


")












 Математика
Математика Информатика
ИнформатикаПохожие презентации:

")








Численное решение систем нелинейных уравнений СНУ
1. Численное решение систем нелинейных уравнений С Н У
2. Общий вид СНУ
F1 ( x1 , x2 , , x j , , xn ) 0F2 ( x1 , x2 , , x j , , xn ) 0
Fi ( x1 , x2 , , x j , , xn ) 0
Fn ( x1 , x2 , , x j , , xn ) 0
где F – функции нескольких переменных,
х – неизвестные
n –порядок системы
3. Методы решения СНУ:
1. Прямых методовдля решения СНУ не существует.
2. Итерационные методы.
Методы являются неустойчивыми, однако
точность полученного решения
определяется пользователем.
4. Метод Зейделя (метод простых итераций)
Ограниченный круг СНУИсходные данные:
1.
Fi(x1, x2,…, xn)
2.
Х(0)
3.
Е
5. Требование
Функции Fi(x1, x2,…, xn) должныбыть непрерывны в окрестности
точки истинного решения Х и
точки начального приближения
Х(0)
6. Метод Зейделя на примере СНУ 3-го порядка
F1 ( x1 , x 2 , x3 ) 0F2 ( x1 , x 2 , x3 ) 0
F ( x , x , x ) 0
3 1 2 3
2.
Из 1-го уравнения выражаем неизвестное х1.
Из 2-го уравнения выражаем неизвестное х2.
3.
Из 3-го уравнения выражаем неизвестное х3.
1.
7.
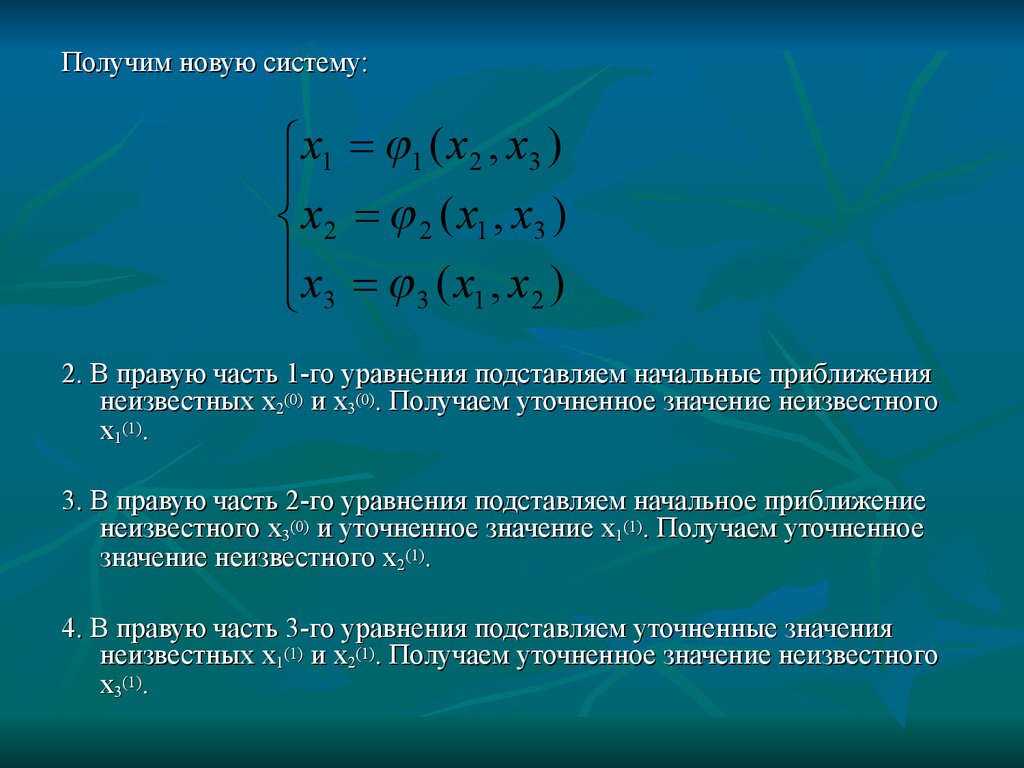
Получим новую систему:x1 1 ( x 2 , x3 )
x 2 2 ( x1 , x3 )
x ( x , x )
3
1
2
3
2. В правую часть 1-го уравнения подставляем начальные приближения
неизвестных х2(0) и х3(0). Получаем уточненное значение неизвестного
х1(1).
3. В правую часть 2-го уравнения подставляем начальное приближение
неизвестного х3(0) и уточненное значение х1(1). Получаем уточненное
значение неизвестного х2(1).
4. В правую часть 3-го уравнения подставляем уточненные значения
неизвестных х1(1) и х2(1). Получаем уточненное значение неизвестного
х3(1).
8.
5. Далее рассчитывается разность между значениями начальныхприближений и уточненными значениями неизвестных.
Если
x1(1) x1( 0 ) E
то считается, что значения х1(1)., х2(1)., х3(1)
и
являются решением данной системы. В
случае эти значения
x 2(1) x 2( 0 )противном
E
принимаются за начальное приближение и
и
(1)
( 0 )процесс повторяется.
x3 x 3
E
9.
ЗАМЕЧАНИЕМетод Зейделя применим, если
неизвестные из соответствующих уравнений
можно выразить в явном виде.
Метод Зейделя для решения СНУ не является
универсальным.
10. Примеры:
x 1 4 x 3x12 4 x23 1 0
1
2
x2 0,5 0,5 ln x1
ln x1 2 x2 1 0
x12 4 x23 sin 10 x1 cos x2 0
x1 ?
2
ln x1 2 x2 4 ln x2 x2 0
x2 ?
11. Метод Ньютона для решения СНУ
Основа: разложение функций в ряд Тейлораотносительно значений начальных
приближений неизвестных.
Затем применяется линеаризация системы.
12.
Для реализации метода Ньютонанеобходимо задать следующие данные:
1. Выражения для функций F1, F2 ,…, Fn в
аналитическом виде.
2. Выражения для частных производных
функций F1, F2 ,…, Fn по каждому
аргументу в аналитическом виде.
3. x10, x20,…, xn0.
4. Е.
13. Требование
Функции Fi(x1, x2,…, xn) должныбыть непрерывны и
дифференцируемы в окрестности
точки истинного решения Х и
точки начального приближения
Х(0)
14. Метод Ньютона на примере СНУ 3-го порядка
F1 ( x1 , x 2 , x3 ) 0F2 ( x1 , x 2 , x3 ) 0
F ( x , x , x ) 0
3 1 2 3
Задано: x10, x20 и x30.
Истинное решение системы: x1, x2 и x3.
Разность:
x1=x1-x10, x2=x2-x20,
x3=x3-x30
15. F1, F2 и F3 разлагаются в ряд Тейлора. Члены, содержащие производные старше первого порядка отбрасываются.
F1F1
F1
0
0
0
x1
x 2
x3 0
F1 ( x1 , x 2 , x3 ) F1 ( x1 , x 2 , x3 )
x1
x 2
x3
F2
F2
F2
0
0
0
x1
x 2
x 3 0
F2 ( x1 , x 2 , x3 ) F2 ( x1 , x 2 , x3 )
x1
x 2
x3
F3
F3
F3
0
0
0
x1
x 2
x3 0
F3 ( x1 , x 2 , x3 ) F3 ( x1 , x 2 , x3 )
x1
x 2
x3
Преобразуем систему.
16. Получим систему линейных алгебраических уравнений:
F1F1
F1
0
0
0
x
x
x
F
(
x
,
x
,
x
1
2
3
1
1
2
3)
x 2
x3
x1
F2
F2
F2
x1
x 2
x3 F2 ( x10 , x 20 , x30 )
x 2
x3
x1
F3
F3
F3
x1
x 2
x3 F3 ( x10 , x 20 , x30 )
x1
x 2
x3
Неизвестные - x1, x2 и x3,
Вектор-столбец свободных членов – F1, F2 и F3 в
точке начального приближения,
Коэффициенты - производные функций F1, F2 и F3
по неизвестным x1, x2 и x3 в точке начального
приближения.
17.
F1x1
F1
x 2
F1
x3
F2
A
x1
F2
x 2
F2
x3
F3
x1
F3
x 2
F3
x3
Матрица Якоби
(Якобиан)
F1 ( x10 , x 20 , x30 )
B F2 ( x10 , x 20 , x30 )
F3 ( x10 , x 20 , x30 )
СЛАУ решается любым известным методом (метод
Гаусса, метод Крамера), получаем значения
неизвестных x1, x2 и x3
x1, x2 и x3 рассчитываются по формулам:
x1=x10+ x1,
x2=x20+ x2,
x3=x30+ x3
18.
Если полученные значения x1 и x2 и x3 помодулю оказались менее заданной точности Е, то
считается, что рассчитанные значения x1, x2 и x3
являются решением данной системы нелинейных
уравнений.
Если хотя бы одно из значений x1, x2, x3 по
модулю оказалось выше заданной точности Е, то
рассчитанные значения x1, x2 и x3 принимаются в
качестве нового начального приближения и процесс
повторяется.
19.
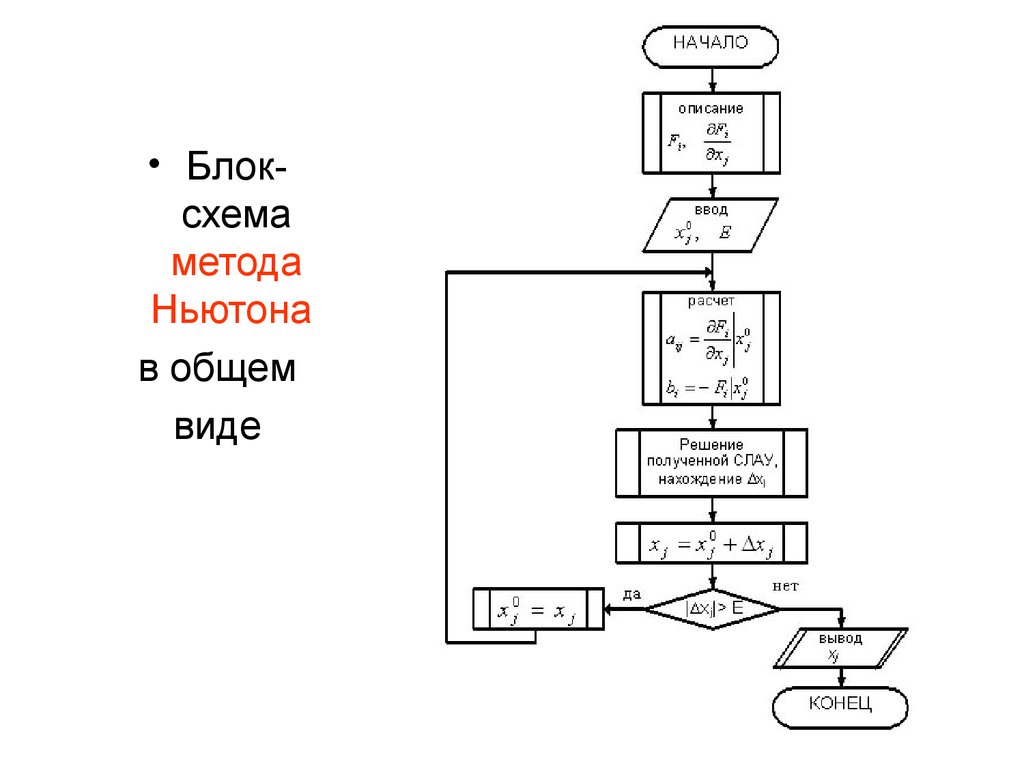
• Блоксхемаметода
Ньютона
в общем
виде
20.
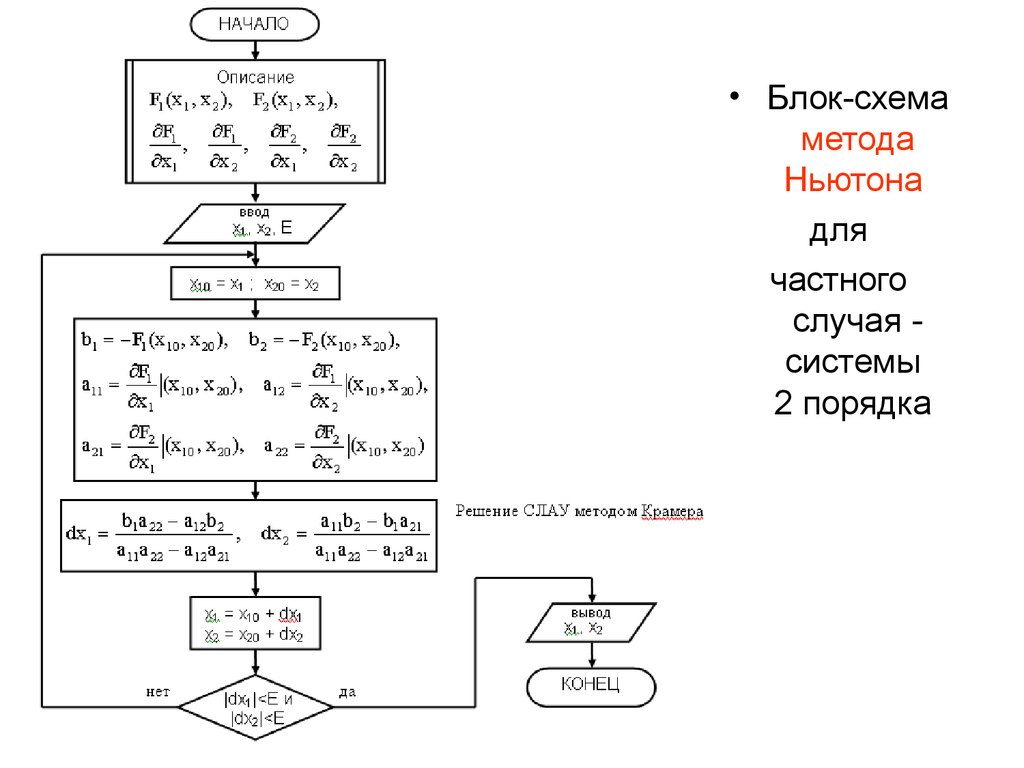
• Блок-схемаметода
Ньютона
для
частного
случая системы
2 порядка
21. Замечание
Метод Ньютона является неустойчивым,прогнозировать сходимость невозможно.
Сходимость метода зависит от порядка
системы и от удачного выбора начального
приближения решения.