













 Физика
ФизикаПохожие презентации:

")








Вычисление скорости точки при вращении тела. (Лекция 2)
1.
Лекция № 22.
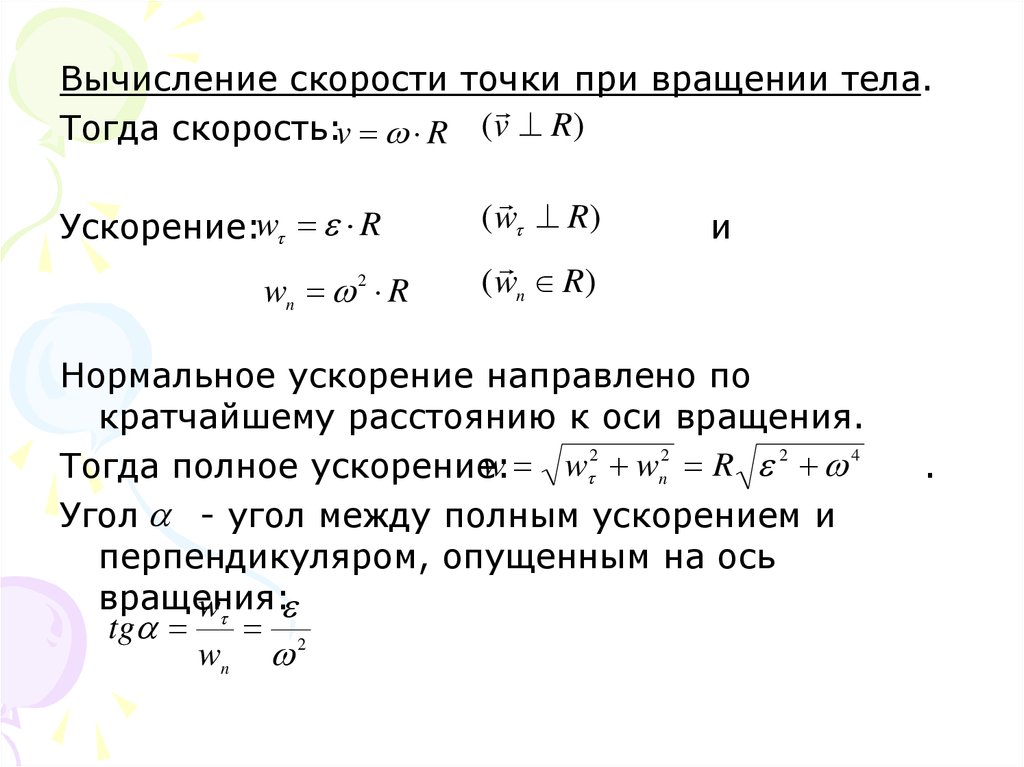
Вычисление скорости точки при вращении тела.Тогда скорость:v R (v R)
Ускорение:w R
wn 2 R
( w R)
( wn R)
и
Нормальное ускорение направлено по
кратчайшему расстоянию к оси вращения.
w w 2 wn2 R 2 4
Тогда полное ускорение:
Угол - угол между полным ускорением и
перпендикуляром, опущенным на ось
вращения:
w
tg
2
wn
.
3. 2.3. Плоскопараллельное движение твердого тела
Определение. Движение твердого тела, прикотором любая его точка движется в
плоскости, которая параллельна общей для
всех неподвижной плоскости, называется
плоскопараллельным.
4.
Теорема. Любое перемещение плоской фигурыможно заменить совокупностью 2 движений:
1) поступательное движение совместно с
полюсом;
2) вращательное движение относительно
полюса.
x x A (t ),
Характеристики
y y A (t ), плоскопараллельного движения:
(t ).
При этом третье уравнение не зависит от выбора
полюса.
Угловая скорость и ускорение определяется
также, как и при вращательном движении, за
исключением того, что вектор имеет начало в
точке, являющейся полюсом.
5. Скорость точки плоской фигуры через скорость полюса.
Пусть т. А - полюс, известныvA
скорость т. В.
vB vA vAB
где v AB
AB и vAB AB
и
. Определим
6. Мгновенный центр скоростей. Способы его нахождения.
Определение. Точка плоской фигуры, скоростькоторой в данный момент времени равна 0,
называется мгновенным центром скоростей
(мцс).
Для любого тела, совершающего плоское
движение справедлива формула:
vC
vA
vB
AP BP CP
Способы нахождения МЦС.
7. 3. Сложное движение МТ
1. Основные понятия и определения.Определение. Движение точки, при котором
она участвует в двух или более
движениях одновременно, называется
M
сложным.
z1
y
z
Определение. Движение точки
rM
O
относительно неподвижной
x
r
O
называется O
системы отсчета
rM
y1
1
абсолютным ( ).
x1
8.
Определение. Движение точки относительноподвижной системы отсчета называется
относительным ( ) и обозначается индексом
r
(relativus (лат.) - относительный).
Определение. Движение подвижной системы
отсчета относительно неподвижной называется
e
переносным
( ) и обозначается
индексом
rO
(entraner (лат) – увлекать за собой).
9. Абсолютная скорость и абсолютное ускорение точки.
Определение. Абсолютной скоростью(ускорением) т. М, участвующей в сложном
движении, называется ее скорость
(ускорение) относительно неподвижной
системыv координат.
v r ve
Скорость:
Теорема Кориолиса. Абсолютное ускорение
точки складывается из относительного,
переносного
ускорения, а также ускорения
Кориолиса:
w wr we wK
10. 4. Ускорение Кориолиса. Правило Жуковского.
Определение. Ускорение Кориолиса – это вектор,равный удвоенному векторному произведению
вектора угловой скорости переносного
вращения на вектор скорости относительного
движения.
Длина
вектора определяется по формуле:
wK 2 e vr sin( e , vr )
11.
Правило Жуковского.1. Строим плоскость, перпендикулярную вектору
e
угловой скорости:
.
2. Проецируем на эту плоскость вектор
a
пр
v
относительной плоскости:
.
r
3. Поворачиваем полученный вектор на угол 90
градусов в сторону вращения угловой
скорости:
a1 a, a1
.
4. Полученный вектор восстанавливаем при
wK переноса
a1
помощи параллельного
до точки М.
Получим вектор ускорения Кориолиса:
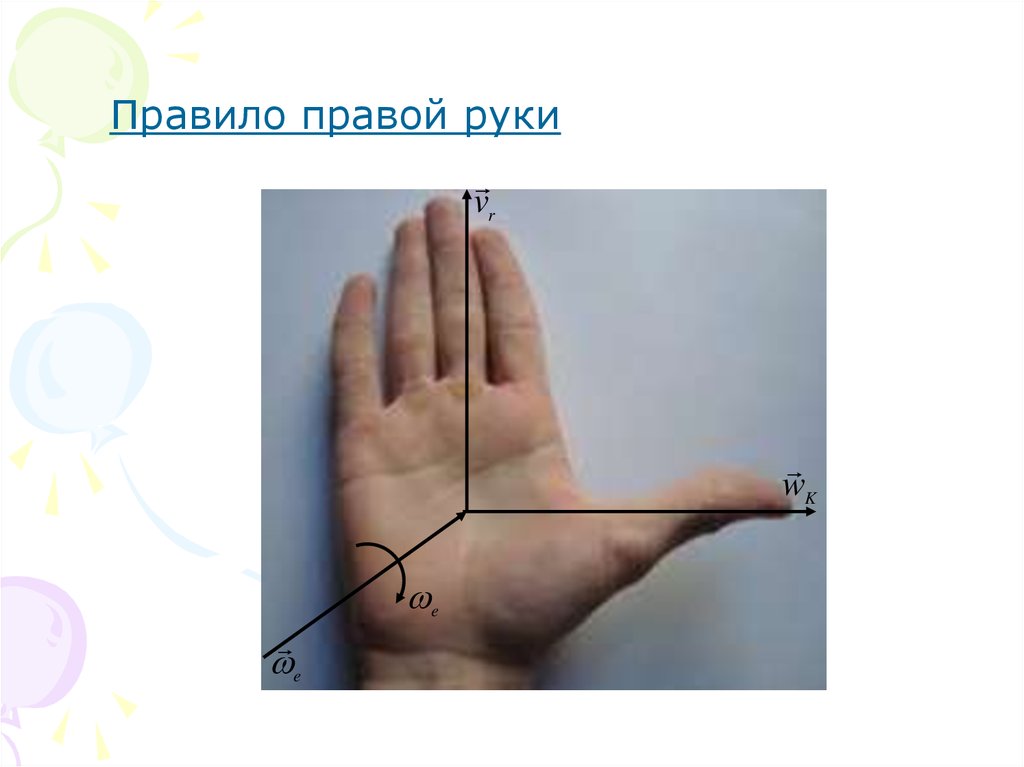
12.
Правило правой рукиvr
wK
e
e
13. Кинетика
Изучает движение тел с учетомпричин, вызвавших это
движение
14. 1. Динамика материальной точки
1.1. Основные аксиомы динамики.1. Аксиома инерции.
Существуют такие инерциальные системы
отсчета, в которых если на МТ не
действует никакой объект, то она не
изменяет своего кинематического
состояния.
15.
2. Основной закон динамики.Ускорение любой свободной МТ прямо
пропорционально действующей силе
и обратно пропорциональна массе:
F
w
m
16.
3. Аксиома действия ипротиводействия.
Сила действия 1-ой МТ на вторую
вызывает со стороны 2-ой МТ
противодействие, равное по величине
действию и обратно по направлению.
17.
4. Аксиома независимости действиясил.
Результат действия некоторой системы
сил на МТ не зависит от порядка
k
приложения сил
в данную
i 1 Fi
w точку, т.е.
материальную
m
18.
5. Аксиома связи.Определение. Связью называют тело,
ограничивающее свободу
перемещения заданного тела. Если на
тело наложена связь, то оно
несвободно.
Любую связь можно отбросить, заменив
ее действие силой, которую называют
реакцией связи.
19.
Все задачи на динамику МТ делятся надва типа:
Первая задача динамики (прямая). По
заданной массе и закону движения
определить силу, действующую на
МТ.
Вторая задача динамики (обратная). По
заданной массе и силе определить
кинематические характеристики, если
заданы начальные условия.
20. 1.2. Движение точки по гладкой поверхности
Определение. Поверхность называетсягладкой, если реакция поверхности
направлена по нормали к этой
Rповерхности:
N
R N
w
21.
Определение. Поверхность называетсяшероховатой, если реакция поверхности
направлена не по нормали к этой
поверхности:
R N Fтр
R
Fтр
N
w
Fтр
Fтр tg N f N
tg
N
22. 2. Теория моментов
2.1. Алгебраический момент силыотносительно точки.
Определение. Алгебраическим моментом
силы относительно точки называется
произведение величины силы на плечо,
взятое со знаком «+», если сила
M O ( F ) F h , где плечо – кратчайшее
расстояние от моментной точки до
линии действия силы
23.
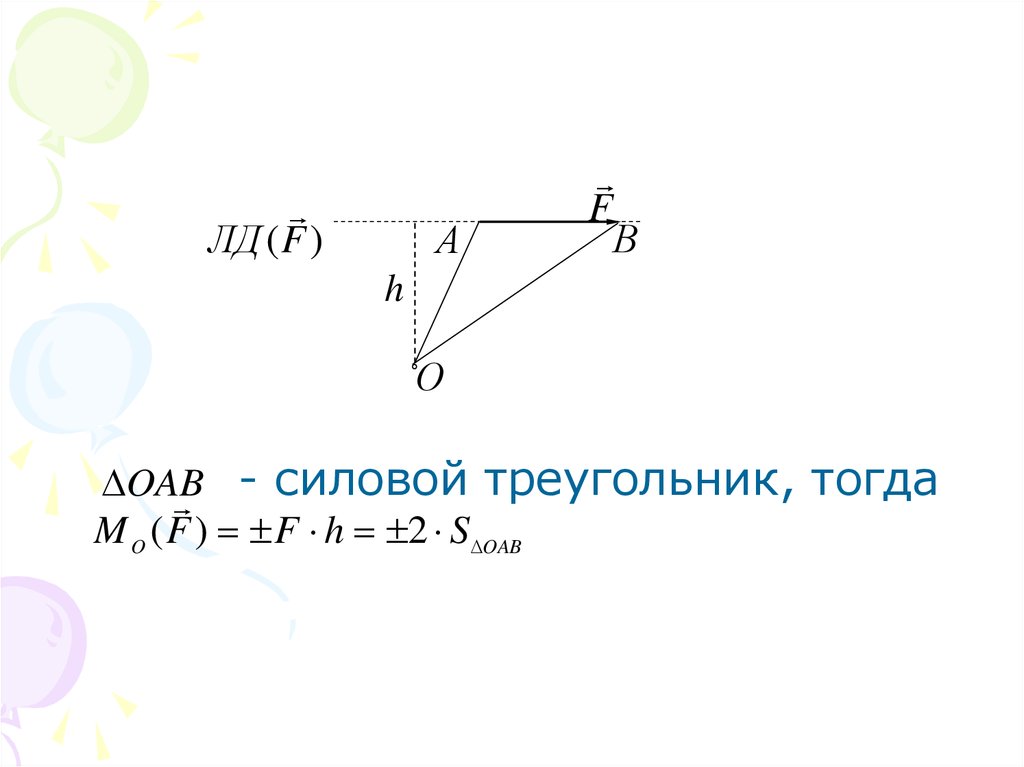
ЛД (F )А
F
В
h
О
OAB
- силовой треугольник, тогда
M O ( F ) F h 2 S OAB
24.
Свойства:1. От переноса силы вдоль линии
действия алгебраический момент не
меняется.
2. Если моментная точка принадлежит
линии действия, то алгебраический
момент
M O ( F )равен
M O0.
(F )
3.
.
M O ( F1 F2 ) M O ( F1 ) M O ( F2 )
4.
.