









 Механика
МеханикаПохожие презентации:










Кинематический анализ механизмов
1.
Лекция 2Кинематический
анализ
механизмов
1
Лекция 2 - Кинематический анализ механизмов
2. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ
Лекция 2КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ
Кинематический
анализ
механизма
—
определение движения звеньев механизма по
заданному движению начальных звеньев. К
кинематическим параметрам механизмов относятся:
1) перемещения (угловые и линейные) звеньев,
траектории точек звеньев, положения звеньев;
2) скорости (угловые и линейные) звеньев и точек
звеньев;
3) ускорения (угловые и линейные) звеньев и
точек звеньев.
2
Лекция 2 - Кинематический анализ механизмов
3. Методы кинематического анализа
Лекция 2Методы кинематического анализа
графоаналитические (метод планов
скоростей и ускорений, численные методы с
применением ЭВМ);
аналитические (методы с
использованием замкнутых векторных
контуров).
графические (метод кинематических
диаграмм, метод обращения движения).
3
Лекция 2 - Кинематический анализ механизмов
4. Данные для расчёта
Необходимые данные для выполнениякинематического анализа:
размеры звеньев механизма заданы в дано
кинематическая схема механизма.
Кинематическая схема – графическое изображение
соединения звеньев в кинематические пары с
указанием размеров звеньев.
4
5. ВХОД НЫЕ И ВЫХОДНЫЕ ЗВЕНЬЯ Различают входные и выходные звенья механизма. Выходным называют звено, совершающее движение, для
ВХОДНЫЕ И ВЫХОДНЫЕ ЗВЕНЬЯРазличают входные и выходные звенья
механизма.
Выходным называют звено, совершающее
движение, для которого предназначен механизм.
Входным называют звено, которому сообщается
движение, преобразуемое механизмом в
требуемое движение выходного звена.
Число входных звеньев обычно равно числу
степеней свободы механизма W.
5
6. Кинематика входных звеньев
Схемы входных звеньев механизмов6
Лекция 2 - Кинематический анализ механизмов
Лекция 2
7. Кинематика входных звеньев
Лекция 2При вращательном движении входного звена скорость любой
его точки А направлена перпендикулярно к звену в сторону
вращения и равна по модулю
VA lOA .
(1)
n
t
Ускорение т.А равно: a A a A a.A .
(2)
Модуль нормальной составляющей ускорения
2
n
2
V
или
(3)
n
A .
a A lOA
aA
lOA
Модуль тангенциальной составляющей ускорения
atA
lOA .
При поступательном движении входного звена скорость и
ускорение любой его точки параллельны направляющей.
7
Лекция 2 - Кинематический анализ механизмов
(4)
8. Графические методы
Лекция 2Изображение кинематической схемы механизма при
выбранном масштабном коэффициенте
,
l
соответствующее определенному положению начального
звена, называется планом механизма .
Планы механизма, строятся за цикл движения.
Планы механизма определяют положения, законы
перемещения звеньев, например,
S f ( ), f ( ).
8
Лекция 2 - Кинематический анализ механизмов
9. План КШМ
9Лекция 2
10.
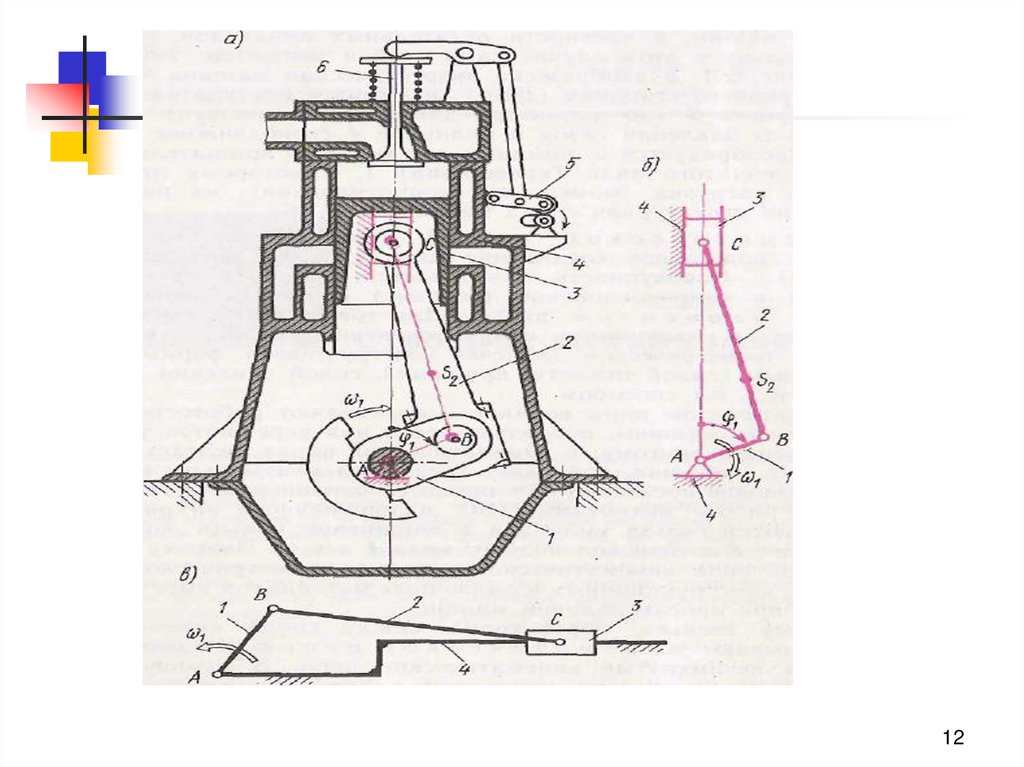
Пример плоских механизмов с низшимипарами.
Кривошипно-ползунный механизм (см. ниже на
рисунке ДВС: а — конструкция; б — схема) —
один из самых распространенных, он является
основным механизмом в поршневых машинах
(двигатели внутреннего сгорания, компрессоры,
насосы), в ковочных машинах и прессах и т. д.
На рис. в изображена схема внеосного
(дезаксиального) кривошипно-ползунного
механизма.
10
11.
11Лекция 2 - Кинематический анализ механизмов
12.
1213.
14.
14Лекция 2 - Кинематический анализ механизмов