















 задачи динамики точки")
.")
.")
.")




 Физика
Физика Механика
МеханикаПохожие презентации:

")








Динамика материальной точки. (Лекция 1)
1.
Новосибирский Государственный Архитектурно-СтроительныйУниверситет (Сибстрин)
ЛЕКЦИИ ПО ТЕОРЕТИЧЕСКОЙ МЕХАНИКЕ.
ДИНАМИКА
ЛЕКЦИЯ 1.
ДИНАМИКА МАТЕРИАЛЬНОЙ
ТОЧКИ
Кафедра теоретической механики
2. План лекции
1. Введение. Предмет и задачи динамики.2. Дифференциальные уравнения движения
материальной точки.
3. Решение прямой задачи динамики.
4. Рекомендации к решению обратной (и
смешанной) задачи.
5. Примеры
Заключение
3. Цель лекции
Познакомиться с основнымизаконами динамики
материальной точки и
методами решения задач
динамики точки.
4. Вспомним, что мы уже изучили:
Теоретическая механика – изучает движение тел приих взаимодействии.
Единственная мера взаимодействия – сила.
Три раздела курса – статика, кинематика, динамика.
Статика – изучает частный случай движения –
равновесие. Основной результат:
Тело в равновесии Fk 0, M O ( Fk ) 0
Если эти уравнения не выполняются – тело будет
двигаться!
Кинематика – изучает движение тел без учета сил – т.е.
закон движения тела, траекторию, скорость, ускорение
отдельных точек , связи между ними.
5. Предмет и задачи динамики
Динамика – изучает движение тел под действием сил.Силы будем считать зависящими от времени, от
положения точек, от скоростей точек.
Две основные задачи динамики:
1. По заданному закону движения определить силы
(эта задача уже решена была в кинематике!)
2.По заданным силам определить закон движения (для
ее решения еще нужно задать массу и дополнительные условия, например, положение и скорости точек в
начальный момент времени).
Замечание. Есть еще одна задача – “смешанная”. В ней
заданы часть сил и часть закона движения. Требуется
найти остальное (например: задана линия движения
точки и активные силы, найти силы реакции и закон
движения по линии)
6. Предмет и задачи динамики
При решении этих задач мы будем опираться настатику и кинематику. А именно:
-применять принцип отвердевания
-пользоваться способами приведения сил
-применять методы задания движения тел
-использовать связи между скоростями и ускорениями
отдельных точек.
Также как и в статике и в кинематике, начнем изучать
динамику с движения точки.
Напомним: Материальная точка – тело конечной
массы, размерами которого пренебрегаем.
7. Законы Галилея-Ньютона
I Закон Ньютона (закон инерции Галилея)Если на материальную точку не действуют
никакие силы, то эта точка или находится в
покое, или движется прямолинейно и
равномерно.
Движение материальной точки в различных
системах отсчета происходит по-разному.
Системы отсчета, в которых справедлив I
закон Ньютона называются
ИНЕРЦИАЛЬНЫМИ.
8.
Законы НьютонаII Закон Ньютона
Сила, действующая на материальную точку,
сообщает ей ускорение, которое в инерциальной
системе отсчета пропорционально величине
силы и имеет направление силы.
Основное уравнение динамики:
где m (масса) – мера
F ma
инертности точки
m const
9.
Законы НьютонаIII Закон Ньютона
Силы, с которыми действуют друг на друга две
материальные точки, всегда равны по модулю,
лежат на одной прямой и направлены в
противоположные стороны.
F
1
F
2
F F
10.
Принцип независимости действия силЕсли на материальную точку действуют
несколько сил, то ускорение точки
складывается из тех ускорений, которые имела
бы точка под действием каждой из этих сил в
отдельности.
- силы, действующие на
F1 , F2 ,..., Fn материальную точку
Основное Уравнение Динамики:
равнодействующая
F Fk
ma F
всех сил
11.
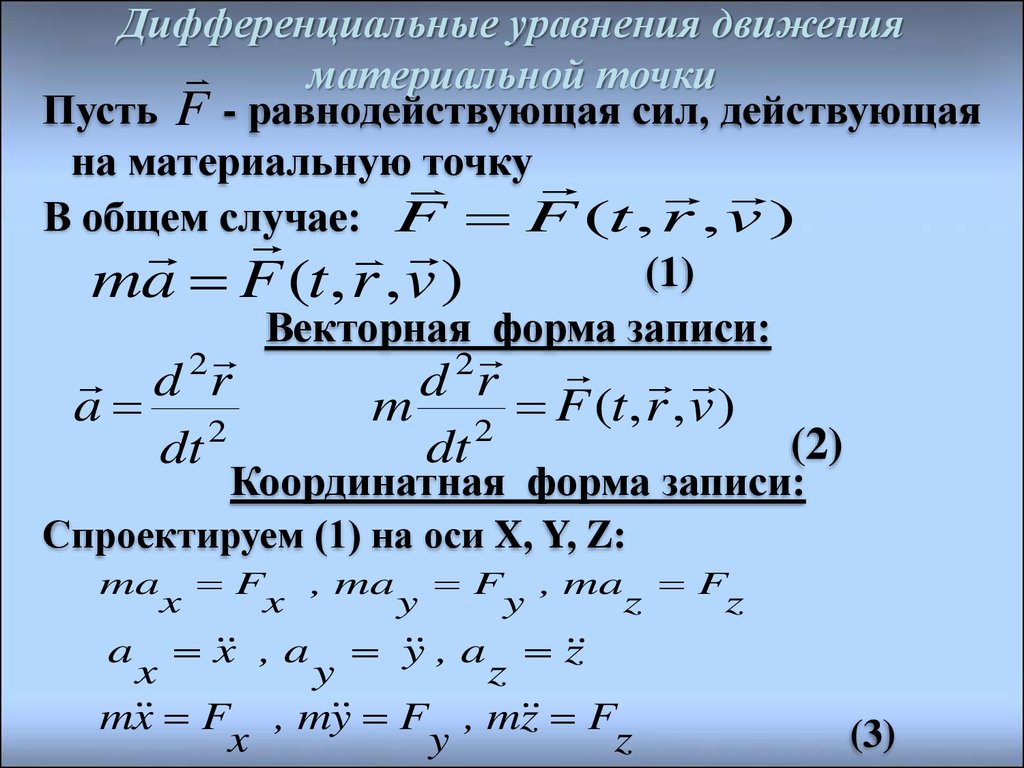
Дифференциальные уравнения движенияматериальной точки
Пусть F - равнодействующая сил, действующая
на материальную
точку
В общем случае:
F F (t , r , v )
(1)
ma F (t, r , v )
Векторная форма записи:
2
2
d r
m 2 F (t, r , v )
dt
d r
a 2
dt
(2)
Координатная форма записи:
Спроектируем (1) на оси X, Y, Z:
ma
a
x
x
F , ma F , ma F
x
y
y
z
z
x , a
y
y , a
z
z
m x F , m y F , m z F
x
y
z
(3)
12.
Дифференциальные уравнения движенияматериальной точки
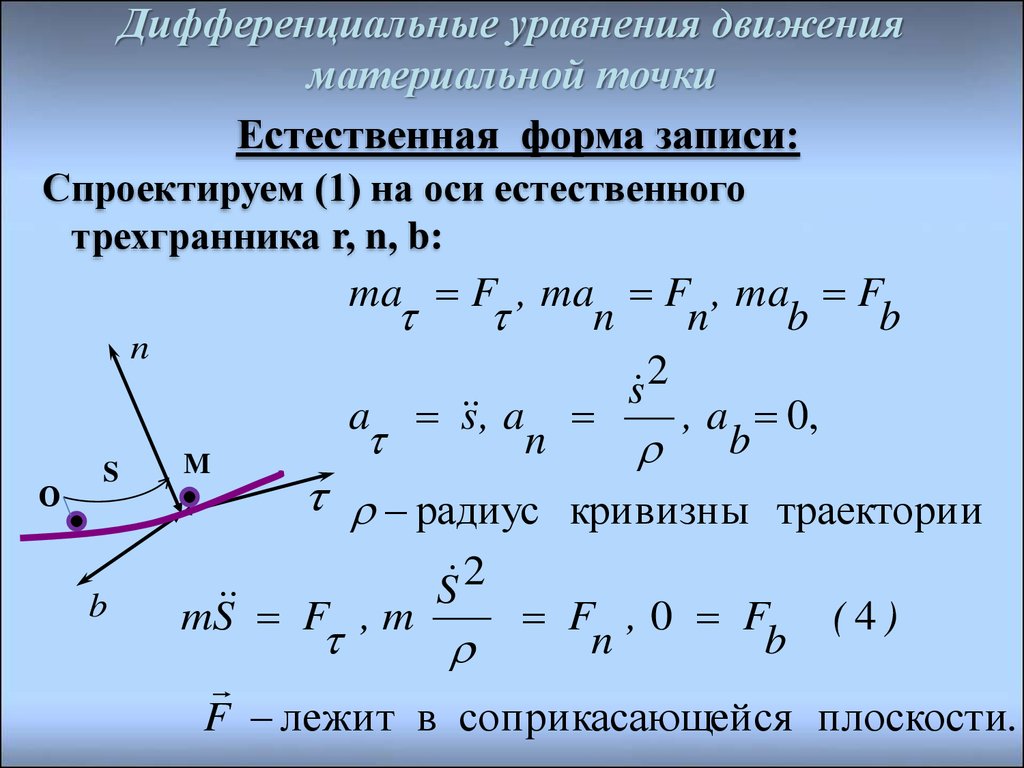
Естественная форма записи:
Спроектируем (1) на оси естественного
трехгранника r, n, b:
ma F , ma F , ma F
n
n
b
b
s 2
a s , a
, a 0,
n
b
n
О
S
b
M
радиус кривизны траектории
mS F , m
S 2
F ,0 F
n
b
(4)
F лежит в соприкасающейся плоскости.
13.
Решение первой (прямой) задачи динамикиУсловие задачи:
Движение точки задано. Требуется найти силу,
под действием которой происходит движение.
Решение задачи:
Сводится к подстановке закона движения в
уравнения (1), (3) или (4).
14. Пример
Точка массой m движется в плоскости х,у позакону х=2sin((π/6)t), у=2cos((π/6)t). Найти
силу, под действием которой происходит
это движение.
x
2
18
sin(
6
t ),
y
Подставляем (5) в (3)
2
18
cos(
t ) (5)
6
y
M
m
Fx
sin( t ),
18
6
m 2
Fy
cos( t )
18
6
2
F
x
О
Модуль силы: F Fx Fy
2
-2
m
const
18
2
2
2
15.
Решение второй (обратной) задачи динамикиИзвестна сила, действующая на материальную
точку. Требуется найти закон движения точки.
F F (t, r , v )
Подставляем F в (3).
Получим систему трех дифференциальных
уравнений:
m x Fx (t, x, y,z, x , y , z )
m y Fy (t, x, y,z, x , y , z )
(6)
m z Fz (t, x, y,z, x , y , z )
16.
Общее решение системы (6)x x (t, C1, . ,C6 )
y y (t, C1, . ,C6 )
(7)
z z (t, C1, . ,C6 )
Постоянные С1, …. , С6 находятся из
дополнительных (например,начальных
условий)
В качестве начальных условий следует
зафиксировать положение и скорость
материальной точки в начальный момент
времени.
17.
При t = 0x x0 , y y0 , z z0
x x 0 , y y 0 , z z 0
(8)
Подчиняя (7) условиям (8), находим С1, …. , С6 и
определяем закон движения материальной
точки
18.
ПримерСамолет летит на высоте 400м со скоростью 200
м/с. Найти закон движения груза, сброшенного с
самолета. Сопротивлением воздуха пренебречь.
Считаем груз материальной точкой
m x 0,
x 0,
y
V0
mg
x C1t C3
x C1 ,
х
m y mg
y g
gt C2
y
t2
y g
C2 t C4
2
19.
Начальные условияПри t = 0
x 0,
x 200,
C1 200
C2 0
y 400
y 0
C3 0
Закон движения груза:
x 200 t
2
t
y g
400
2
C4 400
20.
Прямолинейное движение материальнойточки
Точка будет совершать прямолинейное
движение, если действующая на неё сила
будет параллельна начальной скорости.
М0 V0
М
F
x
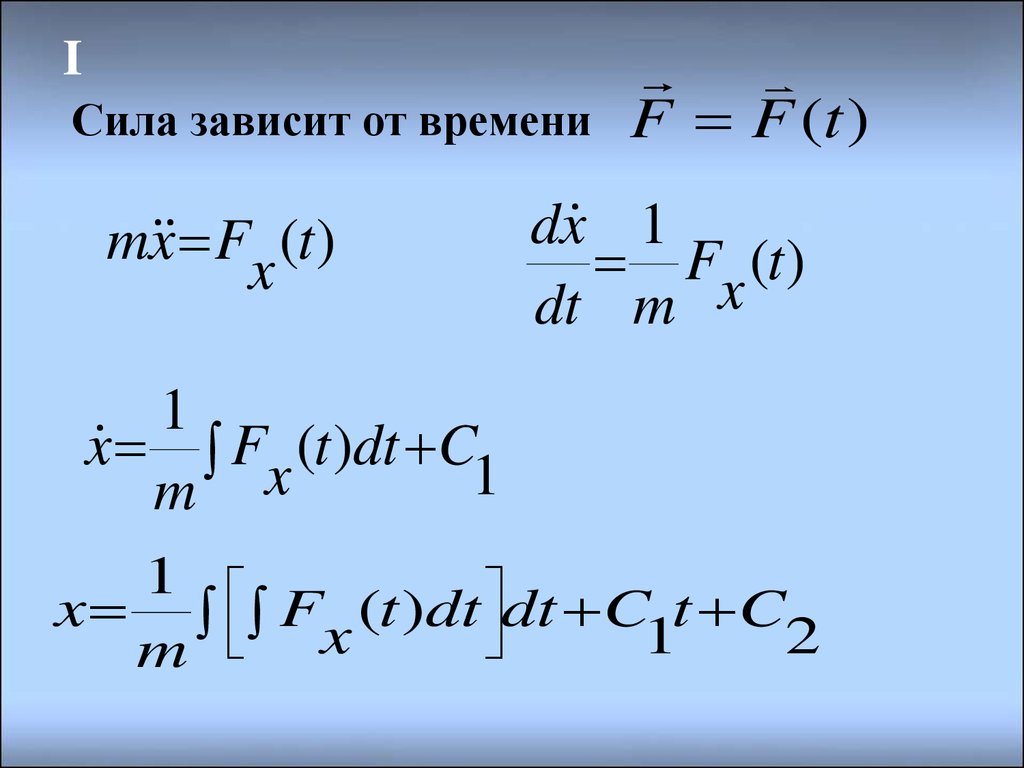
21.
IСила зависит от времени
m x F (t )
x
F F (t )
dx 1
F (t )
dt m x
1
x F (t )dt C
1
m x
1
x F (t )dt dt C t C
1
2
m x
22.
IIСила зависит от положения точки F F (x )
m x F (x)
x
dV
dV
dx
dV
x
V
dt dx dt
dx
1
VdV Fx ( x)dx
m
V
2
2
m
V
F
x
( x ) dx C1
2
Fx ( x)dx C1
m
23.
IIdx
2
dt
F
dx
C
,
x
1
dt
m
t
dx
2
Fx dx C1
m
t ( x, C1C2 )
x (t , C1C2 )
C2
dx
2
Fx dx C1
m
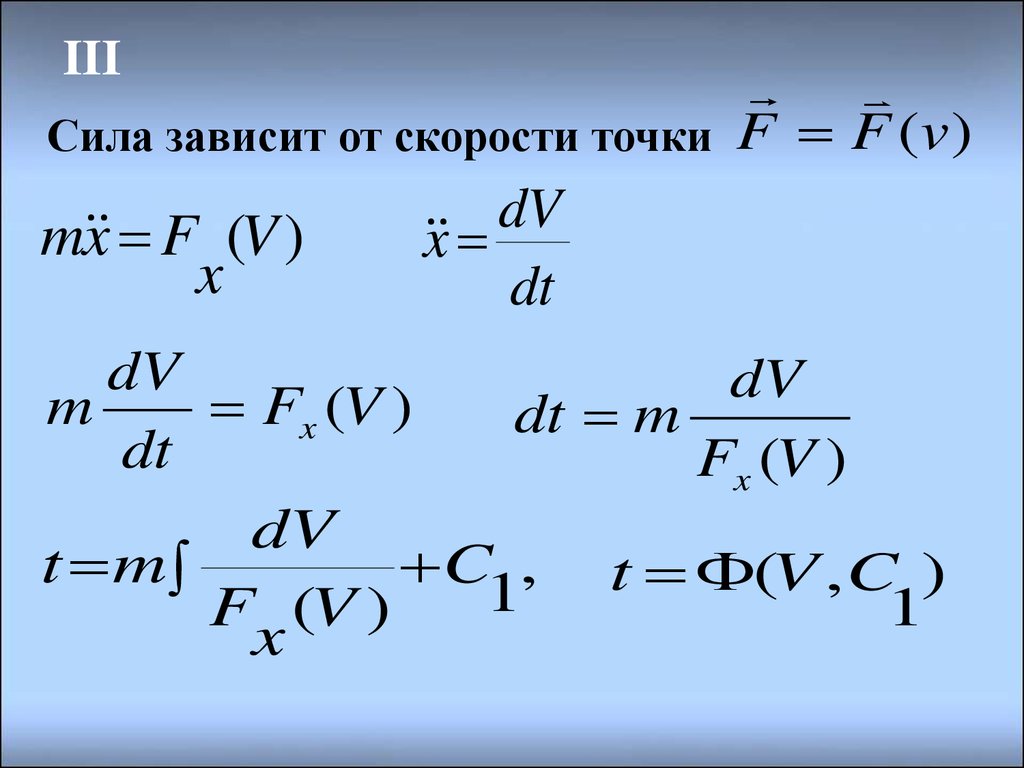
24.
IIIСила зависит от скорости точки F F (v )
dV
x
m x F (V )
x
dt
dV
dV
m
Fx (V )
dt m
dt
Fx (V )
dV
t m
C , t (V , C )
1
1
F (V )
x
25.
IIIV (t,C1)
dx
(t,C1)
dt
x (t , C1 )dt C2
Другой способ решения:
dV
x V
dx
mVdV
dx
Fx (V )
VdV
x m
C
1
F (V )
x
26.
IIIx (V ,C1)
V ( x, C )
1
dx
dx
dt
( x,C1)
( x,C1)
dt
dx
t
C ,
t f ( x,C1,C2 )
( x,C1) 2
x (t,C1,C2 )
27. Рекомендации к решению обратной (и смешанной) задачи динамики точки
1. Выбрать систему координат (удачно!)2. Изобразить все силы (активные и реакции связей),
действующие на точку.
3. Написать второй закон Ньютона в векторном виде,
спроецировать его на оси координат и получить ДУ.
4. Написать НУ(точнее дополнительные условия)
5. Решить ДУ с использованием НУ.
Замечания:
1. Полезен нулевой пункт: Прежде чем решать –
подумай!
2. Уместна пословица: Заставь дурака богу молиться –
он и лоб пробьет!
28. Пример (фантастический проект).
Для перевозки грузов из Н в L прорыт гладкий канал.Определить закон движения груза. Доедет ли груз
до L? Если да, то, за какое время ? С какой
скоростью приедет в L? Считаем, что в Н скорость
груза равна нулю.
N
l/2
x
Решение.
1. Начало отсчета поместим в Н,
H
L
α
M
а ось x направим в сторону L.
F
R
2. На груз будет действовать сила
C
притяжения Земли F, F mgr / R
и нормальная реакция N гладкого канала .
29. Пример (фантастический проект).
Nl/2
ma F N
x : m x F cos mgr cos / R
r cos l / 2 x
3.
x
H
L
α
F
M
R
C
ДУ : m x mg (l / 2 x) / R
Т.к. масса сокращается, то для любых грузов движение
одно и то же!!!
x(0) 0, x (0) 0
4. НУ:
5. x ( g / R) x gl / 2 R
x A cos( g / Rt ) B sin( g / Rt ) l / 2
x(0) 0, x (0) 0 0 A 1 B 0 l / 2;
0 A g / R 0 B g / R 1 0
A l / 2, B 0
30. Пример (фантастический проект).
x l (1 cos( g / Rt )) / 2N
l/2
x
H
L
α
F
Проанализируем решение.
M
R
C
Если cos( g / Rt ) 1 x l
груз до L доедет (!), причем за время t1 , определяемое
равенством cos( g / Rt1 ) 1 .Т.е. g / Rt1 , или
.
t1 R / g 3.14 6370 10 3 / 9.8 42 мин
Отметим что время не зависит от расстояния (что до
L, что до Омска время прибытия груза одно и то же!) .
Скорость, с которой груз доедет, будет равна
v1 x (t 1 ) l g / R cos( g / Rt1 ) 0
Причем, если груз не забрать в L, то он поедет обратно
в Н.
31. Заключение
1. Сформулированы основные задачи динамики точки– прямая, обратная и смешанная.
2. Приведены законы Галилея-Ньютона.
3. Выведены ДУ движения точки в прямоугольной
декартовой и естественной системах отсчета.
4. Даны рекомендации к решению обратной и
смешанной задачи.
5. Приведены примеры решения задач.
32. Вопросы для самоконтроля
1.2.
3.
4.
5.
6.
7.
8.
Что изучается в динамике?
Какие основные задачи динамики?
В чем суть закона инерции Галилея?
Какие системы отсчета называют
инерциальными, а какие неинерциальными?
Как связаны между собой две инерциальные
системы отсчета?
Почему систему отсчета, связанную с Землей в
большинстве случаев приближенно принимают
за инерциальную?
Сформулируйте условия, при которых
справедлив второй закон Ньютона?
В чем состоит принцип суперпозиции действия
сил на точку?
33. Вопросы для самоконтроля
9. Почему масса точки является мерой ее инерции?10. Как применять второй закон Ньютона, если
движение точки несвободно?
11. Для чего нужны дифференциальные уравнения
движения точки?
12. Сформулируйте прямую и обратную задачи
динамики точки? Все ли задачи динамики точки
сводятся к этим двум?
13. Перечислите основные этапы решения обратной
задачи динамики точки?
14. Для чего необходимо задавать начальные
(дополнительные) условия при решении
обратной задачи динамики точки? Сколько
таких условий требуется задавать?