


 Механика
МеханикаПохожие презентации:










Кинематический анализ механизмов
1. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ
2.
Кинематический анализ механизма – изучение движения звеньевмеханизма без учета масс звеньев и сил, действующих на механизм.
Задача кинематического анализа состоит в определении
перемещений звеньев, траекторий точек звеньев, а также в
нахождении скоростей и ускорений точек в функции времени или
в функции перемещения начальных звеньев.
Кинематический анализ может производиться следующими способами:
1. Графическим (с помощью построения диаграмм перемещения,
скоростей, ускорений).
2. Графоаналитическим (построение планов скоростей, ускорений со
вспомогательными расчетами по формулам).
3. Аналитическим (с помощью формул).
3.
Построение планов положениймеханизма
Максимальный размер заданного
механизма равняется
2ℓОА+ℓAB
где ℓОА и ℓАВ – действительные
длины звеньев, м.
Зададим максимальный размер
изображения
механизма
на
формате А3 равным 245 мм.
Тогда масштабный коэффициент
2lОА lAB
245
Длина изображения любого звена
на чертеже, например, кривошипа
ОА
ОА=ℓОА/μl
4.
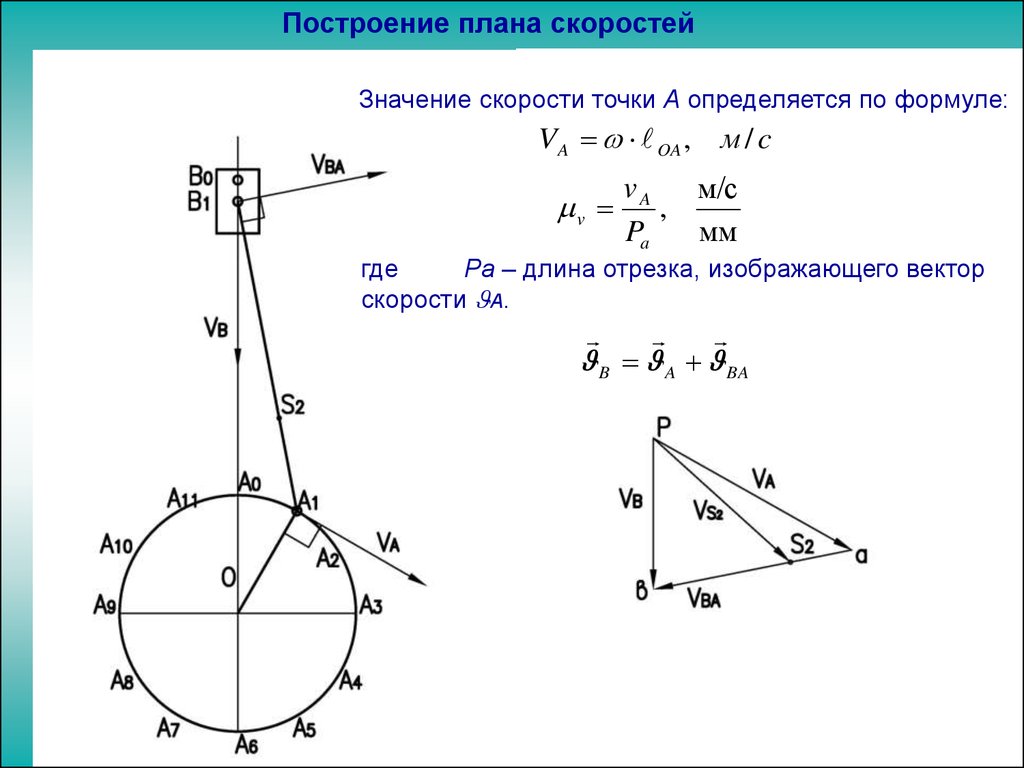
Построение плана скоростейЗначение скорости точки А определяется по формуле:
V A OA , м / c
vA
м/с
v ,
Pa
мм
где
Ра – длина отрезка, изображающего вектор
скорости А.
B A BA
5.
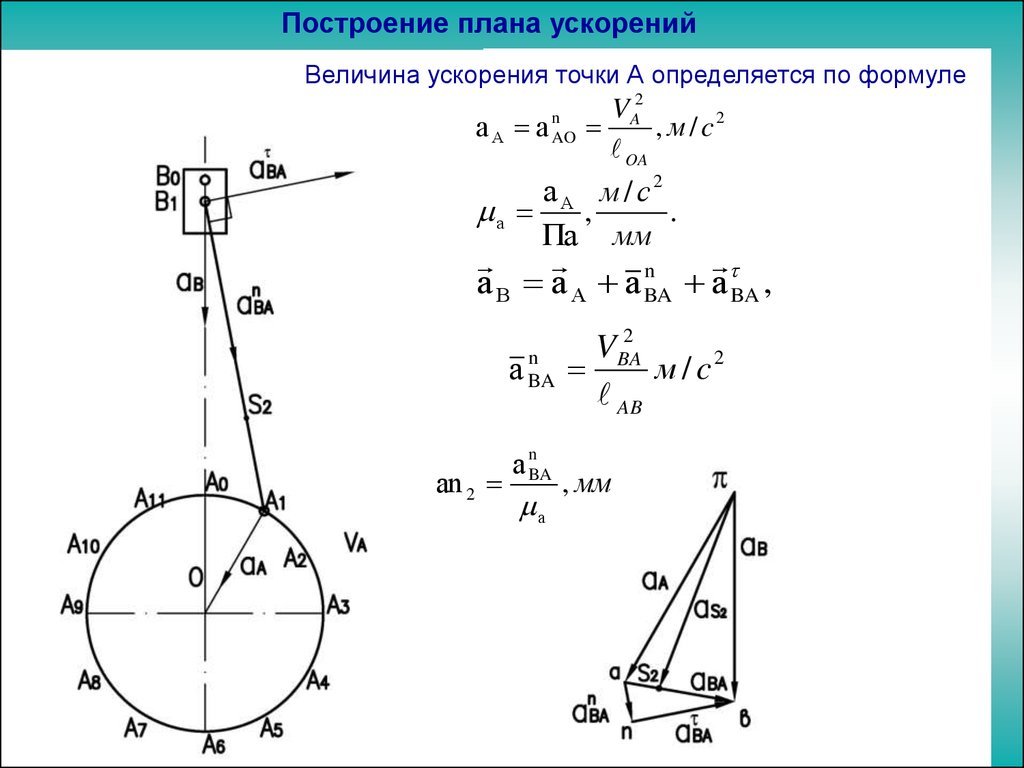
Построение плана ускоренийВеличина ускорения точки А определяется по формуле
аА а
n
AO
V A2
, м / c2
OA
а А м / с2
а
,
.
Па мм
n
а В а А а BA а BA ,
а
аn 2
n
BA
а nBA
а
2
VBA
м / c2
AB
, мм
6.
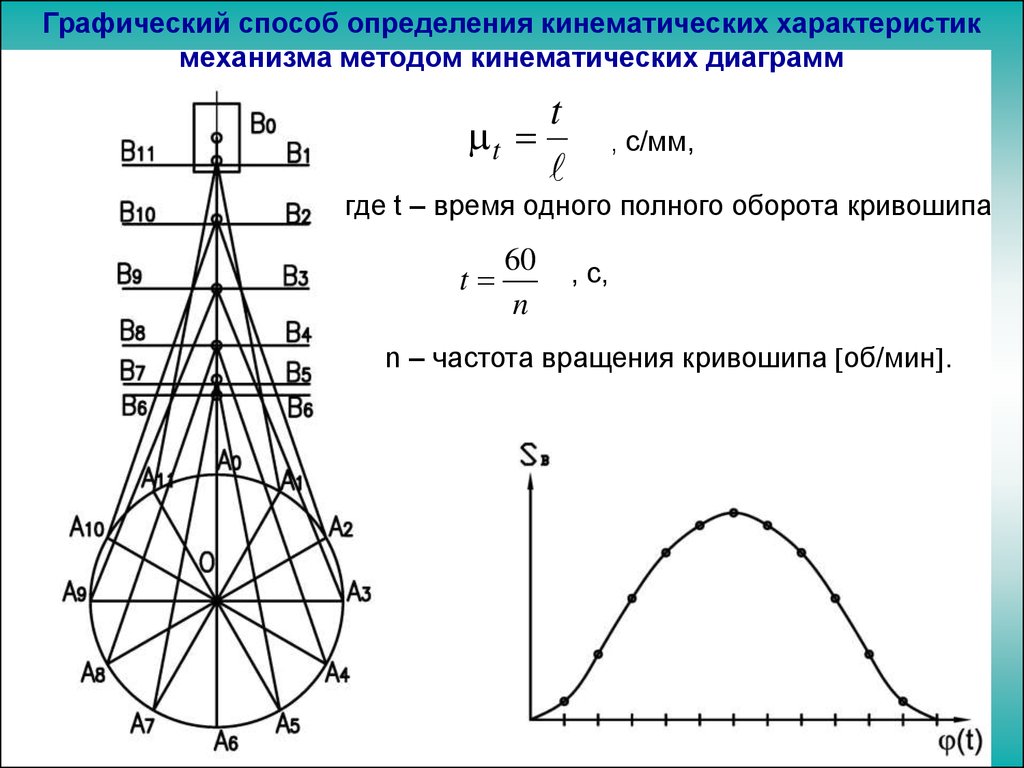
Графический способ определения кинематических характеристикмеханизма методом кинематических диаграмм
t
t
, с/мм,
где t – время одного полного оборота кривошипа
t
60
n
, с,
n – частота вращения кривошипа об/мин .
7.
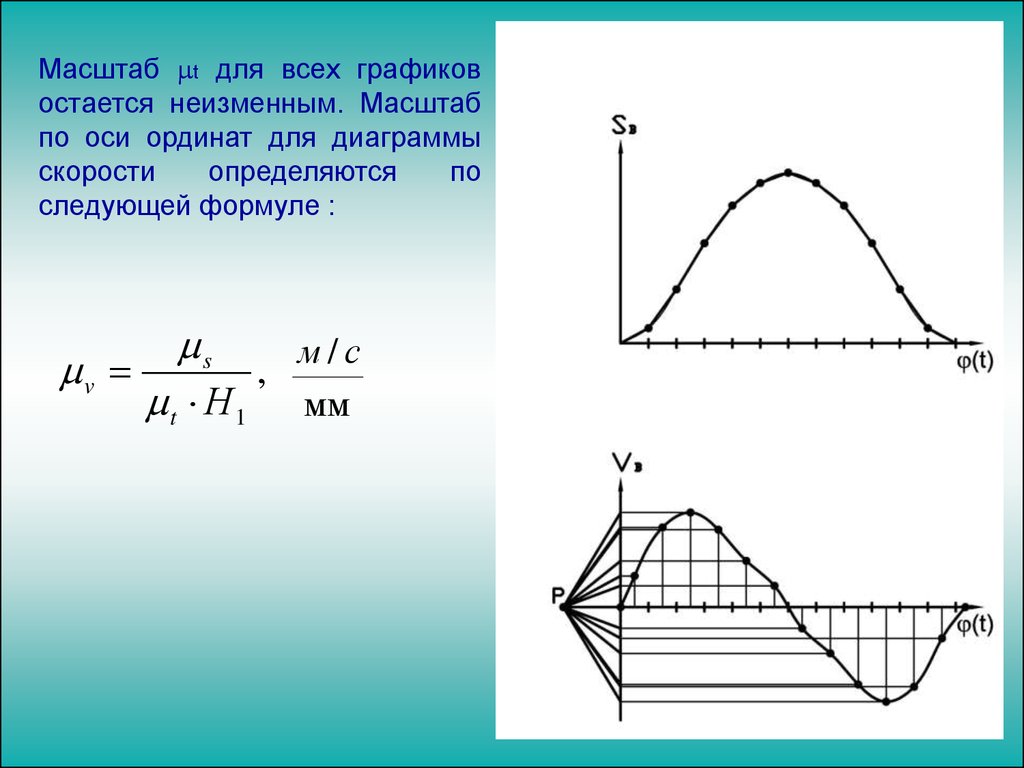
Масштаб t для всех графиковостается неизменным. Масштаб
по оси ординат для диаграммы
скорости
определяются
по
следующей формуле :
s
м/с
v
,
t Н 1 мм
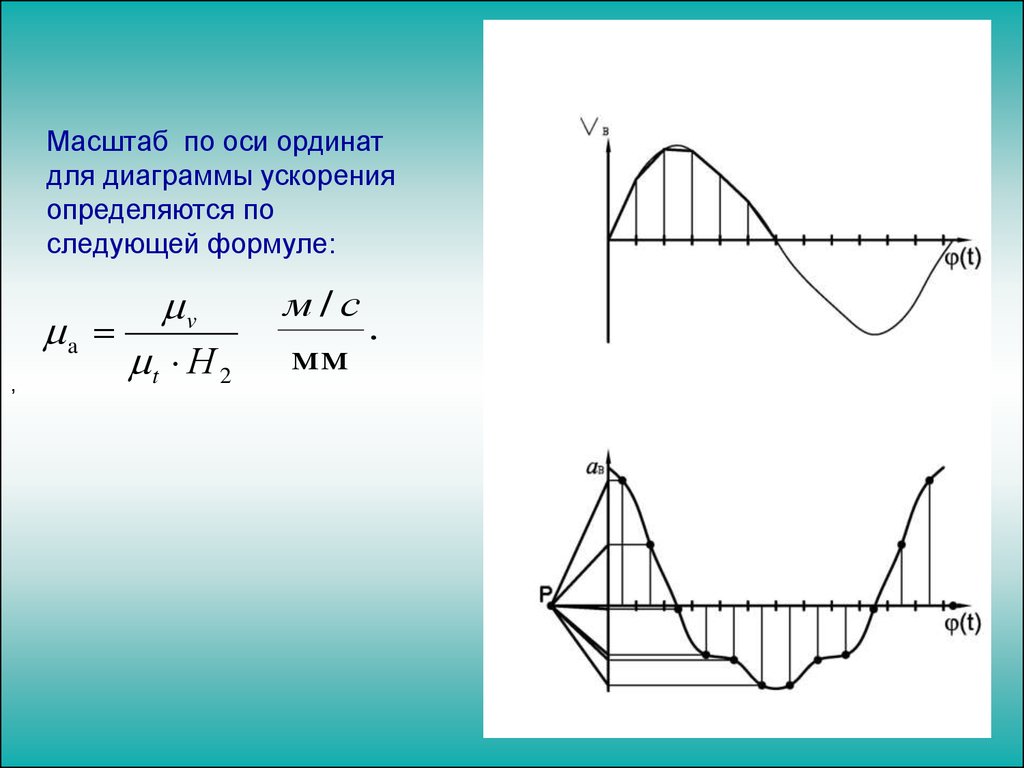
8.
Масштаб по оси ординатдля диаграммы ускорения
определяются по
следующей формуле:
a
,
v
t Н 2
м/с
.
мм