Вектора х1 , х2 ,..., хк называются линейно зависимыми,
если существуют числа с1 , с2 ,..., ск не все равные нулю, но
такие, что выполняется равенство с1 х1 с2 х2 ... ск хк 0
Если равенство возможно только при с1 с2 ... ск 0 , то
х1 , х2 ,..., хк - линейно независимы.
Пример. Является ли линейно независимой система векторов:
f1 (1, 1,2,0), f 2 (0,0,1,1), f 3 (1,0,1,1) .
Решение. Составим равенство c1 f1 c2 f 2 c3 f 3 0
c1 (1, 1,2,0) c2 (0,0,1,1) c3 (1,0,1,1) 0
(c1 c3 ; c1 ; 2c1 c2 c3 ; c2 c3 ) 0
86.
ЛИНЕЙНАЯ ЗАВИСИМОСТЬ ВЕКТОРОВПолучим систему уравнений:
c1 c3 0
c 0
1
;
2c1 c 2 c3 0
c 2 c3 0
c1 0
c 0
2
c3 0
c 4 0
Таким образом, система векторов является линейно
независимой.
Конечная система векторов { f } f1 , f 2 ,..., f n называется
базисом линейного пространства V, если:
1) векторы f 1 , f 2 ,..., f n линейно независимы;
2) любой вектор пространства V представляется в виде
линейной комбинации векторов базиса:
y 1 f1 2 f 2 ... n f n
87.
СОБСТВЕННЫЕ ЧИСЛА И ВЕКТОРЫ МАТРИЦЫОпределение. Вектор х называется собственным вектором
матрицы А, если он обладает следующими свойствами:
1) x 0;
2) существует такое число , что Ax x.
При этом число называется собственным числом матрицы А.
Теорема. Для того, чтобы было собственным числом матрицы
А необходимо и достаточно, чтобы det( A E ) 0 .
Данное уравнение называется характеристическим уравнением.
Утверждение. Собственные векторы матрицы являются
решением уравнения
( А Е ) х 0
88.
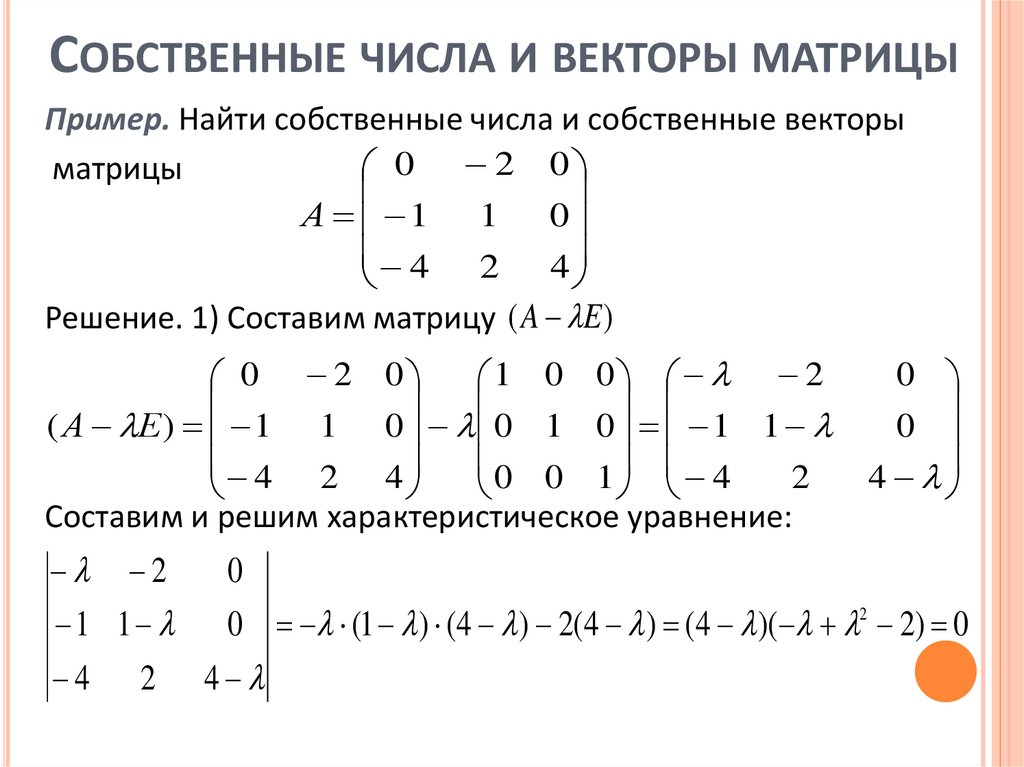
СОБСТВЕННЫЕ ЧИСЛА И ВЕКТОРЫ МАТРИЦЫПример. Найти собственные числа и собственные векторы
0 2 0
матрицы
А 1 1 0
4 2 4
Решение. 1) Составим матрицу ( A E )
0 2 0
1 0 0 2
( А Е ) 1 1 0 0 1 0 1 1
4 2 4
0 0 1 4
2
Составим и решим характеристическое уравнение:
2
1 1
4
2
0
0
4
0
0 (1 ) (4 ) 2(4 ) (4 )( 2 2) 0
4
89.
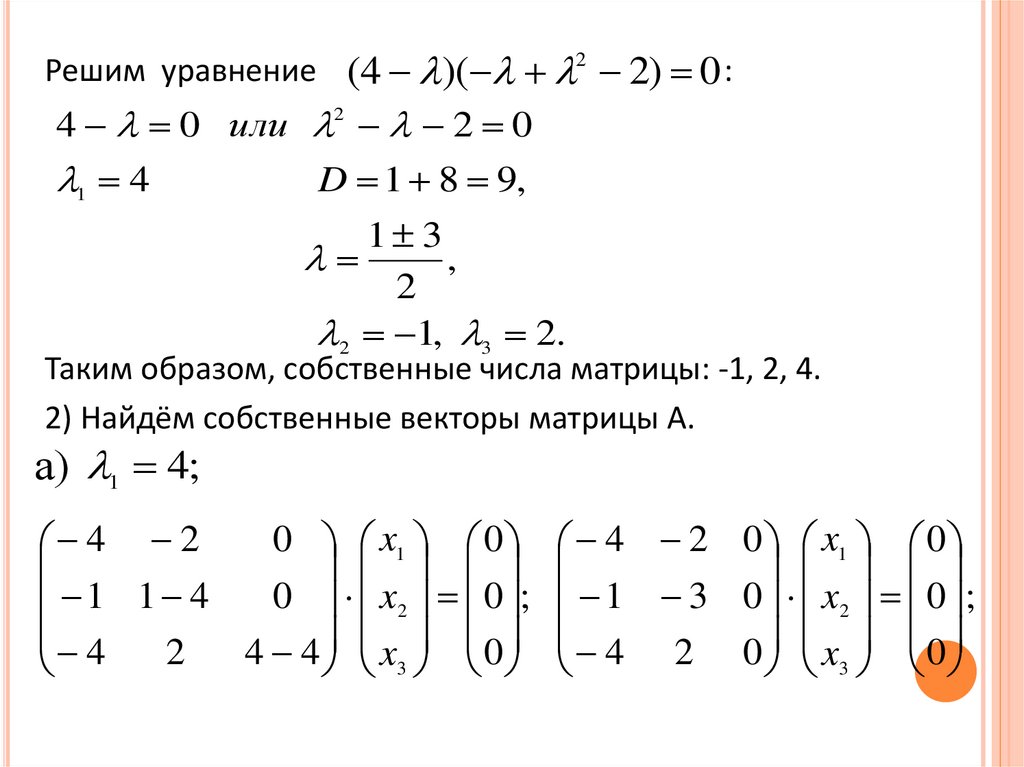
Решим уравнение (4 )( 2 2) 0 :4 0 или 2 2 0
1 4
D 1 8 9,
1 3
,
2
2 1, 3 2.
Таким образом, собственные числа матрицы: -1, 2, 4.
2) Найдём собственные векторы матрицы А.
а) 1 4;
0 x1 0
4 2
0 x2 0 ;
1 1 4
4
x 0
2
4
4
3
4 2 0 x1 0
1 3 0 x2 0 ;
4 2 0 x 0
3
90.
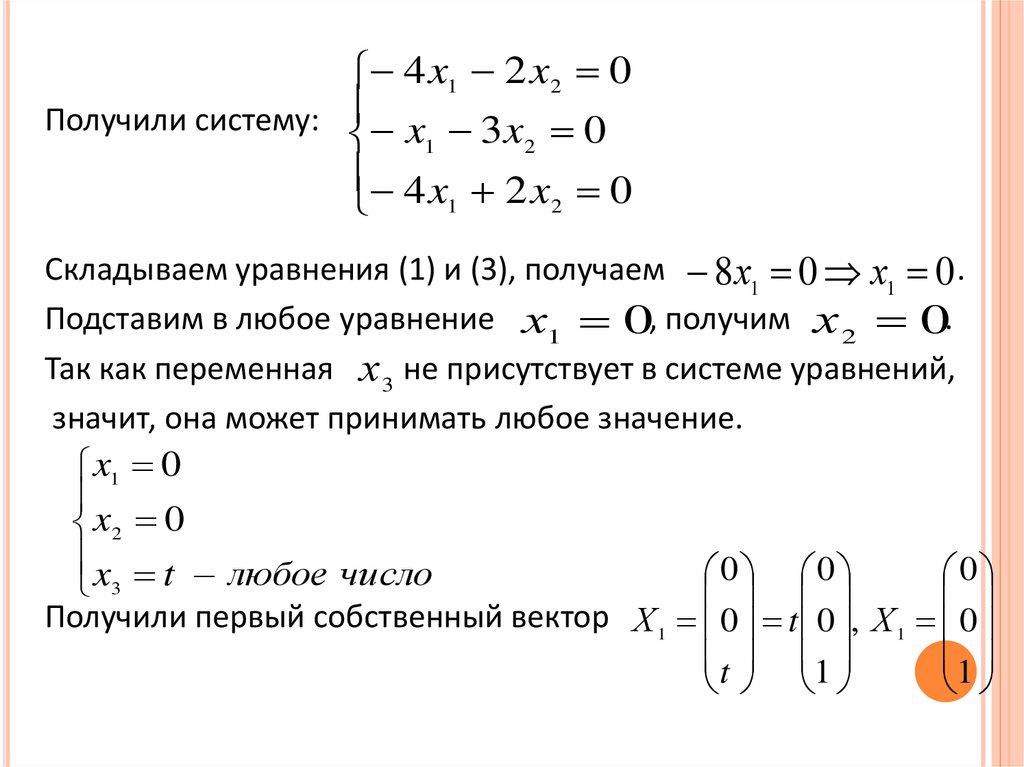
4 x1 2 x2 0Получили систему: x 3 x 0
1
2
4 x 2 x 0
1
2
Складываем уравнения (1) и (3), получаем 8 х1 0 х1 0 .
Подставим в любое уравнение х1 0, получим х 2 0.
Так как переменная х 3 не присутствует в системе уравнений,
значит, она может принимать любое значение.
x1 0
x2 0
x t любое число
0 0
0
3
Получили первый собственный вектор Х 1 0 t 0 , Х 1 0
t 1
1
91.
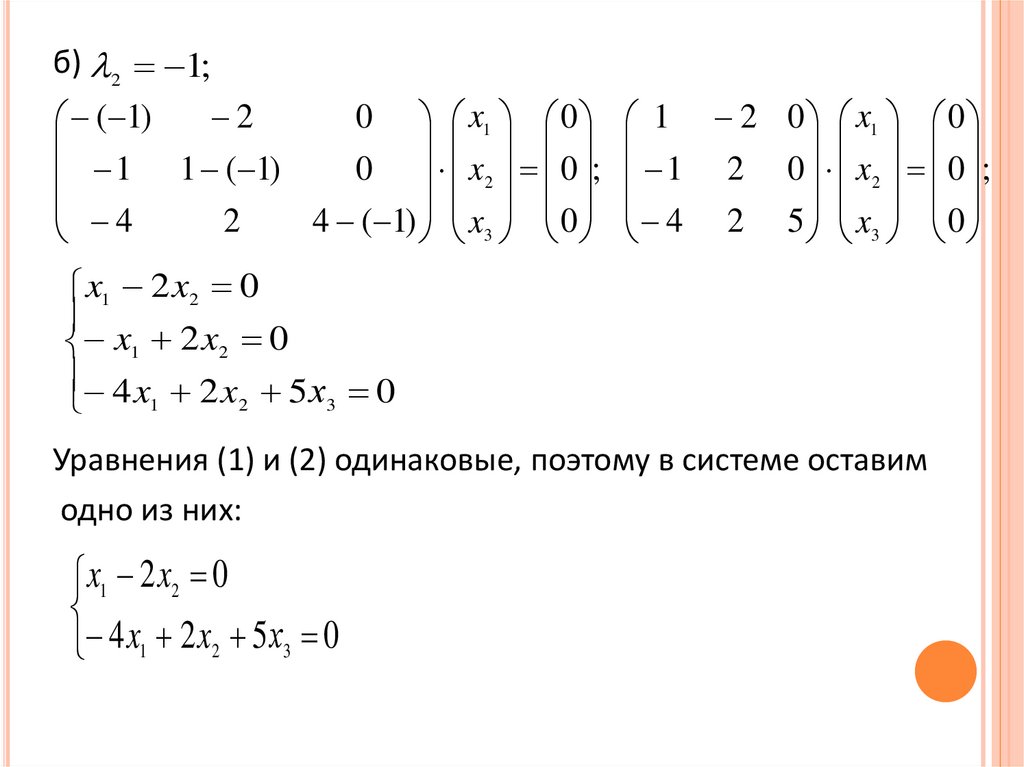
б) 2 1;2
0 x1 0
( 1)
0 x2 0 ;
1 1 ( 1)
4
x 0
2
4
(
1
)
3
1 2 0 x1 0
1 2 0 x2 0 ;
4 2 5 x 0
3
x1 2 x2 0
x1 2 x2 0
4 x 2 x 5 х 0
1
2
3
Уравнения (1) и (2) одинаковые, поэтому в системе оставим
одно из них:
x1 2 x2 0
4 x1 2 x2 5 х3 0
92.
Из первого уравнения выразимуравнение:
x1 2 x2
;
4 2 x 2 2 x 2 5 х 3 0
х1 ,
и подставим во второе
x1 2 x2
;
6 x 2 5 х 3 0
Получаем систему:
x1 2 x2
;
x3 1,2 x2
x t любое число
2
x1 2t
x3 1,2t
x t любое число
2
Получили второй собственный вектор
2t
2
2
Х 2 t t 1 , Х 2 1
1,2t
1,2
1,2
x1 2 x2
.
х3 1,2 x2
93.
в)2 2;
2 2
1 1 2
4
2
0 x1 0
0 x2 0 ;
4 2 x3 0
2 x1 2 x2 0 : (2)
;
x1 x2 0
4 x 2 x 2 х 0
1
2
3
2
1
4
2
1
2
0 x1 0
0 x2 0 ;
2 x3 0
x1 x2 0
x1 x2 0
x1 x2 0
4 x1 2 x2 2 х3 0
4 x 2 x 2 х 0
1
2
3
x1 x2
;
4 ( x 2 ) 2 x 2 2 х 3 0
x1 x2
;
6 x2 2 х3 0
x1 x2
.
х3 3x2
94.
Получаем систему:x1 x2
;
x3 3x2
x t любое число
2
x1 t
x3 3t
x t любое число
2
Получили третий собственный вектор
t 1
1
Х 3 t
t 1 , Х 3 1
3t 3
3
95.
Математический анализ96.
ФУНКЦИЯФункция – это зависимость между двумя переменными, это
правило, по которому для каждого значения переменной
х можно найти единственное значение переменной у.
Обозначение: y f (x)
х – независимая переменная, аргумент;
у – зависимая переменная, функция.
Все значения независимой переменной х образуют область
определения функции, которая обозначается D(y).
Все значения функции у образуют область значений
функции, которая обозначается Е(у).
х 1
y
Пример. Найти область определения
.
2
D( y) : 4 x 2 0 x 2 4 x 2 2 x 2
D( y) ( 2; 2)
4 х
97.
ФУНКЦИЯСпособы задания функции
1. Табличный способ.
2. Аналитический (с помощью формулы).
3. Графический (с помощью графика).
Виды функций
1. Элементарная функция – это функция, аргументом
которой является переменная х.
2. Сложная функция – это функция, аргументом которой
является другая функция (функция от функции)
Примеры: y=sinx, y=lnx – элементарные функции;
y=cos(2x+4) – сложная функция.
98.
ФУНКЦИЯКлассы функций
1. Линейная функция – y kx b, график – прямая линия
k
2. Обратная пропорциональность – y , гипербола
x
3. Функция квадратный корень – y x
4. Функция y x 3 , график – кубическая парабола
2
5. Квадратичная функция y ax bx c , парабола
x
6. Показательная функция – y a
7. Логарифмическая функция – y log a x
8. Тригонометрические функции – y sin x , y cos x,
y tgx, y ctgx
9. Обратные тригонометрические функции – y arcsin x,
y arccos x, y arctgx , y arcctgx .
99.
ФУНКЦИИОсновные свойства функции
1. Нули функции – это значение аргумента, при котором
значение функции равно нулю.
2. Промежутки знакопостоянства - множества значений
аргумента, на которых значения функции только
положительны или только отрицательны.
3. Монотонность функции (возрастание и убывание
функции).
4. Чётность (нечётность) функции.
5. Ограниченность функции.
6. Периодичность функции.
100.
ПРЕДЕЛ ПОСЛЕДОВАТЕЛЬНОСТИЧисло А называется пределом числовой последовательности
a n , если все её члены неограниченно приближаются к этому
числу при стремлении n к бесконечности ( n ).
Обозначение:
lim a n A
n
Свойства пределов
{a n bn } lim a n lim bn
1. lim
n
n
n
{a n bn } lim a n lim bn
2. lim
n
n
n
lim {a n bn } lim a n lim bn
3. n
n
lim a n
an
n
lim
4. n b
lim bn
n
n
n
101.
ПРЕДЕЛ ФУНКЦИИРаскрытие неопределённостей
Иногда правила предельного перехода непосредственно
0
неприменимы, так как возникают ситуации ,
,
,
0
Такие ситуации получили название – неопределённость.
Примеры:
1
x2 1 0
( x 1)( x 1)
x 1
2
lim
lim 2
1. lim
2
x 1 x 3 1
x
1
x
1
( x 1)( x x 1)
x x 1 3
0
x 4 2 0
( x 4 2)( x 4 2)
x 4 4
2. lim
=
lim
lim
x 0
x 0
x
x( x 4 2)
x( x 4 2)
0 x 0
x
1
1
lim
= lim
x 0
x( x 4 2) x 0 x 4 2 4
(домножение на сопряжённое)
102.
ПРЕДЕЛ ФУНКЦИИ3. lim
x 0
x
x( x 4 2)
lim
x 0
1
1
x 4 2 4
(Поделили числитель и знаменатель дроби на старшую
степень ).
1
1
1
1
4. lim (
3 ) lim (
)
2
x 1 x 1
x 1 x 1
x 1
( x 1)( x x 1)
x2 x 1 1
x2 x 2
lim 3
0.
= lim
3
x 1
x 1 x 1
x 1
103.
ПРЕДЕЛ ФУНКЦИИЗамечательные пределы
sin x
Первый замечательный предел lim
1,
x 0
x
1 x
Второй замечательный предел lim(1 ) e.
x
x
Примеры:
sin 5 x
5 sin 5 x
sin 5 x
lim
5 lim
5 1 5
5. lim
x 0
x 0
x 0
x
5x
5x
1
6. lim (1 ) x. Положим x y, при х , у
x
x
1 y
1
1
1
lim (1 ) lim
y
y
1 y
1 y e
y
(1 )
lim (1 )
y
y
y
104.
ПРЕДЕЛ ФУНКЦИИ2х 3
7. lim
х
2х 1
х 1
5х
2х 1 4
lim
х
2х 1
1
lim 1
х
2х 1
4
e
lim
2 х 1 4 х 1
4 2 х 1 5 х
4 x 4
х 10 x 2 5 x
e0 1
х 1
5х
4
1
lim 1
lim 1
х
х
2х 1
2х 1
4
4 х 1
1
lim 1
х
2х 1
4
х 1
5х
2 х 1
4
х 1
5х
2 х 1 5 х
e
4 х 1
х 2 х 1 5 х
lim
105.
ПРЕДЕЛ ФУНКЦИИСравнение бесконечно малых
Пусть и бесконечно малые (последовательности или
функции).
1) Если конечный и отличный от нуля предел существует
lim
C , C 0, C ,
то и являются бесконечно малыми (б.м.) одного и того
же порядка.
2) Если lim
, то имеет высший порядок малости по
0
отношению к (или
чем ).
- б.м. более высокого порядка,
106.
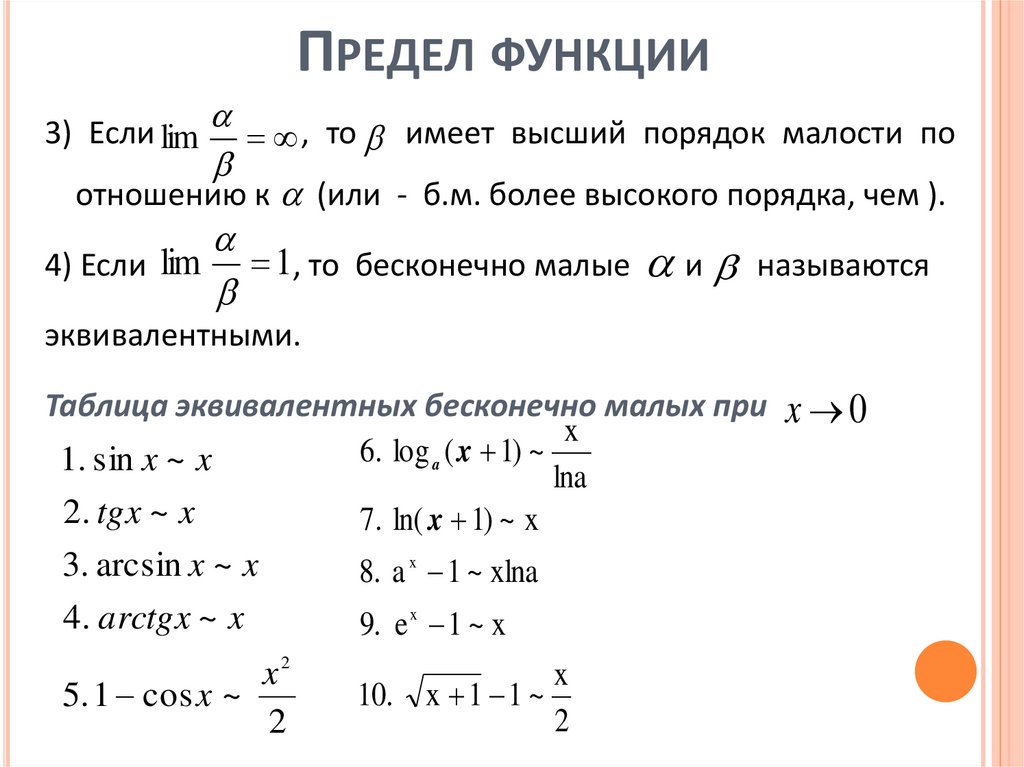
ПРЕДЕЛ ФУНКЦИИ, то имеет высший порядок малости по
отношению к (или - б.м. более высокого порядка, чем ).
3) Если lim
4) Если lim 1, то бесконечно малые и называются
эквивалентными.
Таблица эквивалентных бесконечно малых при
x
6. log a ( x 1) ~
1. sin x ~ x
lna
2. tgx ~ x
7. ln( x 1) ~ x
3. arcsin x ~ x
8. a x 1 ~ xlna
4. arctgx ~ x
9. e x 1 ~ x
x2
5. 1 cos x ~
2
10. x 1 1 ~
x
2
x 0
107.
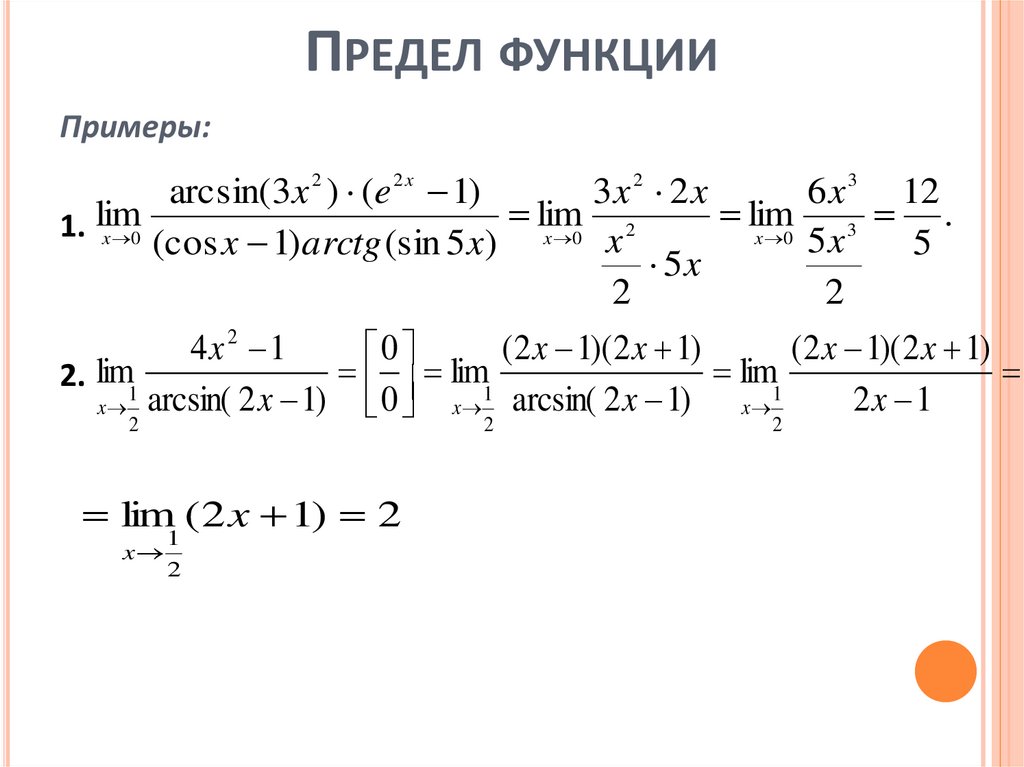
ПРЕДЕЛ ФУНКЦИИПримеры:
arcsin(3x 2 ) (e 2 x 1)
3x 2 2 x
6 x 3 12
lim 2
lim 3 .
1. lim
x 0
x 0 5 x
(cos x 1)arctg (sin 5 x) x 0 x
5
5x
2
2
4x 2 1
(2 x 1)( 2 x 1)
(2 x 1)( 2 x 1)
0
lim
lim
2. lim1
1
1
2x 1
x arcsin( 2 x 1)
0 x 2 arcsin( 2 x 1) x 2
2
lim ( 2 x 1) 2
x
1
2
108.
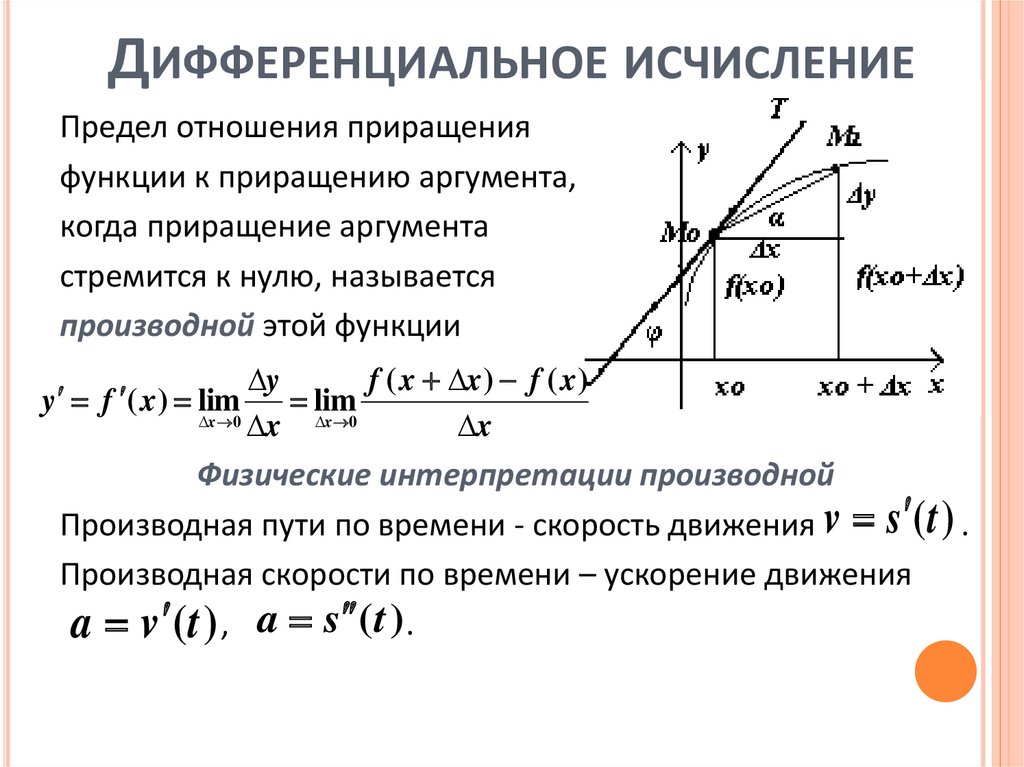
ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕПредел отношения приращения
функции к приращению аргумента,
когда приращение аргумента
стремится к нулю, называется
производной этой функции
y
f ( x x ) f ( x )
lim
x 0
x x 0
x
y f ( x ) lim
Физические интерпретации производной
Производная пути по времени - скорость движения v s (t ) .
Производная скорости по времени – ускорение движения
a v (t ) , a s (t ) .
109.
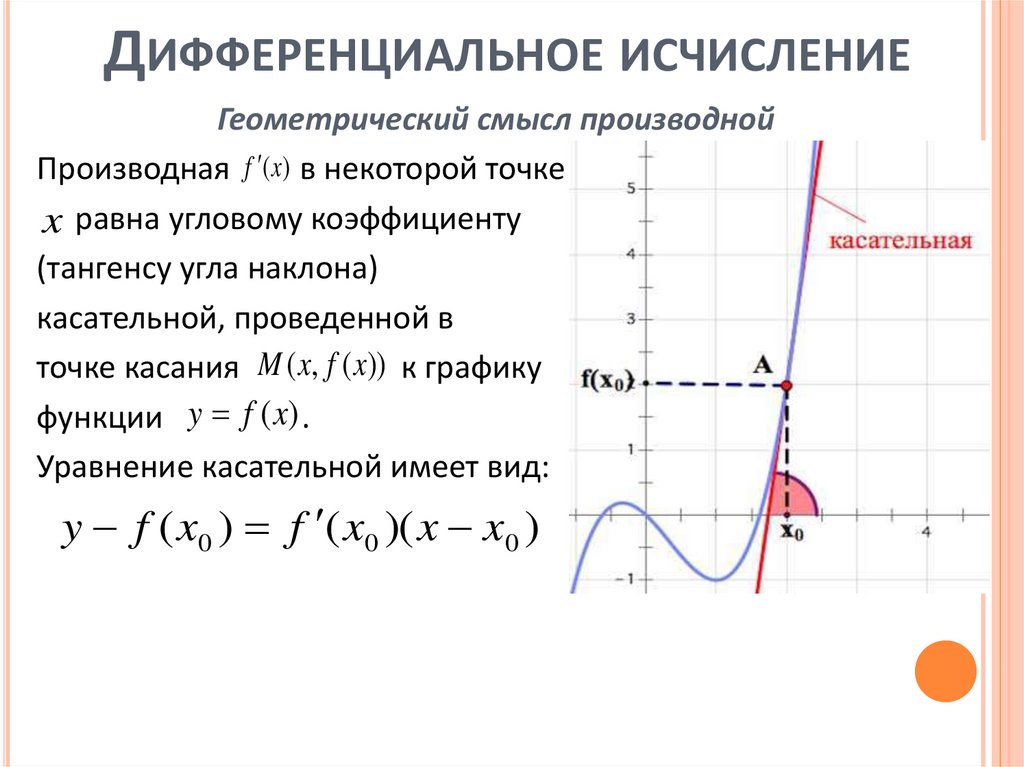
ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕГеометрический смысл производной
Производная f (x) в некоторой точке
x равна угловому коэффициенту
(тангенсу угла наклона)
касательной, проведенной в
точке касания M ( x, f ( x)) к графику
функции y f (x) .
Уравнение касательной имеет вид:
y f ( x0 ) f ( x0 )( x x0 )
110.
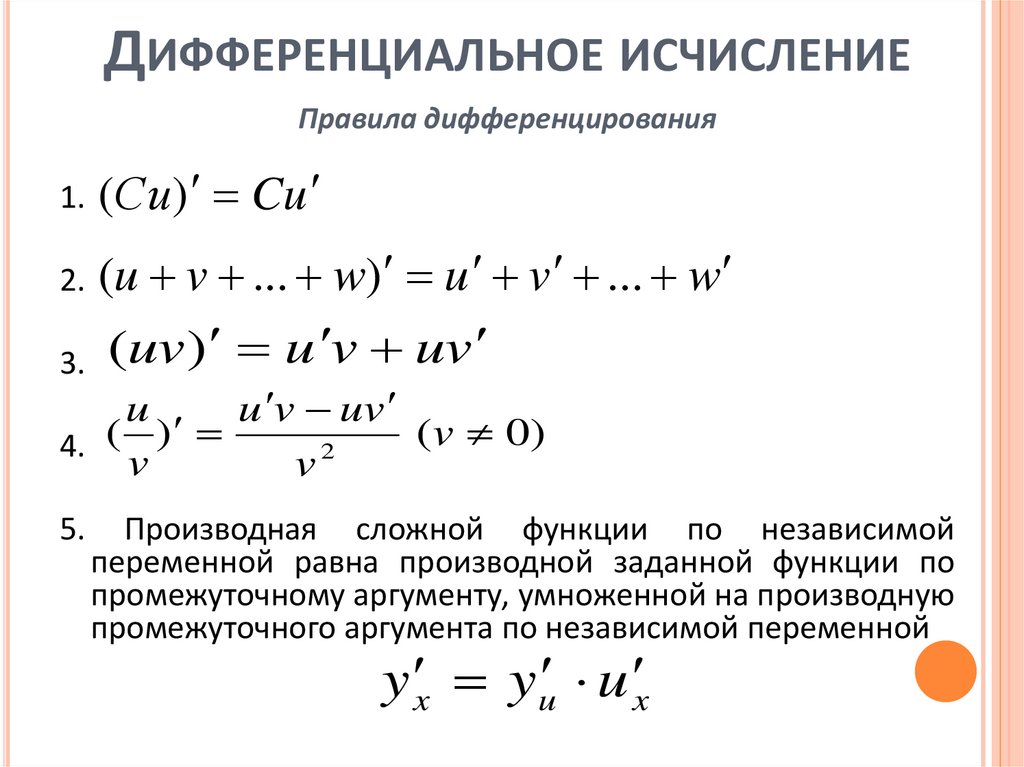
ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕПравила дифференцирования
1.
(Сu ) Cu
(u v ... w) u v ... w
3. (uv) u v uv
2.
u
u v uv
(v 0)
4. ( )
2
v
v
5.
Производная сложной функции по независимой
переменной равна производной заданной функции по
промежуточному аргументу, умноженной на производную
промежуточного аргумента по независимой переменной
y x yu u x
111.
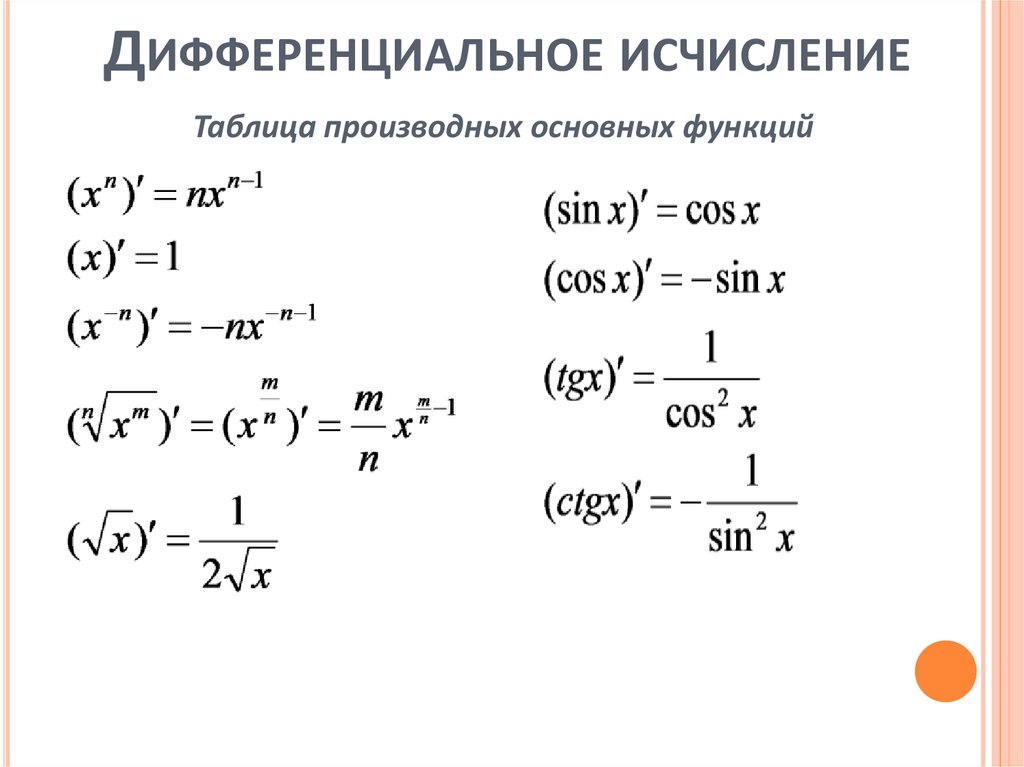
ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕТаблица производных основных функций
112.
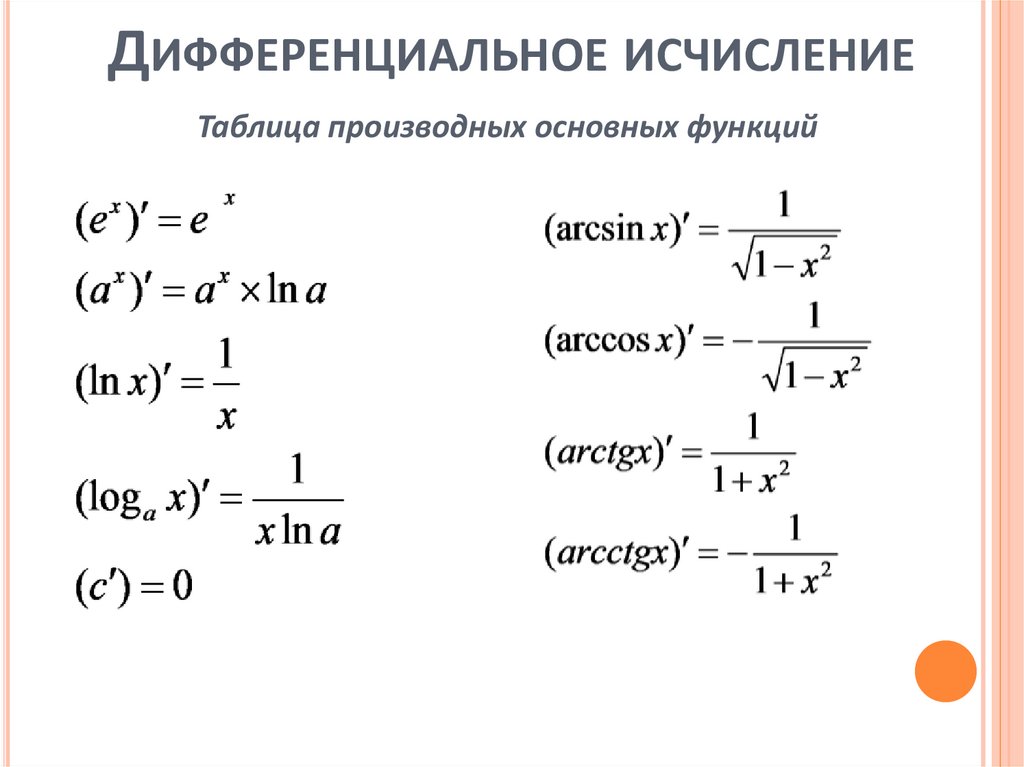
ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕТаблица производных основных функций
113.
ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕПримеры:
3
1. y 5 x
cos x x x 17
3
2
2
3
1
2 3
3
3
2
3 2
y (5 x cos x x x 17) (5 x cos x x x 17) 15 x sin x x 1
3
15 x sin x
2
2. y
y
2
3
3 x
1.
sin( 4 x)
1
2 sin( 4 x)
cos( 4 x) 4
2 cos( 4 x)
sin( 4 x) .
Дифференциал функции dy y x или
df ( x) f ( x) x
114.
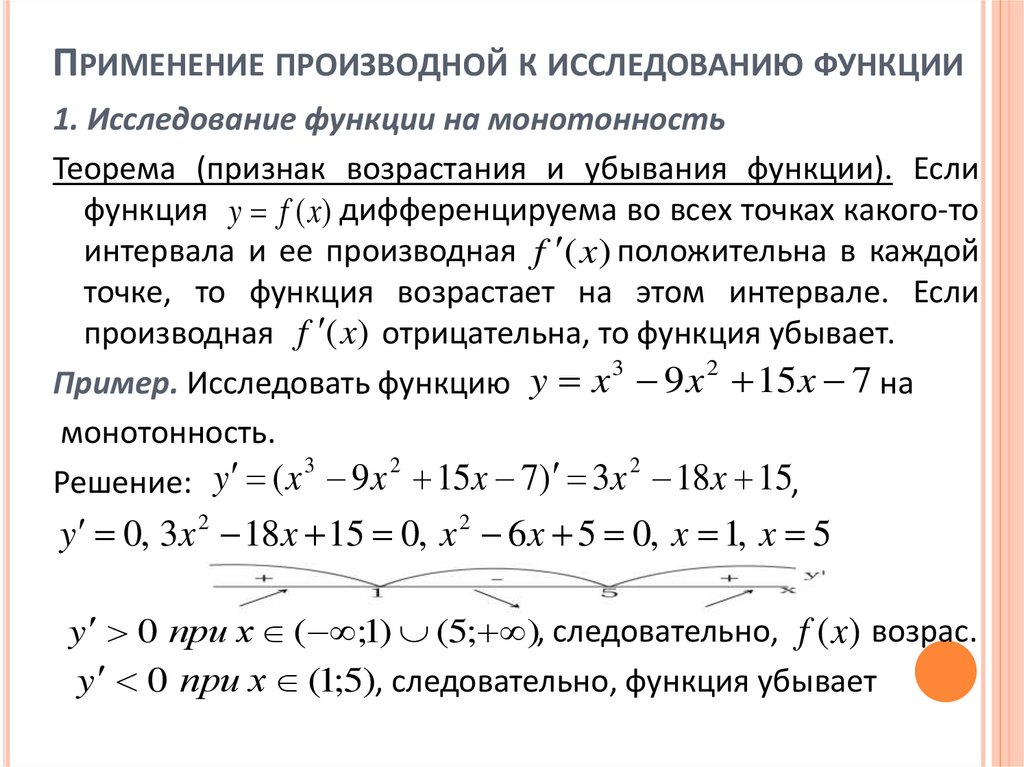
ПРИМЕНЕНИЕ ПРОИЗВОДНОЙ К ИССЛЕДОВАНИЮ ФУНКЦИИ1. Исследование функции на монотонность
Теорема (признак возрастания и убывания функции). Если
функция y f (x) дифференцируема во всех точках какого-то
интервала и ее производная f (x ) положительна в каждой
точке, то функция возрастает на этом интервале. Если
производная f (x) отрицательна, то функция убывает.
3
2
Пример. Исследовать функцию y x 9 x 15 x 7 на
монотонность.
3
2
2
Решение: y ( x 9 x 15x 7) 3x 18x 15,
y 0, 3x 2 18x 15 0, x 2 6 x 5 0, x 1, x 5
y 0 при х ( ;1) (5; ), следовательно, f (x) возрас.
y 0 при х (1;5), следовательно, функция убывает
115.
ПРИМЕНЕНИЕ ПРОИЗВОДНОЙ К ИССЛЕДОВАНИЮ ФУНКЦИИ2. Исследование функции на экстремумы
Теорема (необходимый признак экстремума, признак
Ферма). Если в точке экстремума x 0
функция имеет
производную, то производная равна нулю.
Теорема (достаточный признак экстремума). Если при
переходе через стационарную точку x 0 (движение слева
направо) производная меняет знак с «+» на «–», то точка x 0
точка максимума, если же с «–» на «+», то x 0 - точка
минимума.
Пример. В предыдущем примере точка x 1 - точка
максимума, точка x 5 - точка минимума.
116.
ПРИМЕНЕНИЕ ПРОИЗВОДНОЙ К ИССЛЕДОВАНИЮ ФУНКЦИИ3. Наименьшее и наибольшее значения функции на отрезке
Правило отыскания наибольших и наименьших значений:
1) находим производную исследуемой функции f (x) ;
2) определяем критические точки (решаем уравнение f ( x) 0);
3) вычисляем значения функции в критических точках и концах
интервала;
4) отбираем среди вычисленных значений самое большое и
самое малое.
Пример. Найти наибольшее и наименьшее значение функции
x 3 5x 2
y
6 x 1 на отрезке [0,10].
3
2
117.
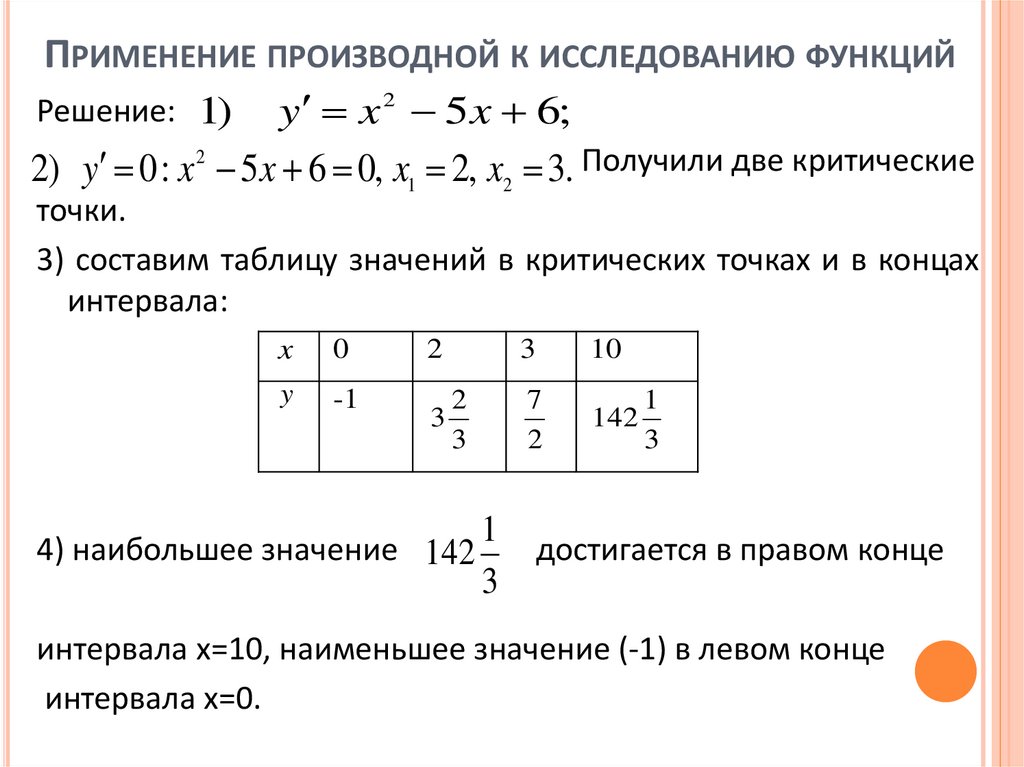
ПРИМЕНЕНИЕ ПРОИЗВОДНОЙ К ИССЛЕДОВАНИЮ ФУНКЦИЙ2
y x 5 x 6;
2
2) y 0 : x 5x 6 0, x1 2, x2 3. Получили две критические
Решение: 1)
точки.
3) составим таблицу значений в критических точках и в концах
интервала:
x
0
2
3
10
y
-1
2
3
3
7
2
1
142
3
4) наибольшее значение 142
1
3
достигается в правом конце
интервала х=10, наименьшее значение (-1) в левом конце
интервала х=0.
118.
ПРИМЕНЕНИЕ ПРОИЗВОДНОЙ К ИССЛЕДОВАНИЮ ФУНКЦИЙ4. Выпуклость, вогнутость и точки перегиба кривой
Теорема. Если функция y f (x) дважды дифференцируема
во всех точках какого-то интервала и ее вторая
производная f (x) положительна в каждой точке, то это
является признаком выпуклости кривой. Если вторая
производная f (x) отрицательна, то кривая вогнута.
Теорема (необходимый признак точки перегиба). Если точка
M ( x0 , f ( x0 )) точка перегиба, то либо f ( x0 ) 0, либо не
существует
Теорема (достаточный признак точки перегиба). Если при
переходе через точку x 0 вторая производная функции
меняет знак, то x 0 - точка перегиба.
119.
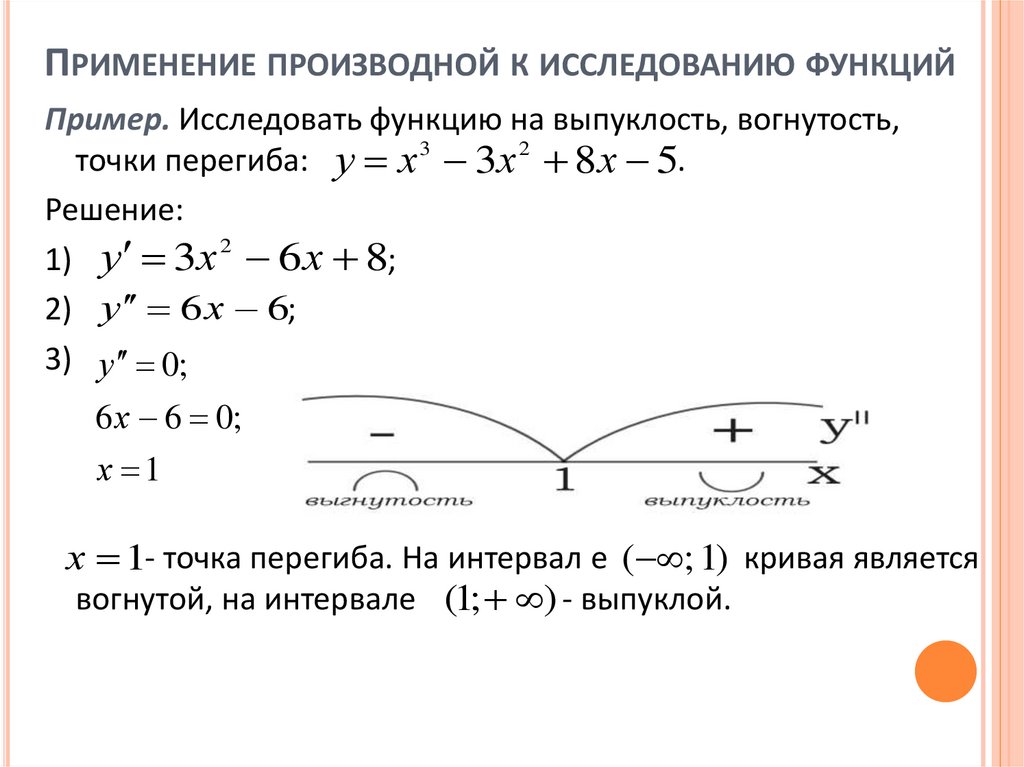
ПРИМЕНЕНИЕ ПРОИЗВОДНОЙ К ИССЛЕДОВАНИЮ ФУНКЦИЙПример. Исследовать функцию на выпуклость, вогнутость,
точки перегиба: у х 3 3х 2 8х 5.
Решение:
2
1) у 3х 6 х 8;
2) у 6 х 6;
3) у 0;
6 х 6 0;
х 1
х 1- точка перегиба. На интервал е ( ; 1) кривая является
вогнутой, на интервале (1; ) - выпуклой.
120.
ПРИМЕНЕНИЕ ПРОИЗВОДНОЙ К ИССЛЕДОВАНИЮ ФУНКЦИЙ5. Асимптоты графика функции
Прямая L называется асимптотой кривой, если расстояние
от текущей точки М на кривой до прямой L становится
бесконечно малой величиной, когда точка М
неограниченно удаляется от начала координат (т.е. когда
расстояние от М до начала координат ).
Виды асимптот:
1. Вертикальные асимптоты могут образовываться только в
точках бесконечного разрыва функции y f (x) .
2. Наклонные асимптоты. Уравнение наклонной асимптоты к
кривой y f (x) имеет вид:
f ( x)
y kx b, k lim
, b lim ( f ( x) kx)
x
x
x
121.
ПРИМЕНЕНИЕ ПРОИЗВОДНОЙ К ИССЛЕДОВАНИЮ ФУНКЦИЙx3 2
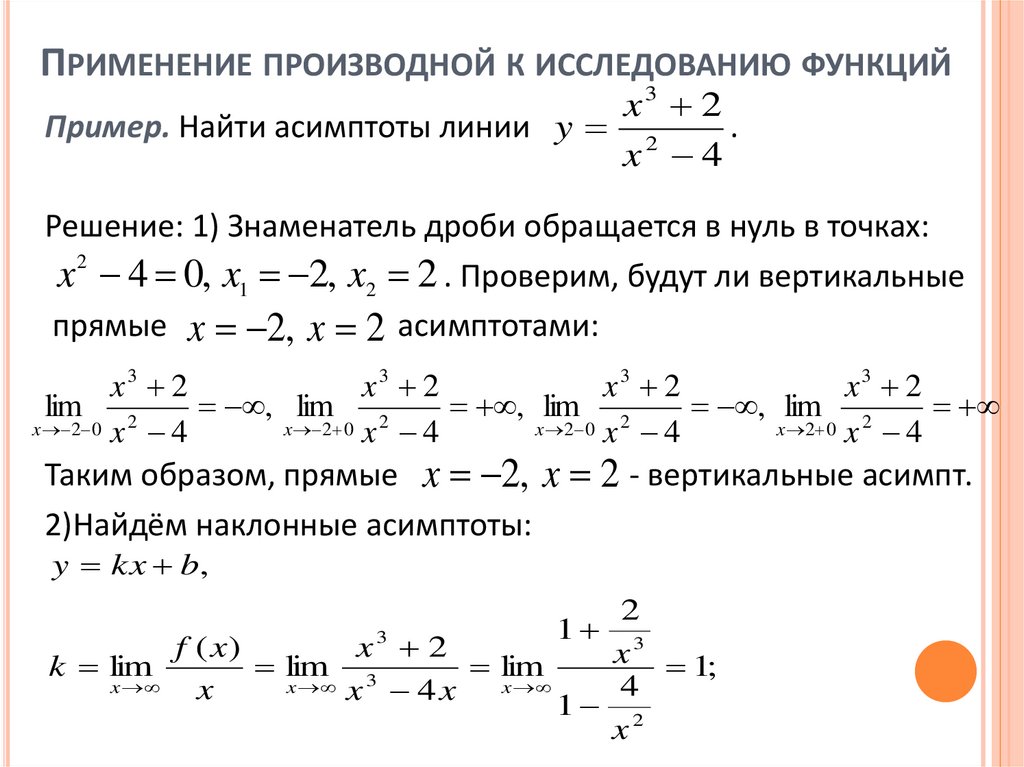
Пример. Найти асимптоты линии y 2
.
x 4
Решение: 1) Знаменатель дроби обращается в нуль в точках:
x 2 4 0, x1 2, x2 2 . Проверим, будут ли вертикальные
прямые x 2, x 2 асимптотами:
x3 2
x3 2
x3 2
x3 2
lim
, lim 2
, lim 2
, lim 2
x 2 0 x 2 4
x 2 0 x 4
x 2 0 x 4
x 2 0 x 4
Таким образом, прямые x 2,
2)Найдём наклонные асимптоты:
x 2 - вертикальные асимпт.
y kx b,
2
1 3
f ( x)
x3 2
x 1;
k lim
lim 3
lim
x
x x 4 x
x
4
x
1 2
x
122.
ПРИМЕНЕНИЕ ПРОИЗВОДНОЙ К ИССЛЕДОВАНИЮ ФУНКЦИЙx3 2
x3 2 x3 4x
b lim ( f ( x) kx ) lim ( 2
1 x) lim
2
x
x
x
x 4
x 4
4 2
2
4x 2
lim 2
lim x x 0
x
x 4 x 1 4
x2
Таким образом, уравнение наклонной асимптоты
y x.
123.
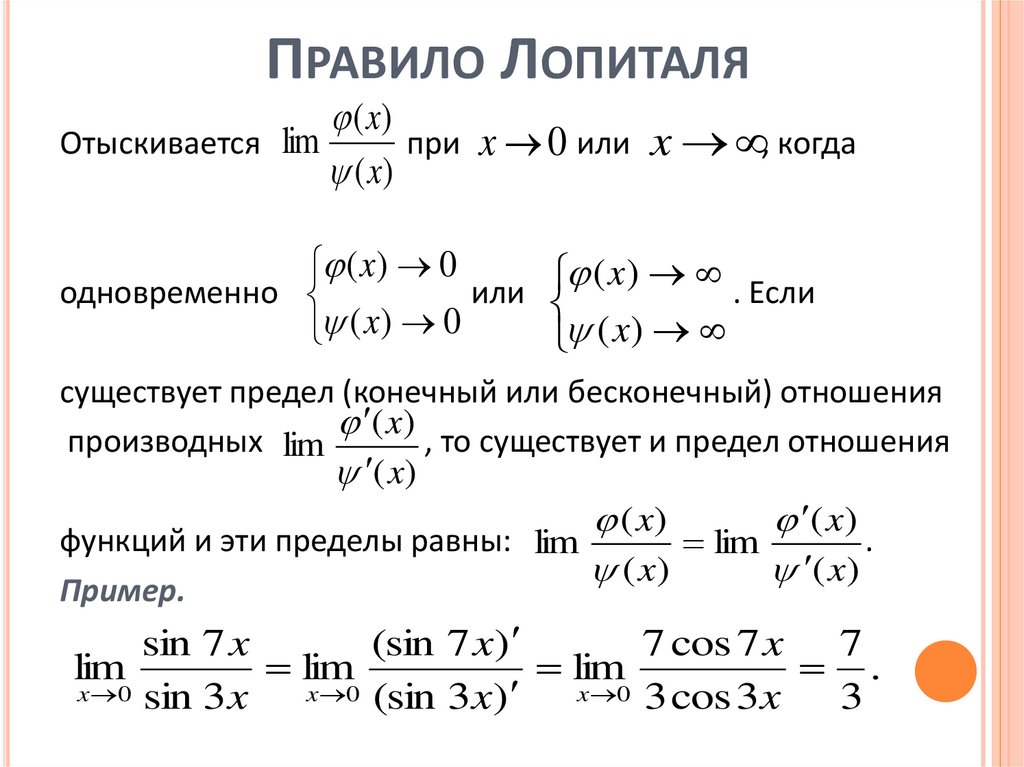
ПРАВИЛО ЛОПИТАЛЯ( x)
Отыскивается lim
при x 0 или x , когда
( x)
( x) 0
( x) . Если
одновременно
или
(
x
)
0
( x)
существует предел (конечный или бесконечный) отношения
( x)
производных lim
, то существует и предел отношения
( x)
( x)
( x)
функций и эти пределы равны: lim
.
lim
( x)
( x)
Пример.
sin 7 x
(sin 7 x)
7 cos 7 x 7
lim
lim
lim
.
x 0 sin 3 x
x 0 (sin 3 x )
x 0 3 cos 3 x
3
124.
ОБЩАЯ СХЕМА ИССЛЕДОВАНИЯ ФУНКЦИИ1. Элементарное исследование: область определения; точки
разрыва и интервалы непрерывности; точки пересечения
графика с осями координат; симметрия графика: четность,
нечетность; вертикальные и наклонные асимптоты.
2. Исследование на возрастание, убывание и точки экстремума
с помощью производной функции.
3. Выпуклость, вогнутость
второй производной.
4. Построение графика
и точки перегиба – с помощью
125.
ОБЩАЯ СХЕМА ИССЛЕДОВАНИЯ ФУНКЦИИПример.
126.
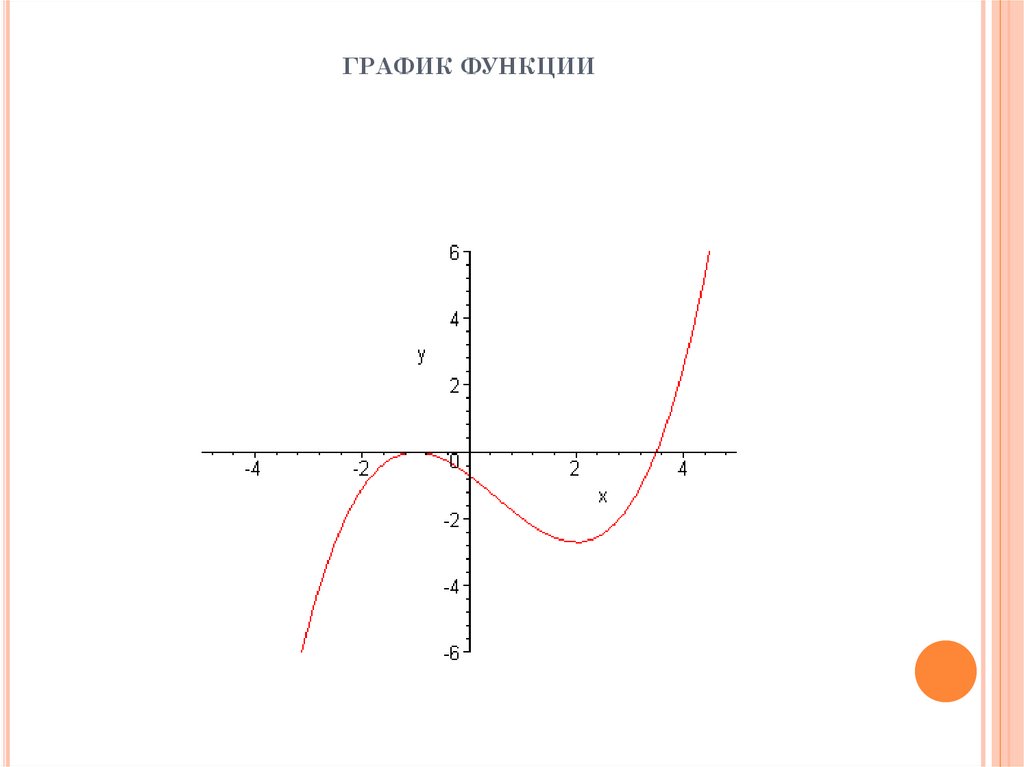
ГРАФИК ФУНКЦИИ127.
ВЫЧИСЛЕНИЕ ПЛОЩАДЕЙПлощадь фигуры в декартовых
координатах.
y
y f x
x
0
a
b
Площадь такой
фигуры, называемой
криволинейной
трапецией,
вычисляют по
b
формуле S f x dx .
a
128.
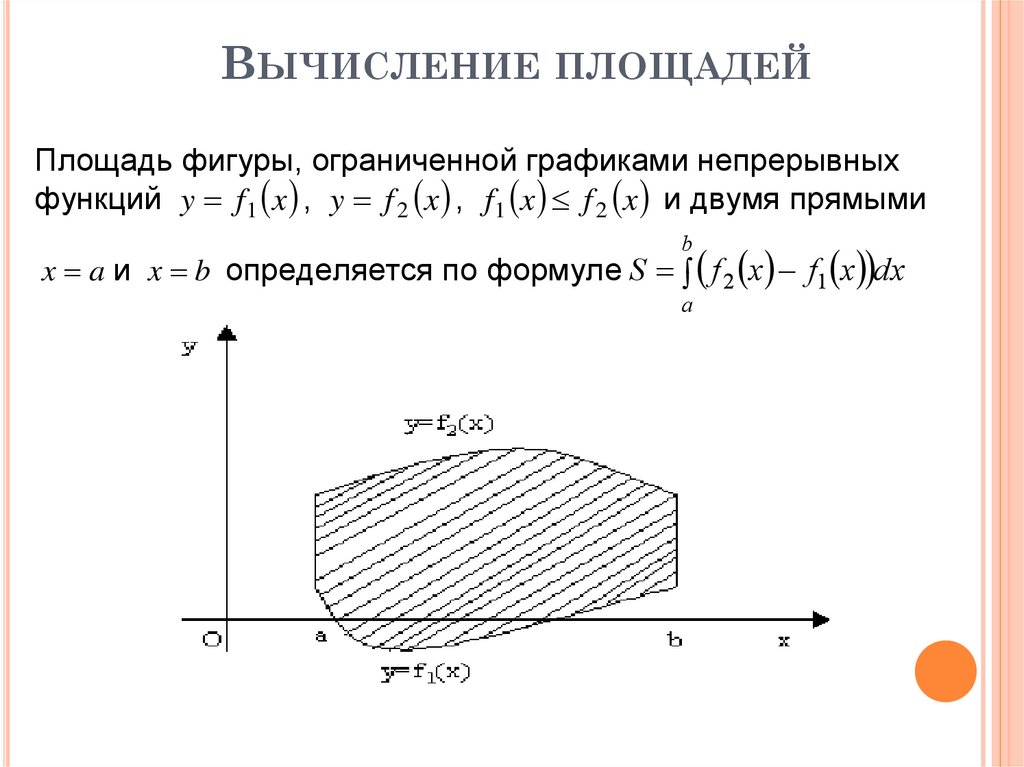
ВЫЧИСЛЕНИЕ ПЛОЩАДЕЙПлощадь фигуры, ограниченной графиками непрерывных
функций y f 1 x , y f 2 x , f1 x f 2 x и двумя прямыми
b
x a и x b определяется по формуле S f 2 x f1 x dx
a