 Математика
МатематикаПохожие презентации:





")




Рівняння руху гіроскопу в кардановому підвісі
1.
Лекція 6Рівняння руху
гіроскопу в кардановому
підвісі
2.
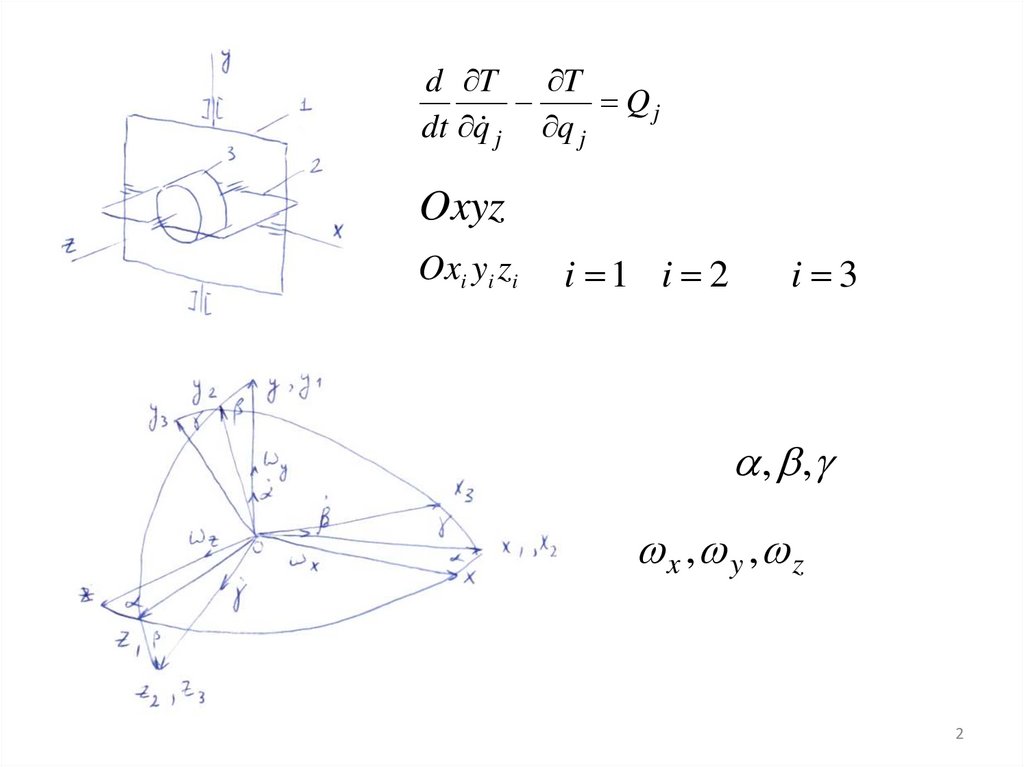
d T TQj
dt q j q j
Oxyz
Oxi yi zi
i 1 i 2
i 3
, ,
x , y , z
2
3.
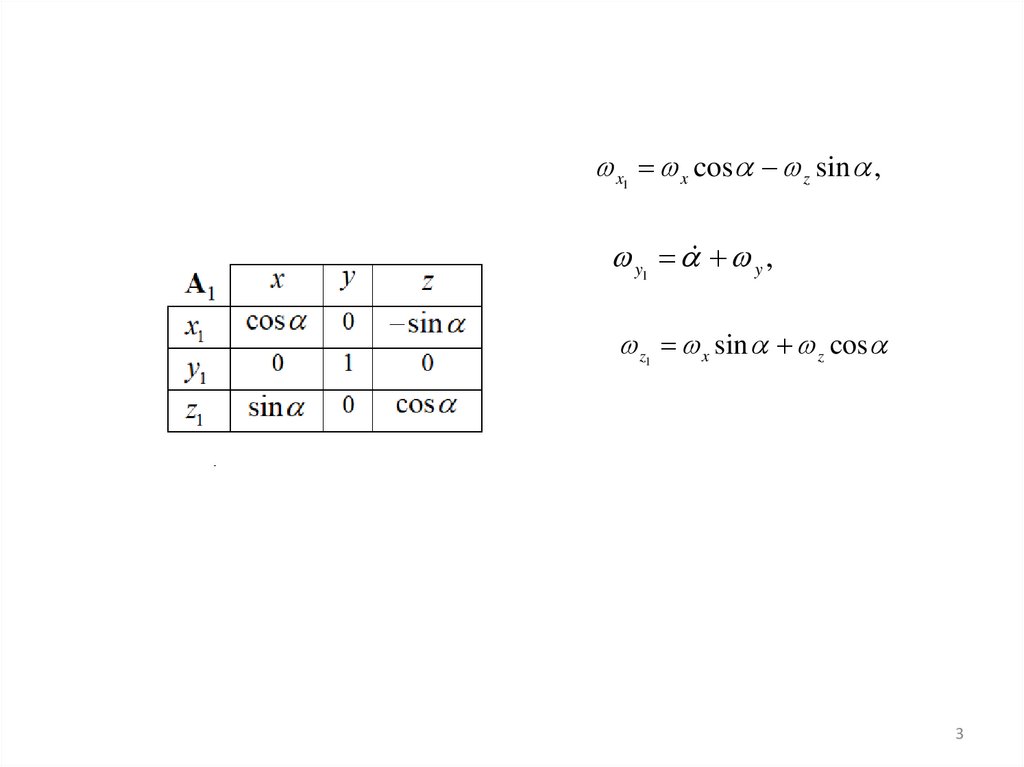
x x cos z sin ,1
y y ,
1
z x sin z cos
1
3
4.
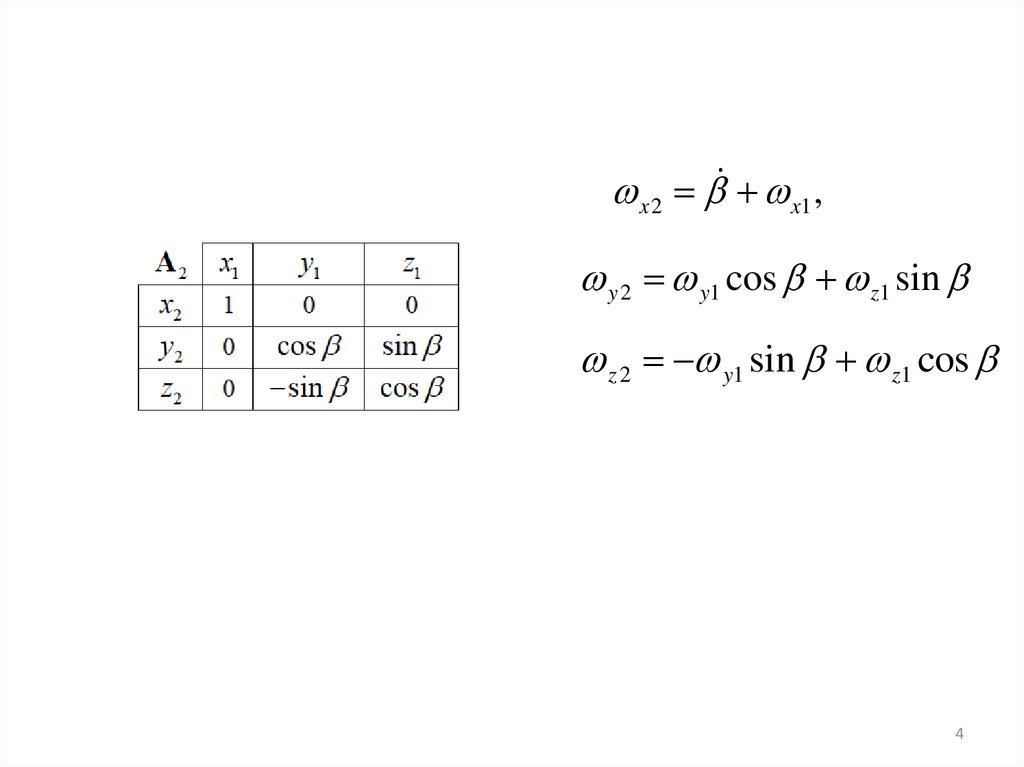
x 2 x1 ,y 2 y1 cos z1 sin
z 2 y1 sin z1 cos
4
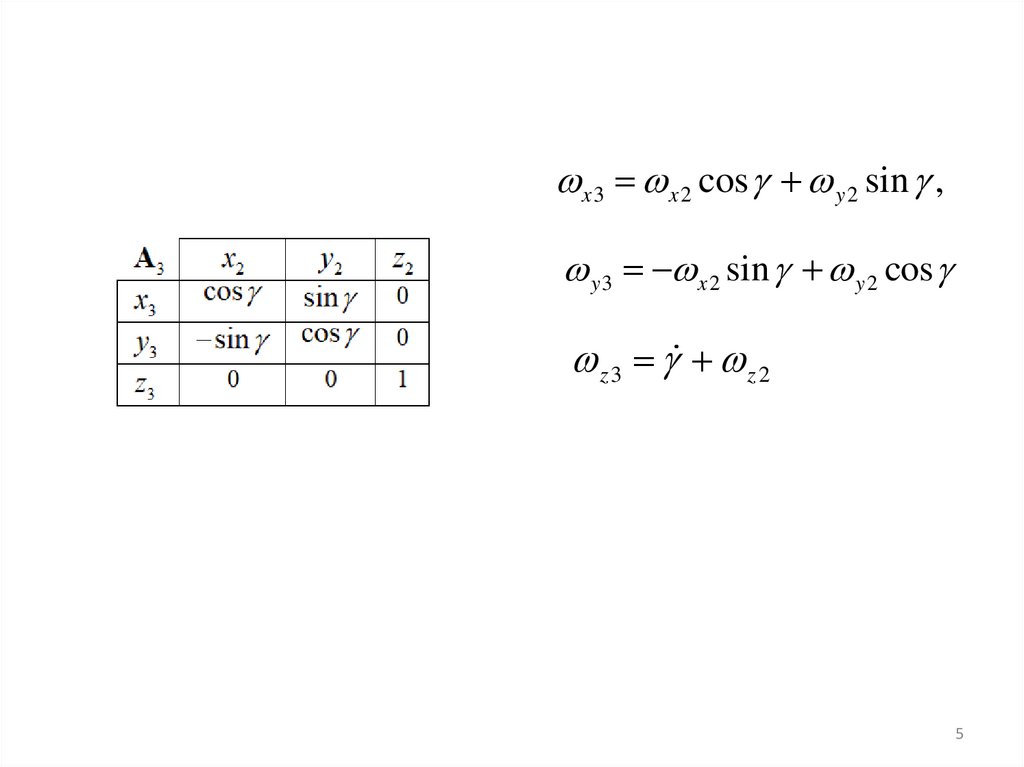
5.
x 3 x 2 cos y 2 sin ,y 3 x 2 sin y 2 cos
z 3 z 2
5
6.
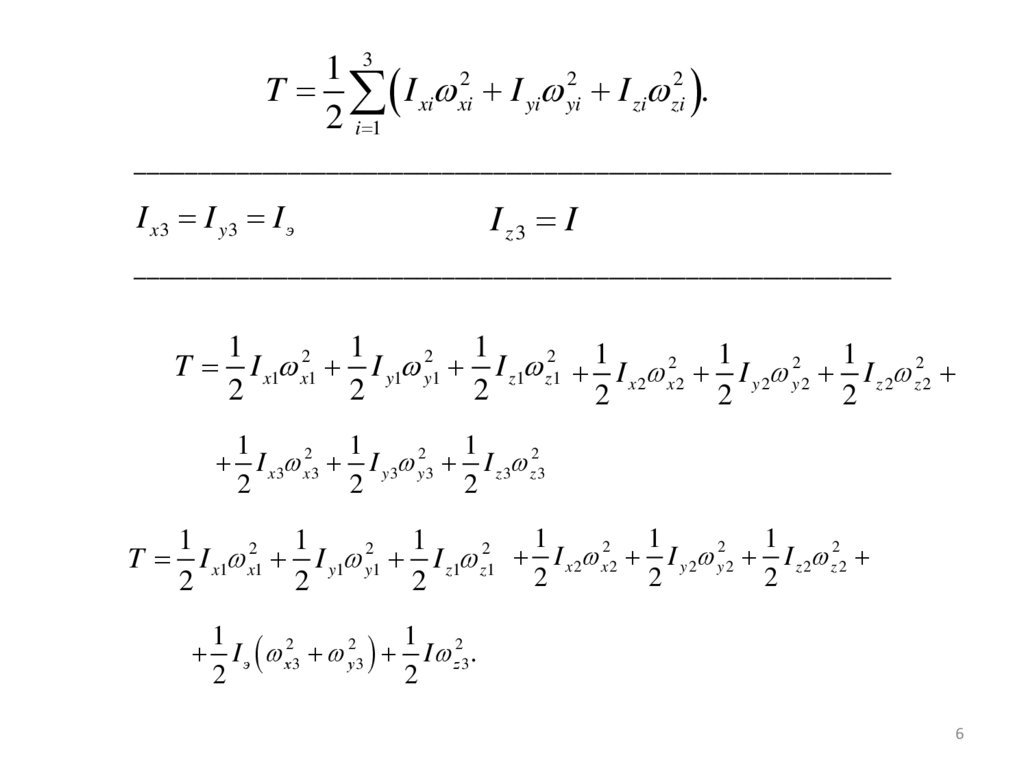
1 3T I xi xi2 I yi yi2 I zi zi2 .
2 i 1
___________________________________________________________
I x3 I y3 I э
I z3 I
___________________________________________________________
1
1
1
2
2
T I x1 x1 I y1 y1 I z1 z21 1 I x 2 x22 1 I y 2 y22 1 I z 2 z22
2
2
2
2
2
2
1
1
1
I x 3 x23 I y 3 y23 I z 3 z23
2
2
2
T
1
1
1
1
1
1
2
2
2
I x1 x21 I y1 y21 I z1 z21 I x 2 x 2 I y 2 y 2 I z 2 z 2
2
2
2
2
2
2
1
1
I э x23 y23 I z23 .
2
2
6
7.
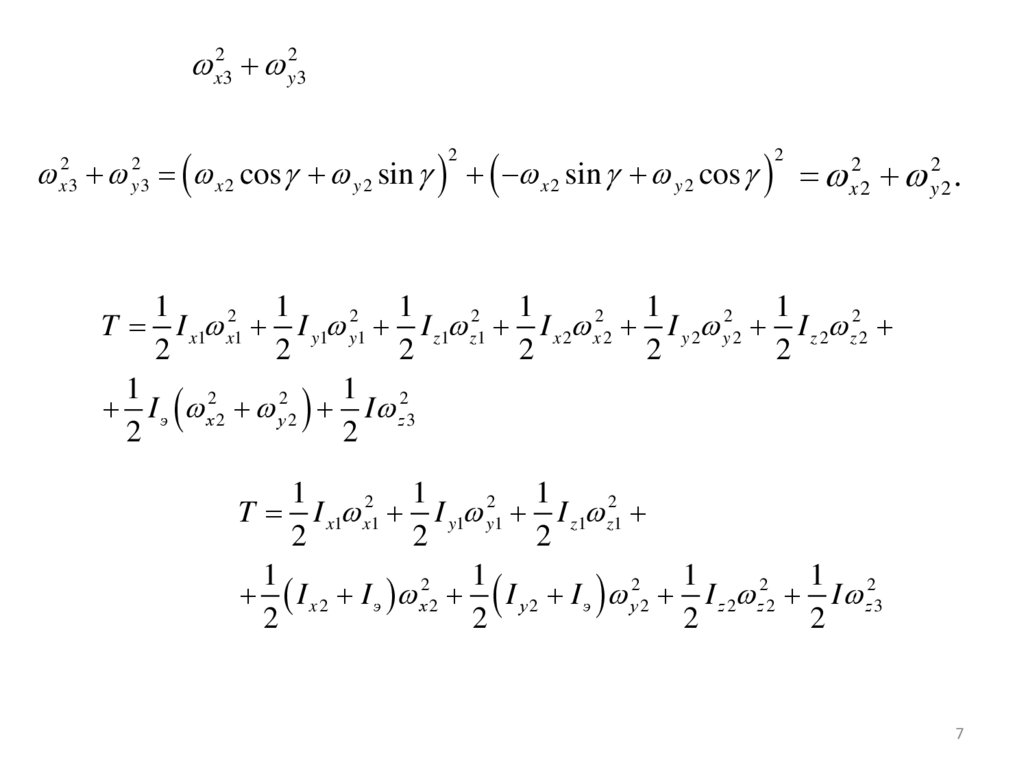
x23 y23x 2 cos y 2 sin x 2 sin y 2 cos x22 y22 .
2
x3
2
2
y3
2
1
1
1
1
1
1
2
2
2
2
2
T I x1 x1 I y1 y1 I z1 z1 I x 2 x 2 I y 2 y 2 I z 2 z22
2
2
2
2
2
2
1
1
I э x22 y22 I z23
2
2
1
1
1
I x1 x21 I y1 y21 I z1 z21
2
2
2
1
1
1
1 2
2
2
2
I x 2 I э x 2 I y 2 I э y 2 I z 2 z 2 I z 3
2
2
2
2
T
7
8.
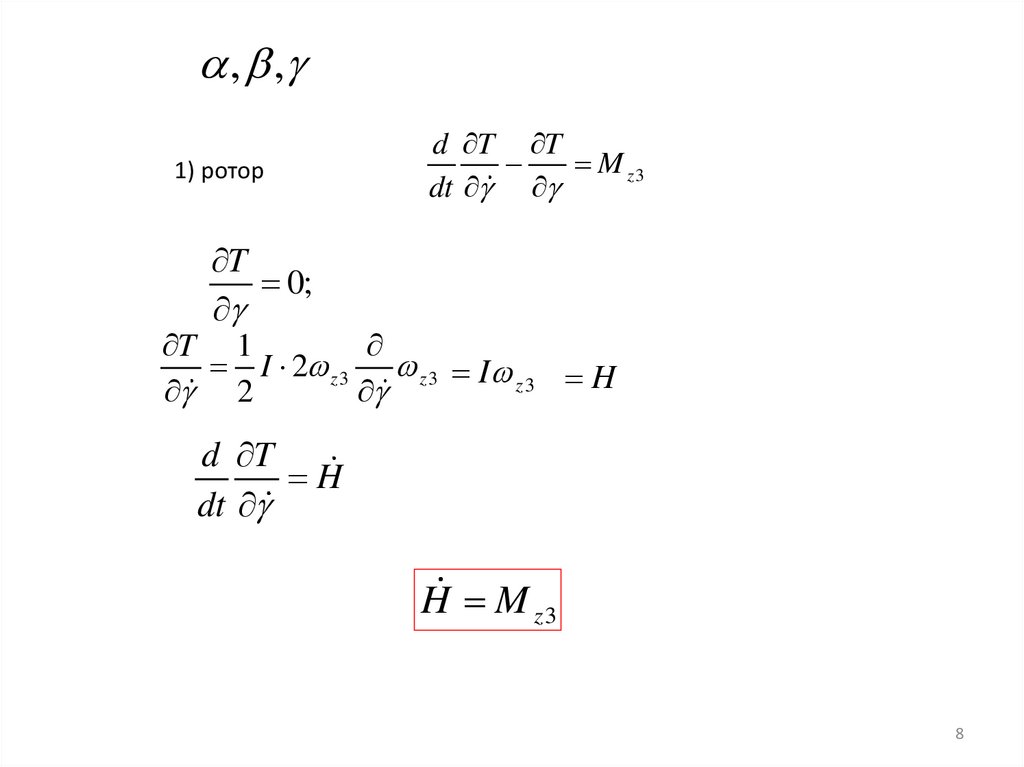
, ,1) ротор
d T T
M z3
dt
T
0;
T 1
I 2 z 3 z 3 I z 3 H
2
d T
H
dt
H M z3
8
9.
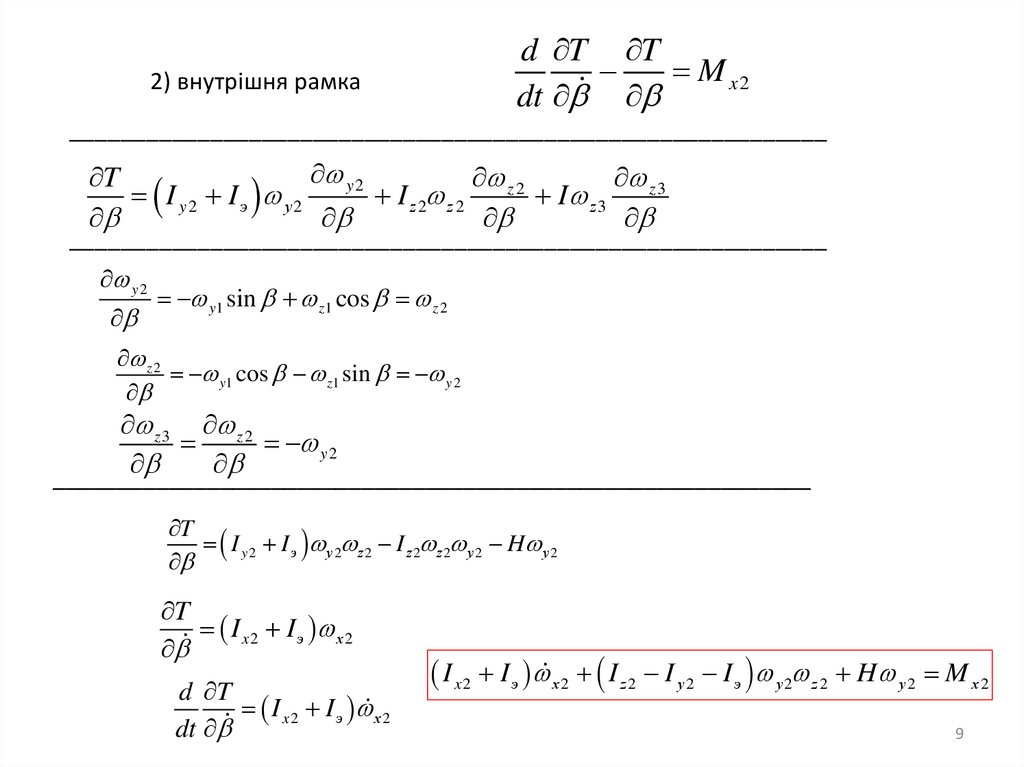
d T TM x2
dt
2) внутрішня рамка
___________________________________________________________
y 2
T
z 2
z 3
I y 2 I э y 2
I z 2 z 2
I z 3
___________________________________________________________
y 2
y1 sin z1 cos z 2
z 2
y1 cos z1 sin y 2
z 3 z 2
y 2
___________________________________________________________
T
I y 2 I э y 2 z 2 I z 2 z 2 y 2 H y 2
T
I x 2 I э x 2
d T
I x 2 I э x 2
dt
I x 2 I э x 2 I z 2 I y 2 I э y 2 z 2 H y 2 M x 2
9
10.
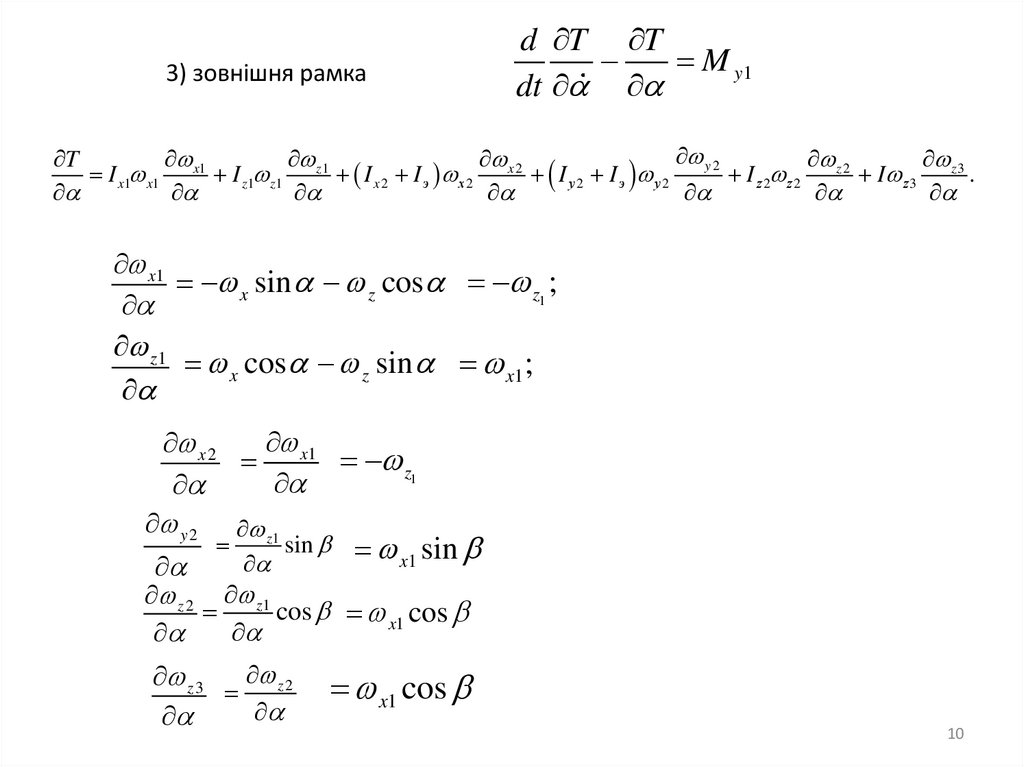
3) зовнішня рамкаd T T
M y1
dt
T
I x1 x1 x1 I z1 z1 z1 I x 2 I э x 2 x 2 I y 2 I э y 2 y 2 I z 2 z 2 z 2 I z 3 z 3 .
x1
x sin z cos z1 ;
z1
x cos z sin x1;
x 2
x1 z1
y 2 z1
sin sin
x1
z 2 z1
cos x1 cos
z 3
z 2 x1 cos
10
11.
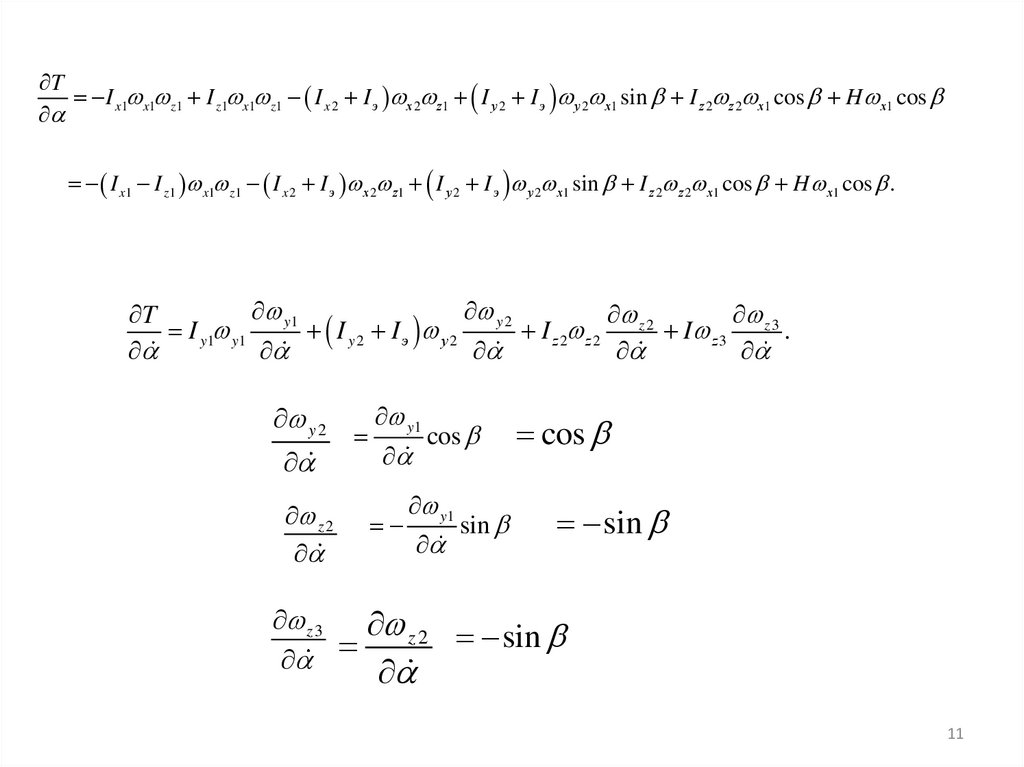
TI x1 x1 z1 I z1 x1 z1 I x 2 I э x 2 z1 I y 2 I э y 2 x1 sin I z 2 z 2 x1 cos H x1 cos
I x1 I z1 x1 z1 I x 2 I э x 2 z1 I y 2 I э y 2 x1 sin I z 2 z 2 x1 cos H x1 cos .
T
I y1 y1 y1 I y 2 I э y 2 y 2 I z 2 z 2 z 2 I z 3 z 3 .
y 2
z 2
z 3
y1
cos
y1
sin
cos
sin
z 2 sin
11
12.
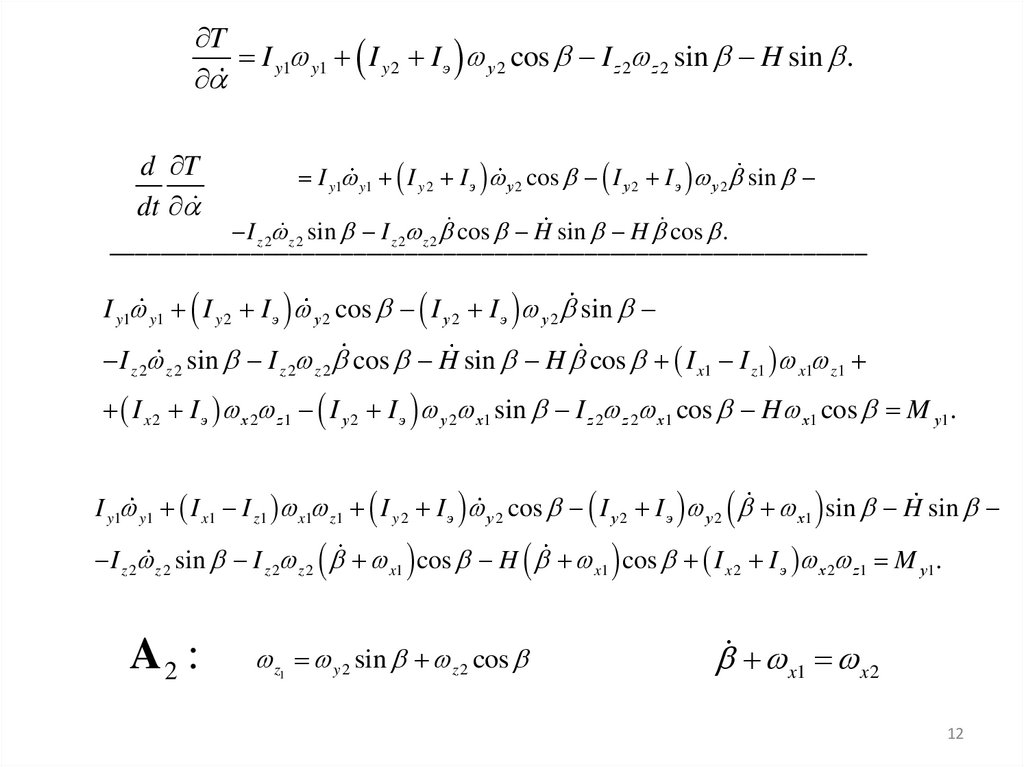
TI y1 y1 I y 2 I э y 2 cos I z 2 z 2 sin H sin .
d T
dt
I y1 y1 I y 2 I э y 2 cos I y 2 I э y 2 sin
I z 2 z 2 sin I z 2 z 2 cos H sin H cos .
___________________________________________________________
I y1 y1 I y 2 I э y 2 cos I y 2 I э y 2 sin
I z 2 z 2 sin I z 2 z 2 cos H sin H cos I x1 I z1 x1 z1
I x 2 I э x 2 z1 I y 2 I э y 2 x1 sin I z 2 z 2 x1 cos H x1 cos M y1.
I y1 y1 I x1 I z1 x1 z1 I y 2 I э y 2 cos I y 2 I э y 2 x1 sin H sin
I z 2 z 2 sin I z 2 z 2 x1 cos H x1 cos I x 2 I э x 2 z1 M y1.
A2 :
z y 2 sin z 2 cos
1
x1 x 2
12
13.
I y1 y1 I x1 I z1 x1 z1 I y 2 I э y 2 cos I y 2 I э y 2 x 2 sin H sinI z 2 z 2 sin I z 2 z 2 x 2 cos H x 2 cos I x 2 I э x 2 y 2 sin z 2 cos M y1.
I y1 y1 I x1 I z1 x1 z1 I y 2 I э y 2 cos I y 2 I э y 2 x 2 sin
I z 2 z 2 sin I z 2 z 2 x 2 cos H x 2 cos H sin
I x 2 I э x 2 y 2 sin I x 2 I э x 2 z 2 cos
I y1 y1 I x1 I z1 x1 z1
I y 2 I э y 2 I x 2 I э I z 2 x 2 z 2 H x 2 cos
I z 2 z 2 I y 2 I x 2 x 2 y 2 H sin M y1.
13
14.
I y1 y1 I x1 I z1 x1 z1 I y 2 I э y 2 I x 2 I э I z 2 x 2 z 2 H x 2 cosI z 2 z 2 I y 2 I x 2 x 2 y 2 H sin M y1;
I x 2 I э x 2 I z 2 I y 2 I э y 2 z 2 H y 2 M x 2
H M z3
14