


















 Физика
ФизикаПохожие презентации:


")



")


")
Кинематика
1.
Министерство образования и науки Российской ФедерацииФедеральное государственное бюджетное образовательное
учреждение высшего профессионального образования
«Кузбасский государственный технический университет
имени Т.Ф. Горбачева»
Кафедра ФИЗИКИ
А. 1309
2. Л И Т Е Р А Т У Р А
ЛИТЕРАТУРАА. А. Детлаф, Б.М. Яворский Курс физики. –
М.: Высш.шк., 2003; 2005; и т. д.
Трофимова Т.И. Курс физики. –
М.: Высш.шк., 2004; 2006; и т.д.
Чертов А.Г., Воробьев А.А. Задачник по
физике. – М.: Физматлит, 1997.,
Калашников Н. П. Физика. Интернет
тестирование базовых знаний. – М., 2008
3.
4. М Е Х А Н И К А
КлассическаяРелятивистская
Квантовая
– v << c;
–
v ~ c;
- для микрообъектов.
с = 300000000 м / c –
в вакууме
скорость света
5. Механика
Механикакинематика
Квантовая
механика
статика
динамика
Релятивистская
механика
6.
Глава 1. Кинематика§1 Определения
Совокупность тела отсчета, системы координат и
синхронизованных между собой часов образуют
систему отсчета
7.
Основные понятия:система отсчета ( С О ),
система координат ( СК ),
материальная точка ( МТ ),
радиус-вектор, координаты,
вектор перемещения,
пройденный путь,
скорость, ускорение,
кинематическое уравнение движения.
8. Физические модели
Абсолютно твердым телом называетсятакое тело, расстояние между любыми двумя
точками которого не изменяется при любых
взаимодействий этого тела с другими телами.
Материальной точкой называется тело,
размерами и формой которого можно
пренебречь в рамках данной задачи
Совокупность материальных точек образуют
систему материальных точек
9. Различают движения
Прямолинейное,криволинейное – по типу
траектории.
Равномерное
, неравномерное
– по виду кинематических
уравнений.
10.
Поступательным движением твердого теланазывается такое движение при котором прямая
проведенная через любые две точки этого тела
остается
параллельной
начальному
ее
положению при его движении
Вращательным
движением твердого тела
называется такое при котором любая точка этого
тела
двигалась бы по окружности центр
которой лежал бы на этой оси
11. внимание !
Использованы обозначения:Учебник
Лекции
Радиус-вектор
r
r
Вектор скорости
Вектор ускорения
a
а
v
12. Радиус-вектор
CО=СК+ТО+часыr
Радиус-вектор
задает положение
МТ в пространстве
x, y, z
Z
z
k
j
o
x i
X
r xi yj zk
r
МТ
координаты МТ
i , j , k - орты системы
координат
y
r x y z
2
Y
2
2
13.
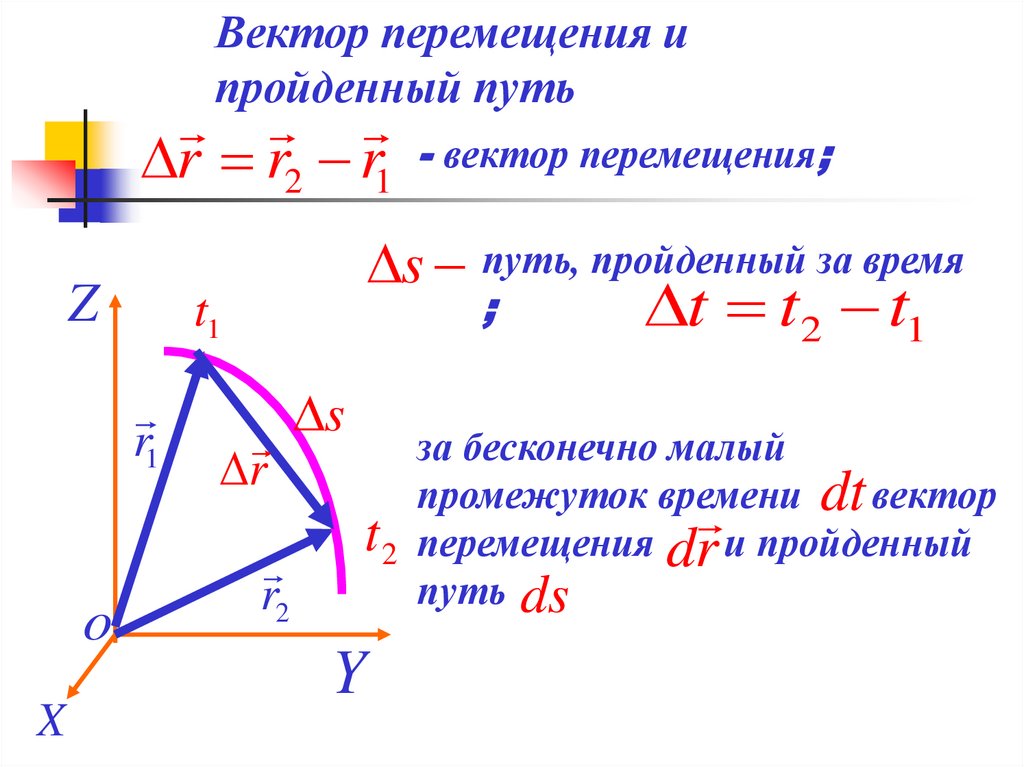
Вектор перемещения ипройденный путь
r r2 r1
Z
o
X
s путь, пройденный за время
;
t1
r1
- вектор перемещения;
s
r
r2
t2
Y
t t2 t1
за бесконечно малый
промежуток времени dt вектор
перемещения dr и пройденный
путь ds
14. Cкорость характеризует быстроту изменения положения МТ в пространстве
r1o
r
r2
s
r
< >
t
<
< >
r dr
lim
t 0 t
dt
s ds
lim
t 0 t
dt
s
>
t
- вектор средней
скорости,
- средняя скорость
(путевая),
- скорость в данный момент
времени (мгновенная),
- модуль мгновенной скорости.
15. Скорость и ее проекции связаны соотношениями:
(движение в плоскости ХОУ)x
y
y
x
xi y j
dx - проекция вектора скорости
x на ось ОХ – производная
dt координаты x по времени t ;
dy
- проекция вектора скорости на
y
dt ось ОУ – производная координаты у
по времени t ;
2
x
2
y
- модуль вектора скорости.
16. Ускорение характеризует быстроту изменения скорости по модулю и направлению
n nr1
1, 2времени
1
t1 и t 2 ;
= 2 - 1 - изменение скорости за
время
2
< >
t
d
lim
t 0 t
dt
- скорость МТ в моменты
t t2 t1
;
n n - изменение скорости по
направлению;
- изменение скорости по
величине;
- среднее ускорение;
- ускорение в данный момент времени
(мгновенное).
17. Ускорение и его проекции связаны соотношениями:
xi y j z kn
n
o
2
x
2
y
n n
2
n
2
r
d
dt
2
n
- тангенциальное
ускорение,
- нормальное ускорение.
2
z
18.
Кинематические характеристикивращательного движения
Y
S
r
n
r0
dS
d
dr
Z
A
O
S
r t
X
t
19.
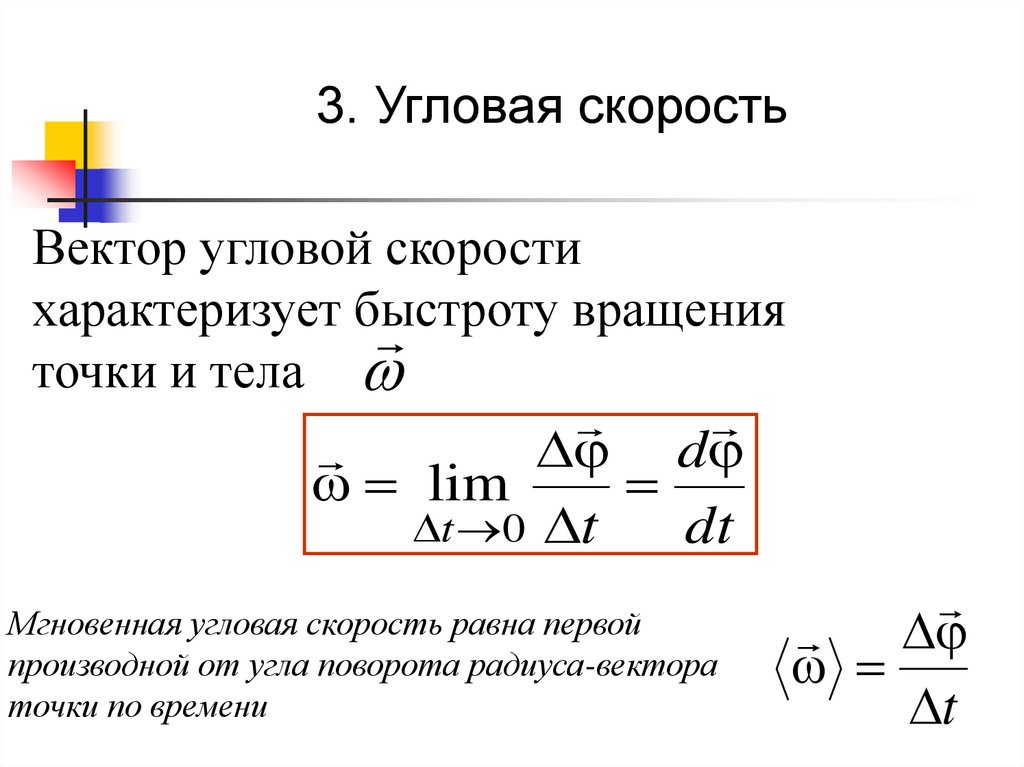
3. Угловая скоростьВектор угловой скорости
характеризует быстроту
вращения
точки и тела
d
lim
t 0 t
dt
Мгновенная угловая скорость равна первой
производной от угла поворота радиуса-вектора
точки по времени
t
20.
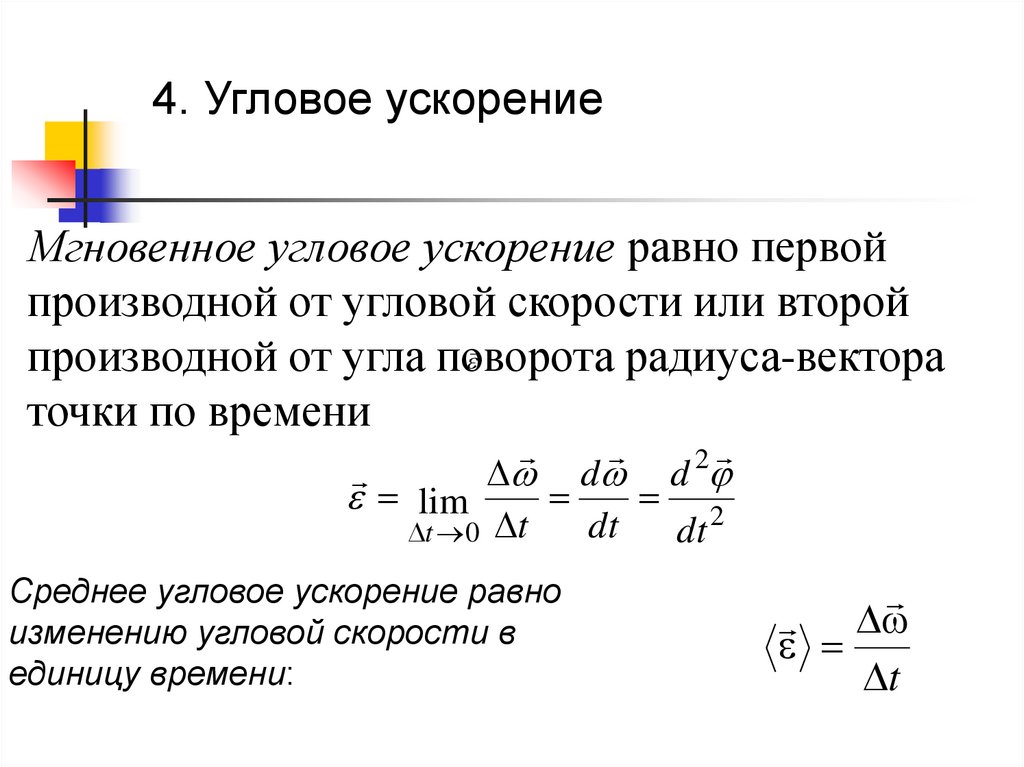
4. Угловое ускорениеМгновенное угловое ускорение равно первой
производной от угловой скорости или второй
производной от угла поворота
радиуса-вектора
точки по времени
2
d d
lim
2
dt
t 0 t
dt
Среднее угловое ускорение равно
изменению угловой скорости в
единицу времени:
t
21.
Связь между линейными иугловыми характеристиками
r
а r
аn
аn
2
r
r
2
22. КИНЕМАТИЧЕСКИЕ УРАВНЕНИЯ ДВИЖЕНИЯ
rВыражают зависимость от времени радиуса:
вектора
или координат
x, y, z
r r t , x x t , y y t , z z t .
3
2
r 3t i 5t j tk
2
9t i 10tj k
18ti 10 j
23.
Материальная точка:1) тело, очень малых размеров;
2) тело, массой которого можно
пренебречь в условиях данной задачи;
3) тело пренебрежительно малой
массы;
4) тело, размерами которого можно
пренебречь в условиях данной задачи;
5) точка, определяющая положение
точки в пространстве.
24.
Вектор перемещения МТ:1) вектор, соединяющий начальную и конечную
точки траектории;
2) вектор, соединяющий начало координат и
конечную точку траектории;
3) вектор, соединяющий конечную и начальную
точки траектории;
4) вектор, направленный из конечной точки
траектории началу координат;
5) вектор, определяющий направление вектора
скорости.
25. Модуль вектора перемещения и пройденный путь совпадают:
1) при свободном падении;2) при криволинейном движении;
3) при прямолинейном движении;
4) при прямолинейном движении без
поворота;
5) при вращательном движении.
26.
Средняя скорость перемещенияопределяется по формуле:
1)v = s / t;
2) < v > = ∆ r / ∆ t;
3) < v > = ∆ s / ∆t;
4) v = ∆ r / ∆ t ;
5) v = d r / d t .
27.
Движение называют равномерным ипрямолинейным, если
1) v = const;
2) v = const;
3) a = const;
4) a = const;
5) s = const
28.
МТ движется вдоль ОХ согласно уравнениюx А Вt Сt ,
2
3
где А>0,B>0,C>0. Какое это движение?
1) Равномерное.
2) Равноускоренное.
3) Равнозамедленное.
4) Ускоренное.
5) Замедленное.