











 Физика
ФизикаПохожие презентации:



 индивидуального объекта")





")
Моделирование динамических испытаний автоколебательного следящего гидропривода
1.
МИНОБРНАУКИ РОССИИФедеральное государственное бюджетное образовательное учреждение
высшего образования
«Тульский государственный университет»
Институт высокоточных систем им. В.П. Грязева
Кафедра систем автоматического управления
Воробьев В.В.,
проф. кафедры САУ
Дисциплины:
«Системы наведения ЛА», «Статистическая динамика»,
«Эксплуатация и испытания СУЛА», «Контроль и диагностика СУЛА»
Презентация на тему:
«МОДЕЛИРОВАНИЕ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ
АВТОКОЛЕБАТЕЛЬНОГО СЛЕДЯЩЕГО ГИДРОПРИВОДА»
1
2.
КЛАССИФИКАЦИЯ ИСПЫТАНИЙ СЛЕДЯЩИХ СИСТЕМ2
3.
КЛАССИФИКАЦИЯ МОДЕЛЕЙСЛЕДЯЩИХ СИСТЕМ
М
одели
Теоретические
Экспериментальные
Содержательные Формализованные Физические М
атематические Комбинированные
Прямойаналогии М
аш
инные
ЦАФК Полунатурные
АВМ
ЦВМ
ГВС
(аналоговые) (циф
ровые) (гибридные)
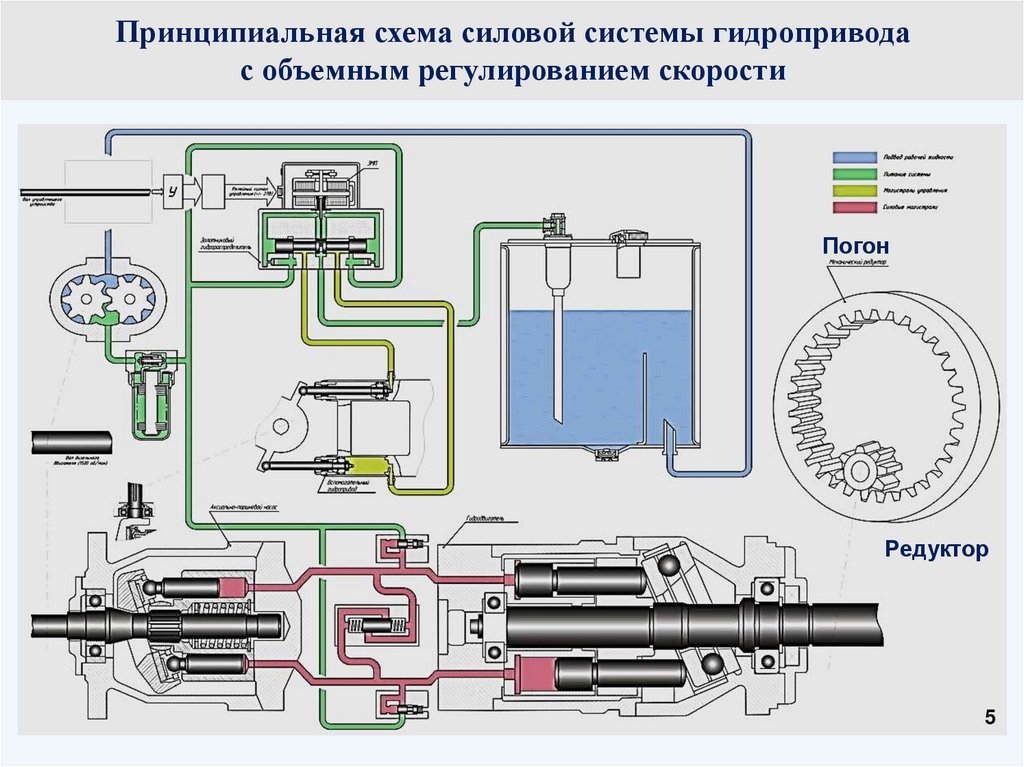
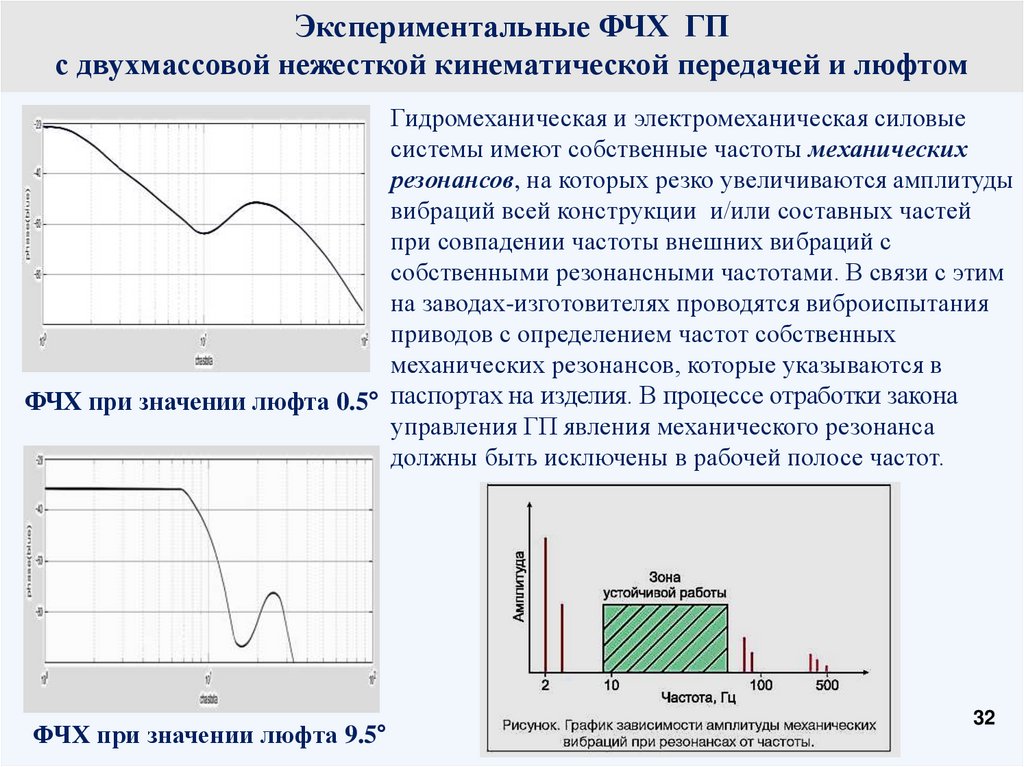
Основу стенда для испытаний гидропривода (ГП), который представляет собой
многокаскадную систему, составляет комбинированная (физико-математическая) модель.
В ФММ последовательно соединены экспериментальные модели следующих типов:
- Математическая модель (ММ) непрямой аналогии (ММНА), т.е. машинная модель,
реализованная на ПК, регулятора и каскадов усиления, которые управляют углом поворота
люльки гидронасоса переменной производительности (см. слайд 5);
- ММ прямой аналогии (ММПА) гидравлической передачи (гидронасос переменной
производительности – гидромотор), которая реализована на основе прямой аналогии в виде
электромеханической передачи на базе электродвигателя (см. слайды 5, 26);
- Физическую модель (ФМ) многомассовой нежесткой кинематической передачи с трением и
3
люфтом и внешними нагружающими устройствами (см. слайды 25, 26)
4.
ПОСТАНОВКА ЗАДАЧИ• Объекты исследования:
1) Автоколебательный следящий гидропривод (ГП) объемного регулирования скорости
горизонтального канала наведения управляемого комплекса. ГП представляет собой
гидравлическую силовую следящую систему с несколькими каскадами усиления (слайд №5).
2) Комбинированная ФММ составляет основу стенда. Математическая часть ФММ содержит
ММНА, т.е. компьютерную ММ части каскадов усиления ГП (электрон. усилитель,
гидрораспределительное устройство, гидропривод люльки гидронасоса). Физическая часть
содержит ММПА, которая методом прямой аналогии моделирует выходной каскад усиления ГП
(«гидронасос переменной производительности – гидромотор»), а также ФМ кинематической
передачи (КП). ФМ обеспечивает сохранение физической природы процессов оригинала в КП.
СТЕНД предназначен для экспериментального исследования (до создания натурного образца)
влияния на динамику и точность ГП таких особенностей КП как: многомассовость, нежесткость,
люфт, трение, причем, что важно, с сохранением их физической природы.
• Предмет исследования: динамика, точность и помехоустойчивость ГП в рабочих режимах
эксплуатации в условиях изменения параметров системы и кинематической передачи, а также
воздействия шумов аппаратуры.
• Метод исследования: комплексный, основанный на совместном использовании методов
теории автоматического управления, теорий подобия и моделирования, теории испытаний.
• Цель исследования: проектирование ФММ, которая обеспечит отработку закона
управления ГП до создания натурного образца при сравнительно низких материальных затратах.
В стенде натурная гидропередача заменена электромеханической (на базе электродвигателя).
Практически важно, что стоимость ФММ в десятки раз меньше стоимости натурного ГП, а
потребляемая ФММ мощность в сотни раз меньше мощности, потребляемой ГП.
4
5.
Принципиальная схема силовой системы гидроприводас объемным регулированием скорости
Погон
Редуктор
5
5
6.
Эксплуатация гидроприводов объемного регулированияЭКСПЛУАТАЦИОННЫЕ ПРЕИМУЩЕСТВА ГИДРОПРИВОДОВ:
Возможность развить большое усилие при относительно малом объеме двигателя;
Бесступенчатое и простое управление скоростью и крутящим моментом;
Надежное и простое предохранение от перегрузки;
Широкие диапазоны скоростей и ускорений обеспечивают быстрые и медленные высокоточные
технологические операции, частые переключения в режиме возвратно-поступательных движений.
НЕДОСТАТКИ ГИДРОПРИВОДОВ:
Проблема утечек рабочей жидкости (РЖ) через уплотнения и зазоры при высоких давлениях;
Проблема кавитации, что снижает ресурс работы элементов ГП;
Зависимость вязкости РЖ от температуры окружающей среды; сильный нагрев РЖ в процессе
работы, что требует применения специальных охладительных устройств и средств тепловой защиты;
Необходимость обеспечения чистоты РЖ в процессе эксплуатации и защиты от проникновения в
нее воздуха;
Проблема сжимаемости РЖ из-за растворения в ней воздуха;
6
Пожароопасность (в случае применения горючей РЖ).
7.
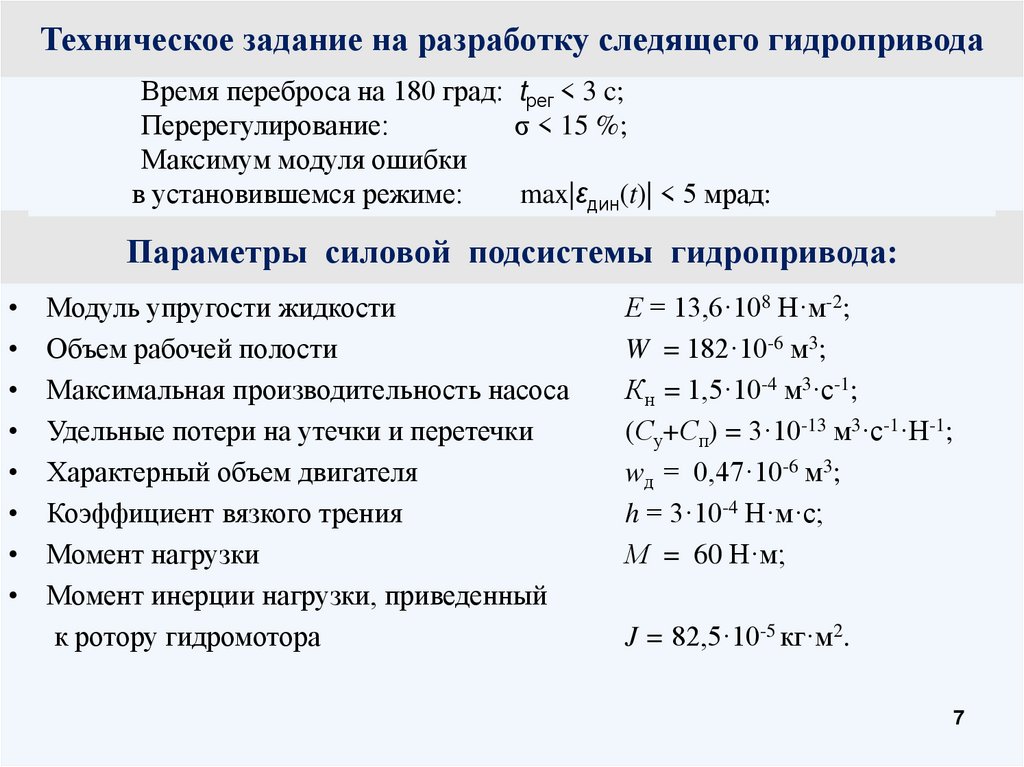
Техническое задание на разработку следящего гидроприводаВремя переброса на 180 град: tрег < 3 c;
Перерегулирование:
σ < 15 %;
Максимум модуля ошибки
в установившемся режиме:
max|εдин(t)| < 5 мрад:
Параметры силовой подсистемы гидропривода:
Модуль упругости жидкости
Объем рабочей полости
Максимальная производительность насоса
Удельные потери на утечки и перетечки
Характерный объем двигателя
Коэффициент вязкого трения
Момент нагрузки
Момент инерции нагрузки, приведенный
к ротору гидромотора
Е = 13,6·108 Н·м-2;
W = 182·10-6 м3;
Кн = 1,5·10-4 м3·с-1;
(Су+Сп) = 3·10-13 м3·с-1·Н-1;
wд = 0,47·10-6 м3;
h = 3·10-4 Н·м·с;
М = 60 Н·м;
J = 82,5·10-5 кг·м2.
7
8.
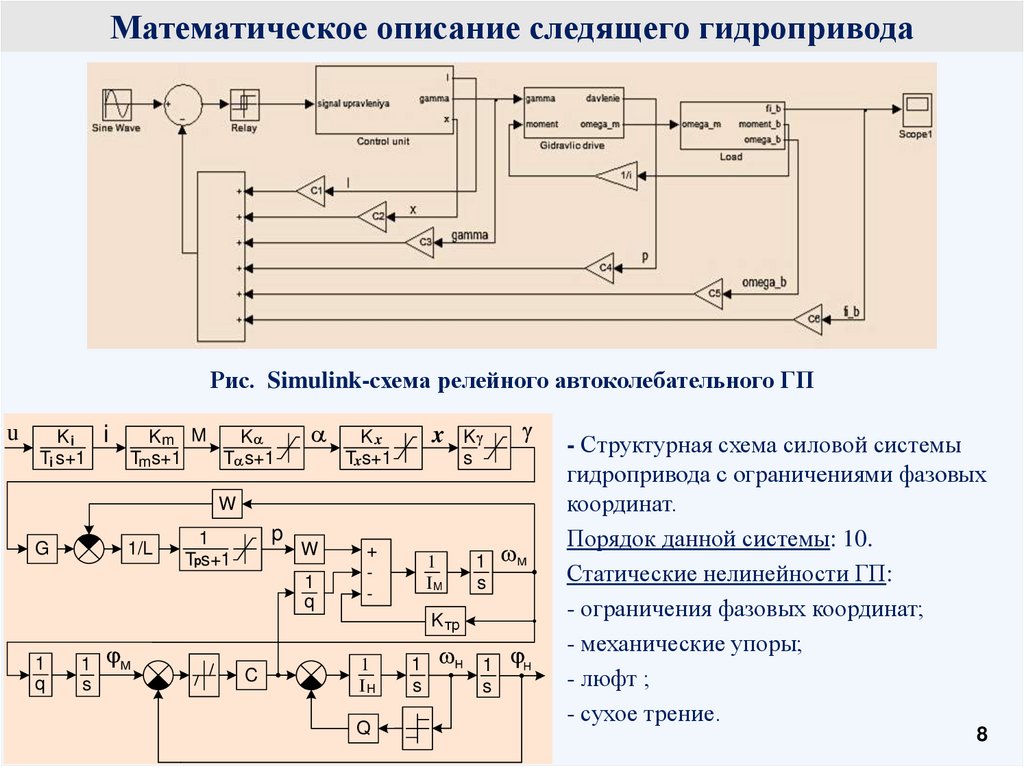
Математическое описание следящего гидроприводаРис. Simulink-схема релейного автоколебательного ГП
u
Ki
Ti s+1
i
Km M
K
Tms+1
T s+1
Kx
Txs+1
x
K
s
1
IM
1
s
W
G
1/L
p
1
Tps+1
W
1
q
+
-
М
K тр
1
q
1
s
М
C
1
IH
Q
1
s
Н
1
s
Н
- Структурная схема силовой системы
гидропривода с ограничениями фазовых
координат.
Порядок данной системы: 10.
Статические нелинейности ГП:
- ограничения фазовых координат;
- механические упоры;
- люфт ;
- сухое трение.
8
8
9.
Математические описания (МО) сопоставляемых следящих приводовс устройствами защит от перегрузок
МО гидропривода
МО электропривода
d p E
di 1
);
w
)
p
Ф(
p
)
C
C
(
e
K
(
д
п
у
н
dt
dt L (U e iR кк (i ) Ce );
W
1
d
d 1 (C i h M );
( wд p h M );
M
C
dt
J
dt
J
d
d
;
dt ;
dt
e K U ;
е
му
U e U BX K1 K 2 K 3 i;
U A sin t ;
U U BX K 2 K 2 K 3 p;
BX
BX
BX
BX ABX sin BX t ,
при t 0 p(0) pH ; (0) H ; (0) H ;
при t 0 i (0) iH ; (0) H ; (0) H ;
Здесь
Здесь
МО
МО
устройства
bкк при p Pкк устройства
U кк при i iкк ;
ограничения
Ф( p ) 0 при | p | Pкк ограничения
тока якоря
кк (i ) 0 при i iкк ;
перепада
b при p P
U при i i ; (построенного
давлений в ГП
кк
кк
кк
кк по аналогии с
(клапанная
коробка)
клапанной
коробкой ГП)9
10.
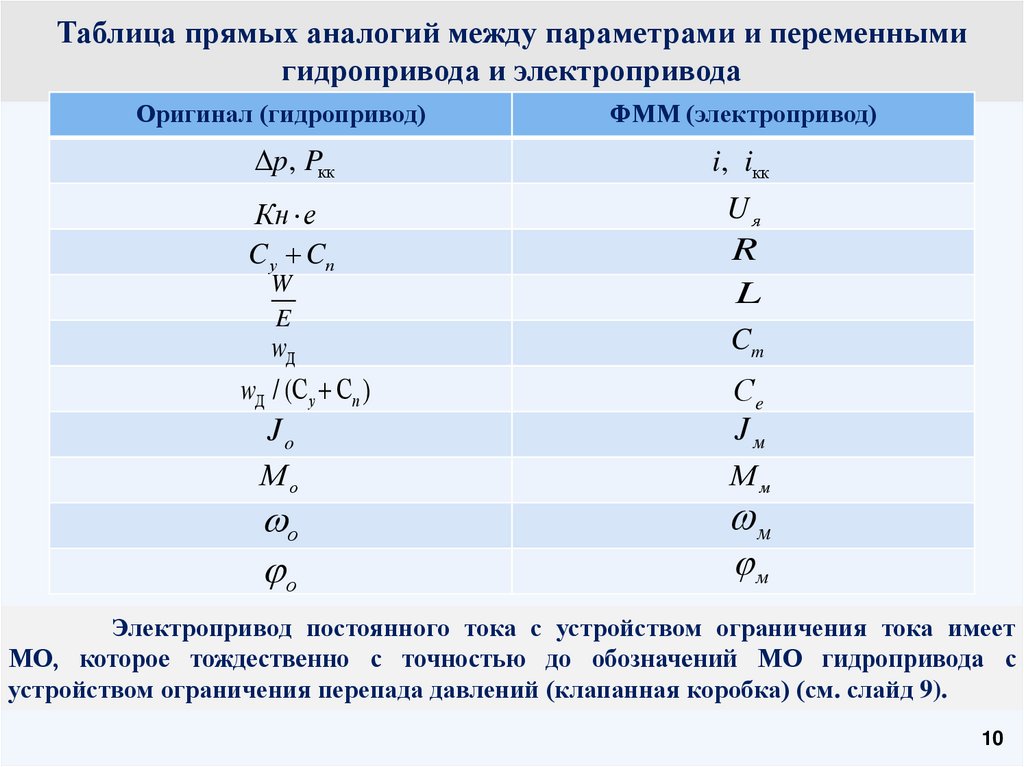
Таблица прямых аналогий между параметрами и переменнымигидропривода и электропривода
Оригинал (гидропривод)
ФММ (электропривод)
p, Pкк
i, iкк
Кн e
C у Cп
Uя
R
L
Cm
W
E
wД
wД / (С у Сп )
Jo
Сe
Jм
Мо
Мм
о
о
м
м
Электропривод постоянного тока с устройством ограничения тока имеет
МО, которое тождественно с точностью до обозначений МО гидропривода с
устройством ограничения перепада давлений (клапанная коробка) (см. слайд 9).
10
11.
Анализ подобия функционирования силовых системФормирование критериев подобия сопоставляемых силовых систем:
1) критерии подобия электромеханической системы:
2) критерии подобия гидравлической системы:
Условия подобия силовых систем:
j idem, где j 1, 2,...8
Выполнение полученных условий подобия обеспечивает масштабное подобие
процессов в сопоставляемых электромеханической и гидравлической силовых
системах.
11
12.
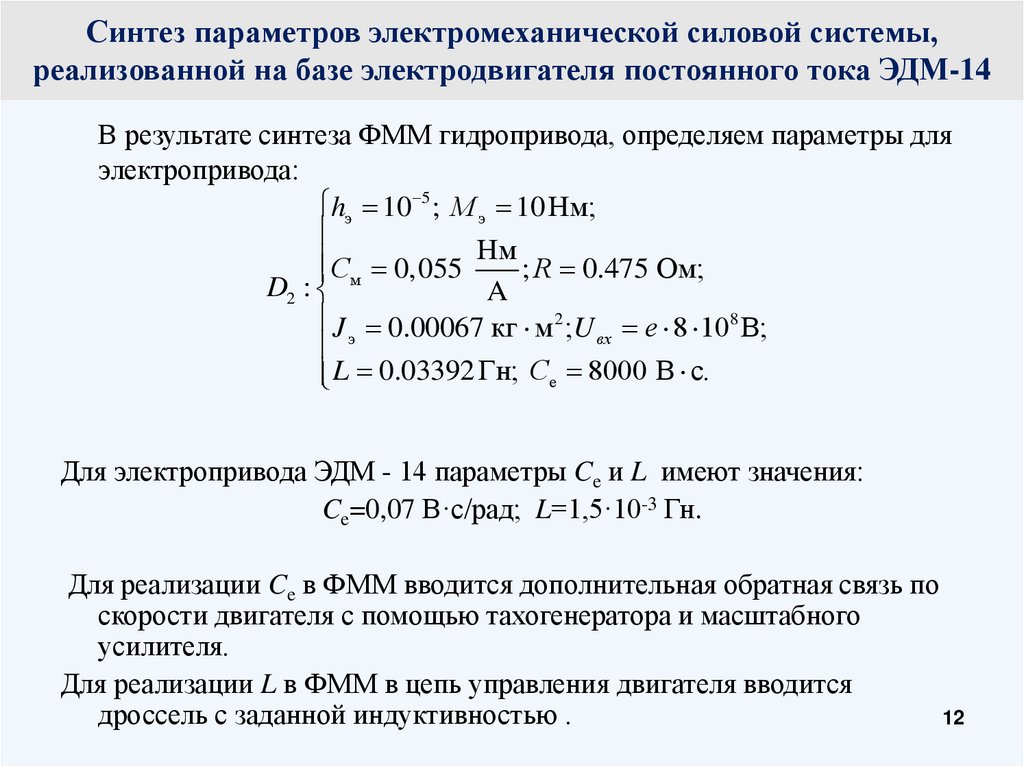
Синтез параметров электромеханической силовой системы,реализованной на базе электродвигателя постоянного тока ЭДМ-14
В результате синтеза ФММ гидропривода, определяем параметры для
электропривода:
hэ 10 5 ; М э 10 Нм;
Нм
С
0,055
; R 0.475 Ом;
м
D2 :
A
J 0.00067 кг м 2 ;U е 8 108 В;
вх
э
L 0.03392 Гн; Се 8000 В с.
Для электропривода ЭДМ - 14 параметры Ce и L имеют значения:
Ce=0,07 В·с/рад; L=1,5·10-3 Гн.
Для реализации Ce в ФММ вводится дополнительная обратная связь по
скорости двигателя с помощью тахогенератора и масштабного
усилителя.
Для реализации L в ФММ в цепь управления двигателя вводится
дроссель с заданной индуктивностью .
12
13.
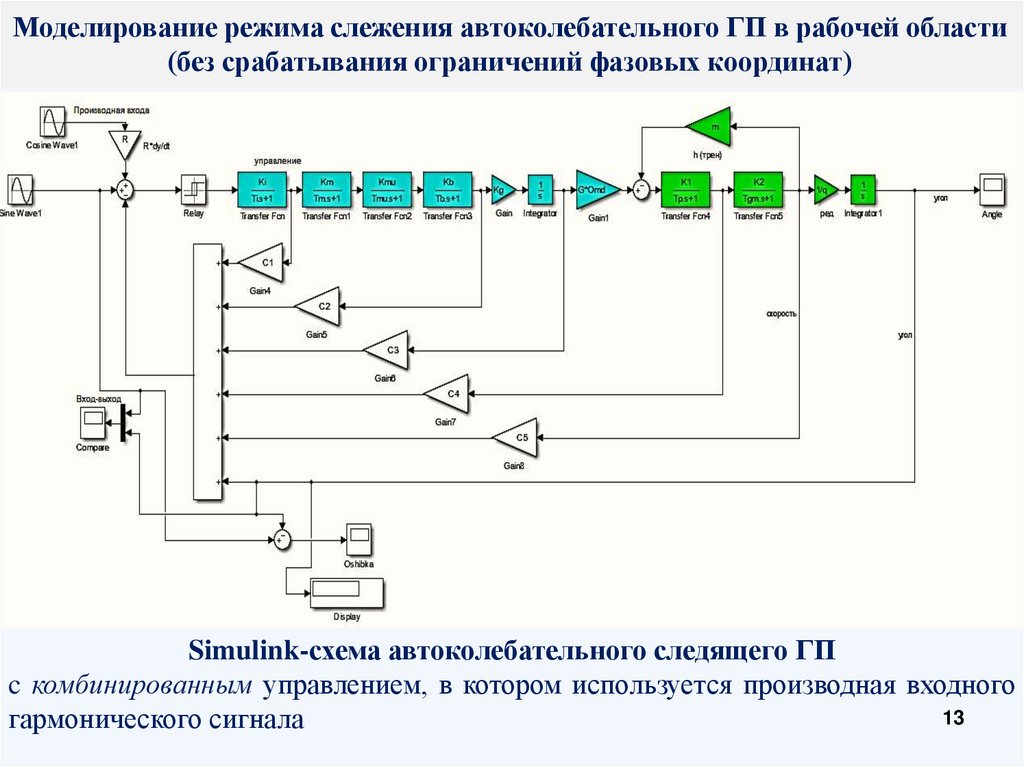
Моделирование режима слежения автоколебательного ГП в рабочей области(без срабатывания ограничений фазовых координат)
Simulink-схема автоколебательного следящего ГП
c комбинированным управлением, в котором используется производная входного
13
гармонического сигнала
14.
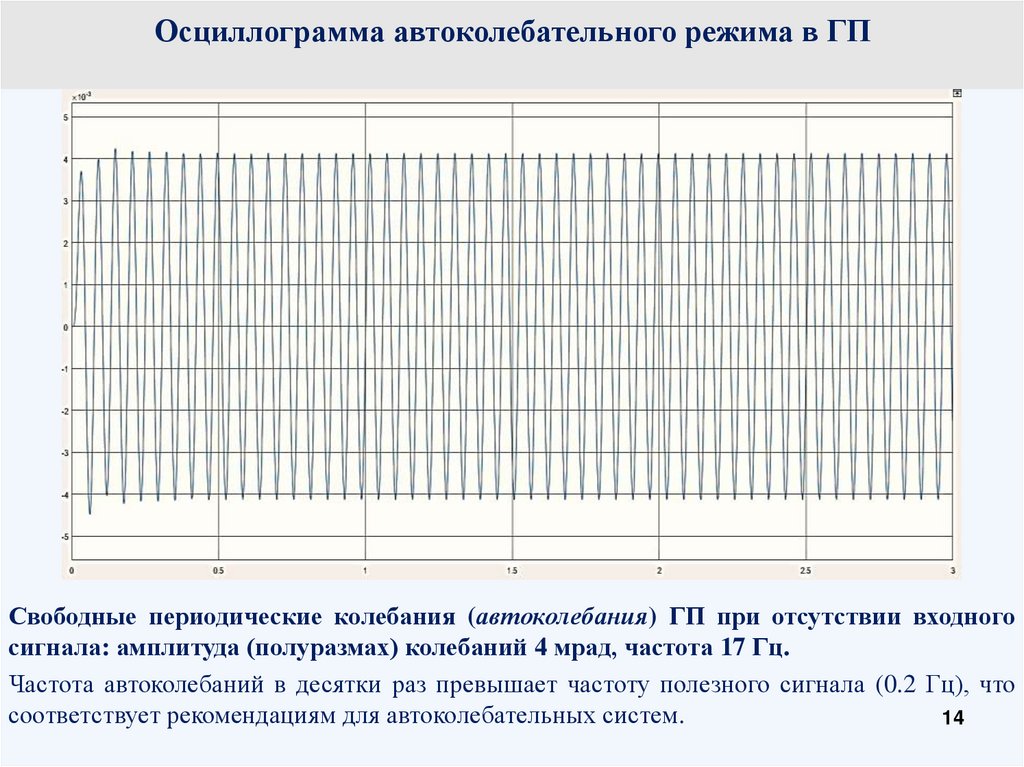
Осциллограмма автоколебательного режима в ГПСвободные периодические колебания (автоколебания) ГП при отсутствии входного
сигнала: амплитуда (полуразмах) колебаний 4 мрад, частота 17 Гц.
Частота автоколебаний в десятки раз превышает частоту полезного сигнала (0.2 Гц), что
соответствует рекомендациям для автоколебательных систем.
14
15.
Исследование точности режима слежения в ГПРежим отработки эквивалентного гармонического сигнала 1*sin(1.26*t).
Осциллограммы входного и выходного сигналов совпадают при наложении
15
16.
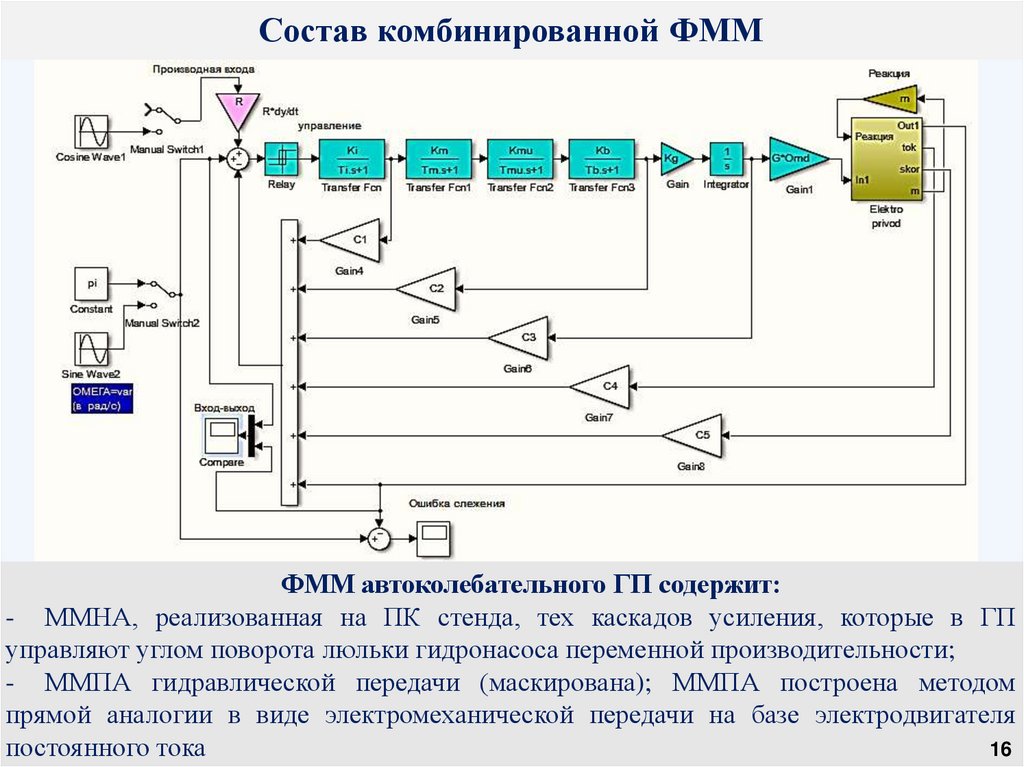
Состав комбинированной ФММФММ автоколебательного ГП содержит:
- ММНА, реализованная на ПК стенда, тех каскадов усиления, которые в ГП
управляют углом поворота люльки гидронасоса переменной производительности;
- ММПА гидравлической передачи (маскирована); ММПА построена методом
прямой аналогии в виде электромеханической передачи на базе электродвигателя
постоянного тока
16
17.
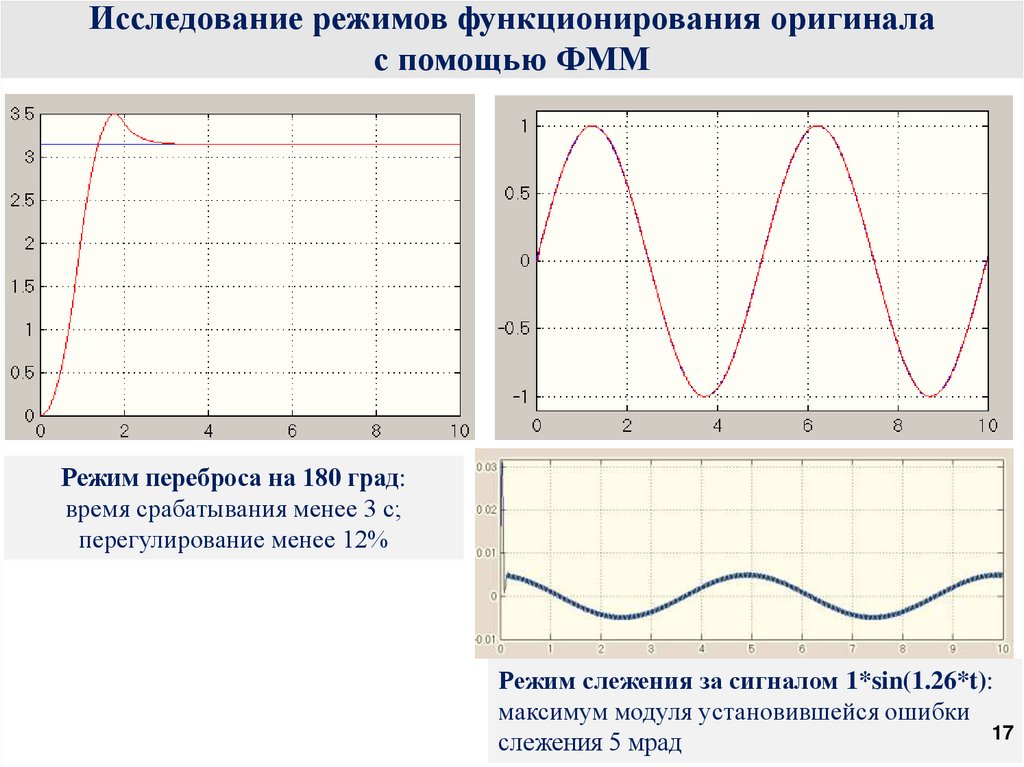
Исследование режимов функционирования оригиналас помощью ФММ
Режим переброса на 180 град:
время срабатывания менее 3 с;
перегулирование менее 12%
Режим слежения за сигналом 1*sin(1.26*t):
максимум модуля установившейся ошибки
17
слежения 5 мрад
18.
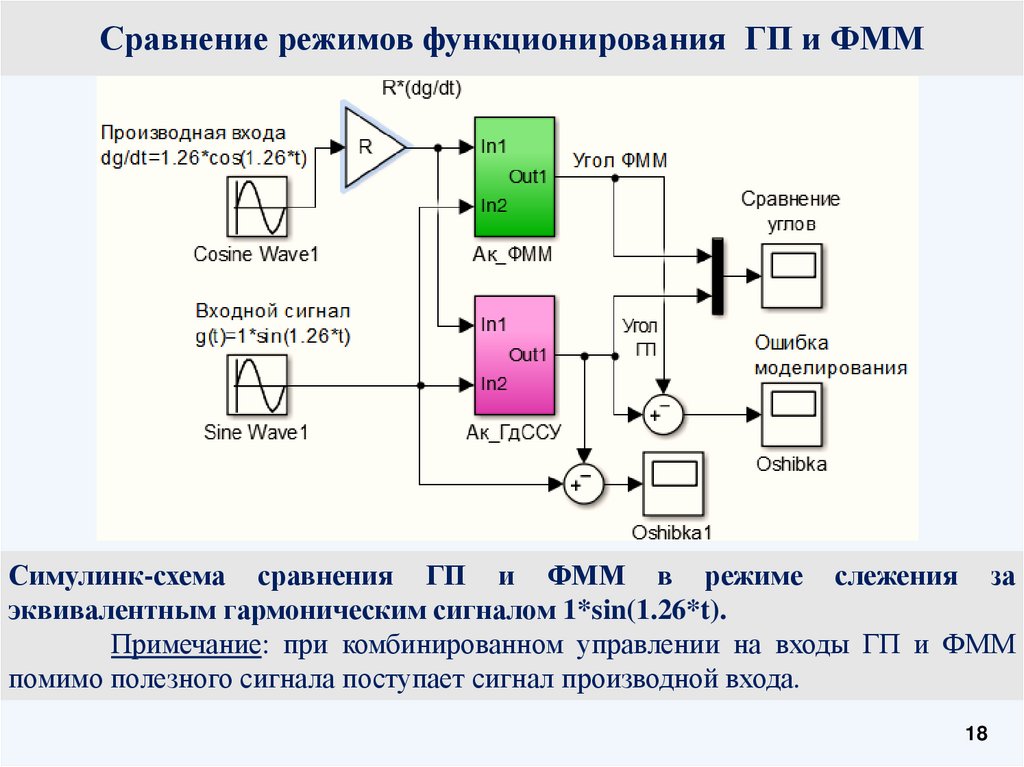
Сравнение режимов функционирования ГП и ФММСимулинк-схема сравнения ГП и ФММ в режиме слежения за
эквивалентным гармоническим сигналом 1*sin(1.26*t).
Примечание: при комбинированном управлении на входы ГП и ФММ
помимо полезного сигнала поступает сигнал производной входа.
18
19.
Сравнение осциллограмм отработки ГП и ФММэквивалентного гармонического входного сигнала
Выходной сигнал
при входном сигнале
1w1.26t
Сопоставление осциллограмм ГП и ФММ в режимах слежения за
эквивалентным гармоническим сигналом 1*sin(1.26*t):
имеет место конгруэнтность графиков при наложении
19
20.
Оценка ошибки физико-математического моделированияавтоколебательного гидропривода
Осциллограмма ошибка физико-математического моделирования ГП при
отработке гармонического сигнала 1*sin(1.26*t)
20
21.
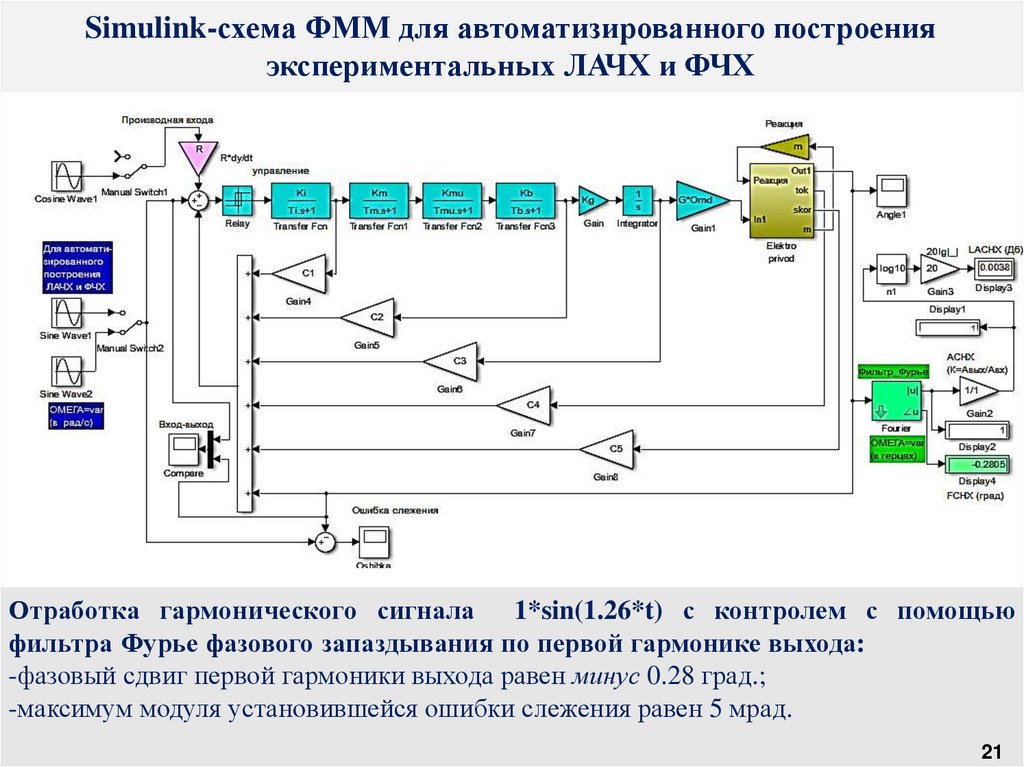
Simulink-схема ФММ для автоматизированного построенияэкспериментальных ЛАЧХ и ФЧХ
Отработка гармонического сигнала 1*sin(1.26*t) с контролем с помощью
фильтра Фурье фазового запаздывания по первой гармонике выхода:
-фазовый сдвиг первой гармоники выхода равен минус 0.28 град.;
-максимум модуля установившейся ошибки слежения равен 5 мрад.
21
21
22.
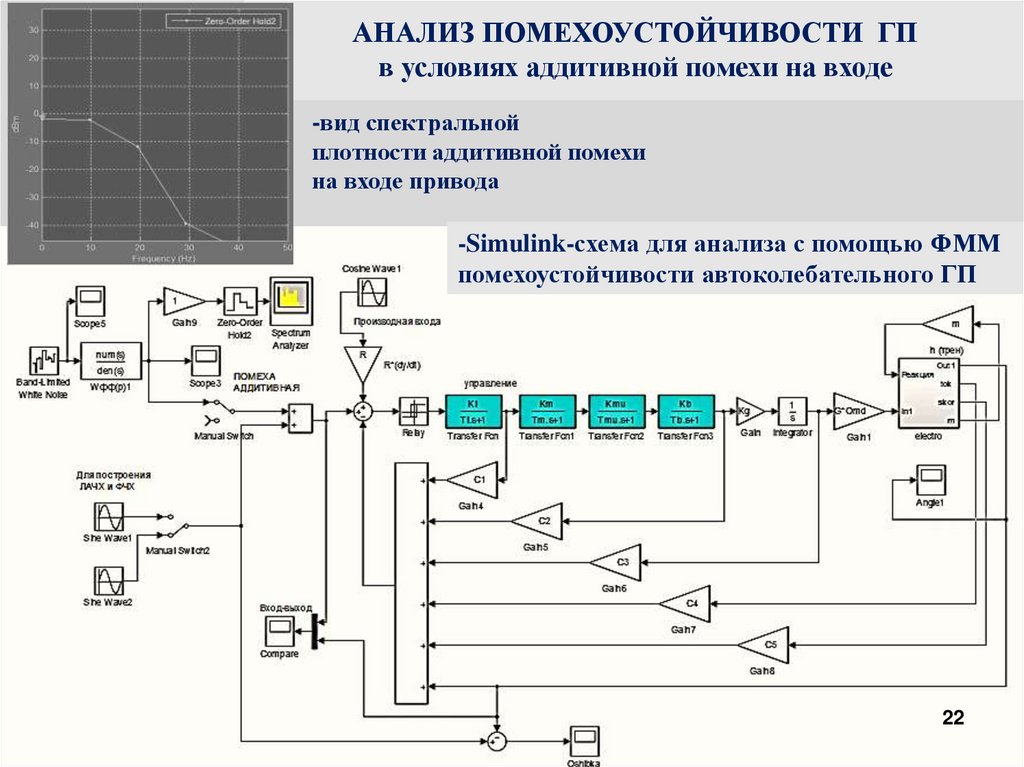
АНАЛИЗ ПОМЕХОУСТОЙЧИВОСТИ ГПв условиях аддитивной помехи на входе
-вид спектральной
плотности аддитивной помехи
на входе привода
-Simulink-схема для анализа с помощью ФММ
помехоустойчивости автоколебательного ГП
22
23.
Осциллограммы сигналов при оценке помехоустойчивости ГПРежим слежения без помехи
Режим слежения с помехой
Ошибка слежения без
помехи равна 5 мрад
Ошибка слежения с помехой
увеличилась до 10 мрад
23
24.
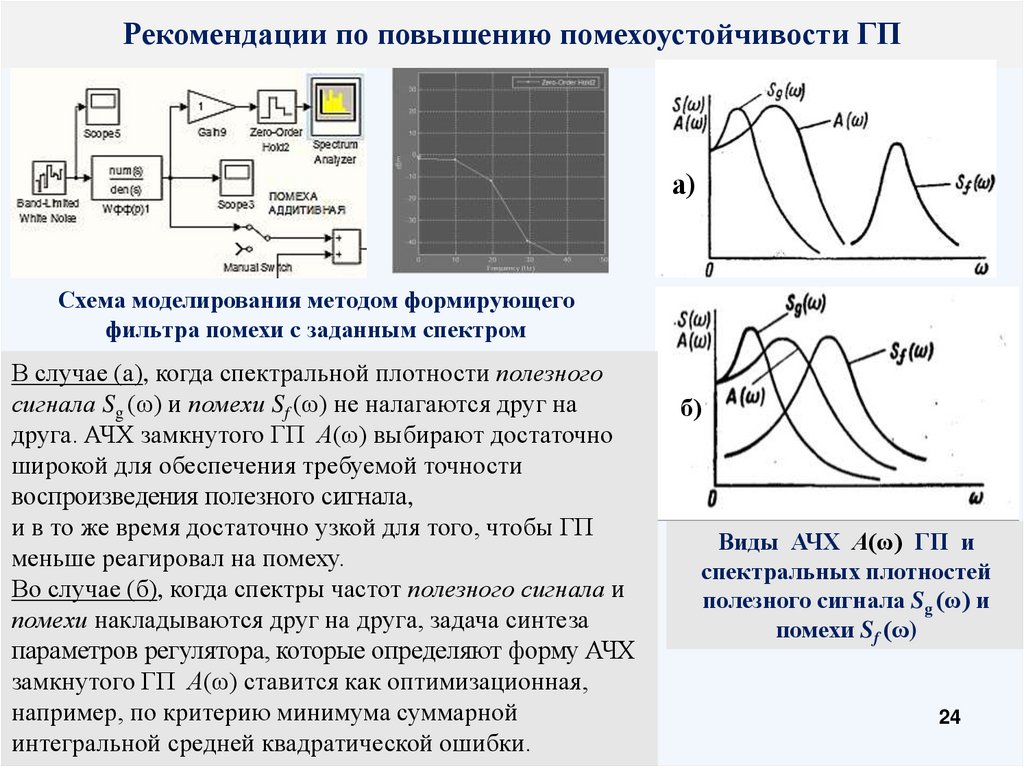
Рекомендации по повышению помехоустойчивости ГПа)
Схема моделирования методом формирующего
фильтра помехи с заданным спектром
В случае (а), когда спектральной плотности полезного
сигнала Sg (ω) и помехи Sf (ω) не налагаются друг на
друга. АЧХ замкнутого ГП А(ω) выбирают достаточно
широкой для обеспечения требуемой точности
воспроизведения полезного сигнала,
и в то же время достаточно узкой для того, чтобы ГП
меньше реагировал на помеху.
Во случае (б), когда спектры частот полезного сигнала и
помехи накладываются друг на друга, задача синтеза
параметров регулятора, которые определяют форму АЧХ
замкнутого ГП А(ω) ставится как оптимизационная,
например, по критерию минимума суммарной
интегральной средней квадратической ошибки.
б)
Виды АЧХ А(ω) ГП и
спектральных плотностей
полезного сигнала Sg (ω) и
помехи Sf (ω)
24
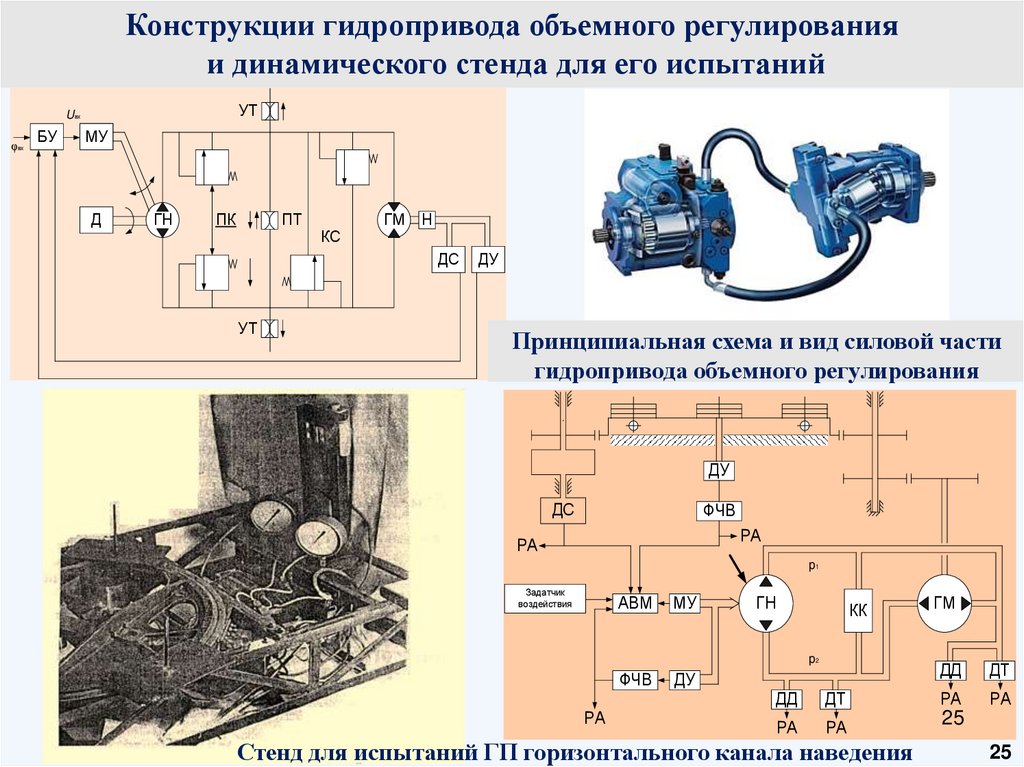
25.
Конструкции гидропривода объемного регулированияи динамического стенда для его испытаний
УТ
Uвх
φвх
БУ
МУ
Д
ГН
ПК
ПТ
КС
ГМ
Н
ДС
УТ
ДУ
Принципиальная схема и вид силовой части
гидропривода объемного регулирования
`
ДУ
ДС
ФЧВ
РА
РА
p1
Задатчик
воздействия
АВМ
МУ
ГН
КК
p2
ФЧВ
РА
ДУ
ГМ
ДД
ДТ
РА
ДД
ДТ
РА
РА
РА
25
Стенд для испытаний ГП горизонтального канала наведения
25
26.
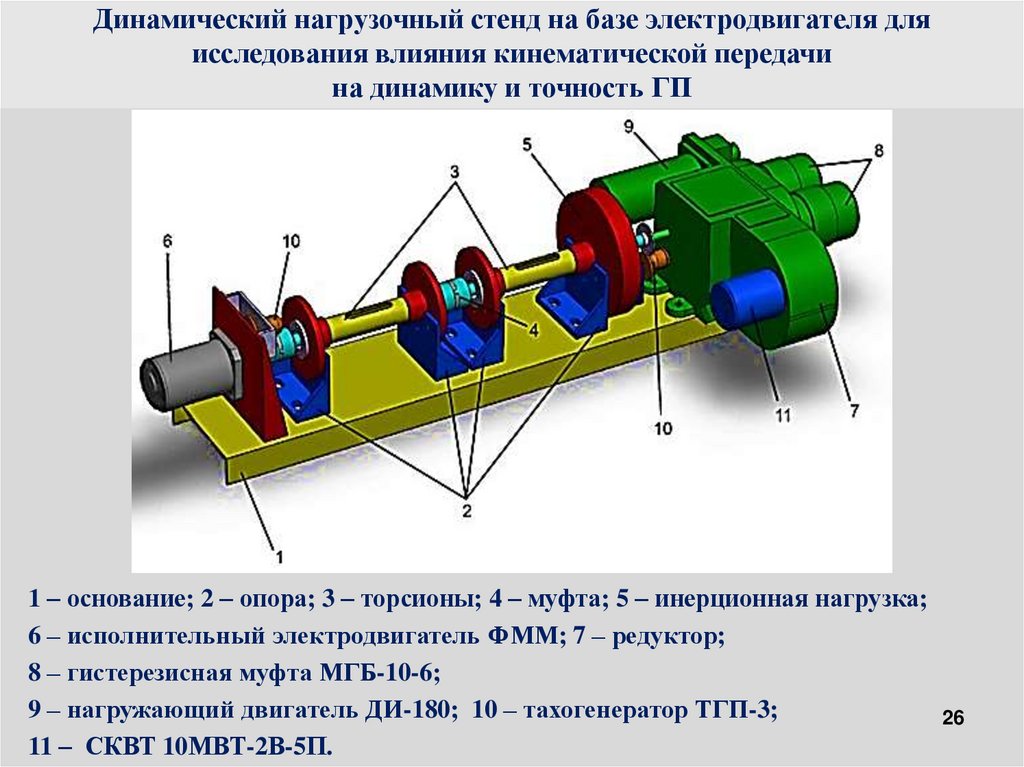
Динамический нагрузочный стенд на базе электродвигателя дляисследования влияния кинематической передачи
на динамику и точность ГП
1 – основание; 2 – опора; 3 – торсионы; 4 – муфта; 5 – инерционная нагрузка;
6 – исполнительный электродвигатель ФММ; 7 – редуктор;
8 – гистерезисная муфта МГБ-10-6;
9 – нагружающий двигатель ДИ-180; 10 – тахогенератор ТГП-3;
26
11 – СКВТ 10МВТ-2В-5П.
27.
Функциональная схема динамического нагрузочного стендаИД – исполнительный двигатель ФММ, УЭ – упругий элемент (торсион),
Р – редуктор, НУ – нагружающее устройство (блок гистерезисных муфт),
НД – нагружающий двигатель, БУП – блок управления приводом,
ТГ – тахогенератор, ДУ – датчик угла (СКВТ),
БУН – блок управления нагрузкой,
МПСУ – микропроцессорная система управления,
ПК – персональный компьютер.
27
28.
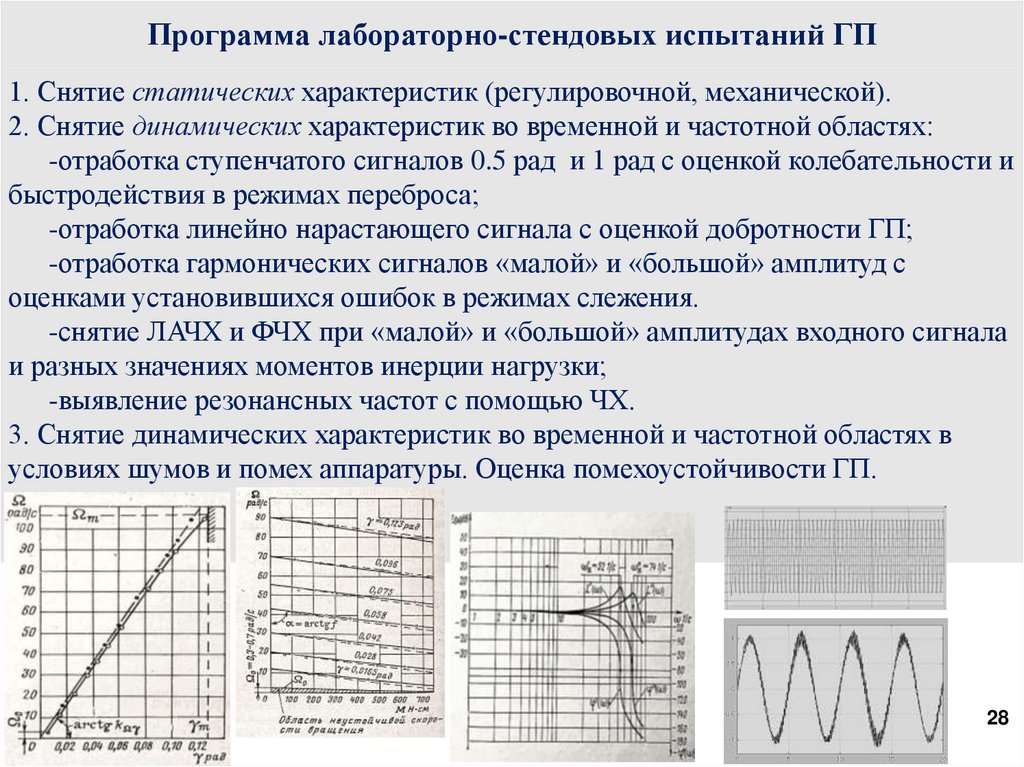
Программа лабораторно-стендовых испытаний ГП1. Снятие статических характеристик (регулировочной, механической).
2. Снятие динамических характеристик во временной и частотной областях:
-отработка ступенчатого сигналов 0.5 рад и 1 рад с оценкой колебательности и
быстродействия в режимах переброса;
-отработка линейно нарастающего сигнала с оценкой добротности ГП;
-отработка гармонических сигналов «малой» и «большой» амплитуд с
оценками установившихся ошибок в режимах слежения.
-снятие ЛАЧХ и ФЧХ при «малой» и «большой» амплитудах входного сигнала
и разных значениях моментов инерции нагрузки;
-выявление резонансных частот с помощью ЧХ.
3. Снятие динамических характеристик во временной и частотной областях в
условиях шумов и помех аппаратуры. Оценка помехоустойчивости ГП.
28
29.
Статические характеристики ГПв установившемся режиме работы
Регулировочная характеристика
– зависимость установившейся скорости
ненагруженного ГП от параметра
регулирования (угла поворота люльки γ)
Эта характеристика показывает:
• коэффициент усиления по скорости