







 Механика
МеханикаПохожие презентации:

")





. Семинар 7")


Колебания линейных распределенных систем
1.
Тема. Колебания линейных распределенныхсистем
2.
Семинар 11. Изгибные колебания стержня3.
В технической теории изгибные колебания стержня описываютуравнением при p = 0
д2
д2 w д
дw
EJ 2 F
0 (10.1)
2
дx
дx дt
дt
Если стержень имеет постоянные по длине характеристики EJ = const,
рF = const, то уравнение для исследования собственных колебаний будет
следующим:
д 4 w F д 2 w
0 (10.2)
4
2
дx
EJ дt
Функция w(x, t) на концах стержня должна удовлетворять краевым
условиям, соответствующим характеру закрепления концов стержня.
4.
Основные типы краевых условий для изгибных колебаний стержней1. w 0,
дw
0
дx
д2w
2. w 0, EJ 2 0
дx
д
д2 w
д2w
3. EJ 2 0, EJ 2 0
дx
дx
дx
д
д2w
д2 w
4. EJ 2 c1w 0, EJ 2 0
дx
дx
дx
д2w
дw
5. w 0, EJ 2 c2
0
дx
дx
5.
6.
7.
Пример 1. Определить собственную частоты и формы изгибныхколебаний стержня
EJ
c
L
д 4 w F д 2 w
0 (10.2)
4
2
дx
EJ дt
Начальные условия для определения собственных частот всегда нулевые
Решение уравнения имеет вид
w ( x, t ) W ( x) sin t
( 10.3)
Подстановка (10.3) в (10.2) приводит к уравнению
W IV 4W 0 (10.3)
Граничные условия при
x =0 и x = L для W(x)
W (0) 0; W (0) 0; W ( L) 0;
W ( L)
c
W ( L); (10.13)
EJ
8.
W (0) 0; W (0) 0; W ( L) 0;W ( L)
c
W ( L)
EJ
(10.13)
Общее решение в виде
W (0)
W (0)
W (0)
W ( x) W (0) S1 ( x )
S 2 ( x)
S3 ( x)
S 4 ( x)
2
3
Два первых условия (10.13) дают
W ( x ) C3 S 3 ( x ) C 4 S 4 ( x )
(10.14)
Производные
W ( x) C3 2 S1 ( x) C4 2 S 2 ( x);
W ( x) C3 3 S 4 ( x) C4 3 S1 ( x)
Подстановка (10.14) в последние два условия (10.13)
C3 S1 ( L) C4 S 2 ( L) 0 (10.15)
c
c
3
C3 [ S 4 ( L )
S3 ( L)] C4 [ S1 ( L)
S 4 ( L)] 0
EJ
EJ
3
(10.10)
9.
2C3 S1 ( L) C4 S 2 ( L) 0 (10.15)
c
c
3
C3 [ S 4 ( L )
S3 ( L)] C4 [ S1 ( x)
S 4 ( L)] 0
EJ
EJ
3
Условием ненулевого решения является равенство нулю определителя
S1 ( L)
S 2 ( L)
0 (10.16)
c
c
S 4 ( L)
S ( L) S1 ( L)
S ( L)
3 3
3 4
EJ
EJ
или
c
[ S1 ( L) S 4 ( L) S 2 ( L) S 3 ( L)] 0 (10.17)
3
EJ
3
S12 ( ) S 2 ( ) S 4 ( ) 03 [ S1 ( ) S 4 ( ) S 2 ( ) S3 ( )] 0 (10.17 a )
S12 ( L) S 2 ( L) S 4 ( L)
3
cL
где L; 03
EJ
(10.18)
10.
Используя выражения для функций Крылова (10.9), получим следующееуравнение частот:
03
1 ch cos 3 [ sh cos ch sin ] 0 (10.19)
На рис. 2. показана зависимость первых двух корней уравнения (10.19) от 0
11.
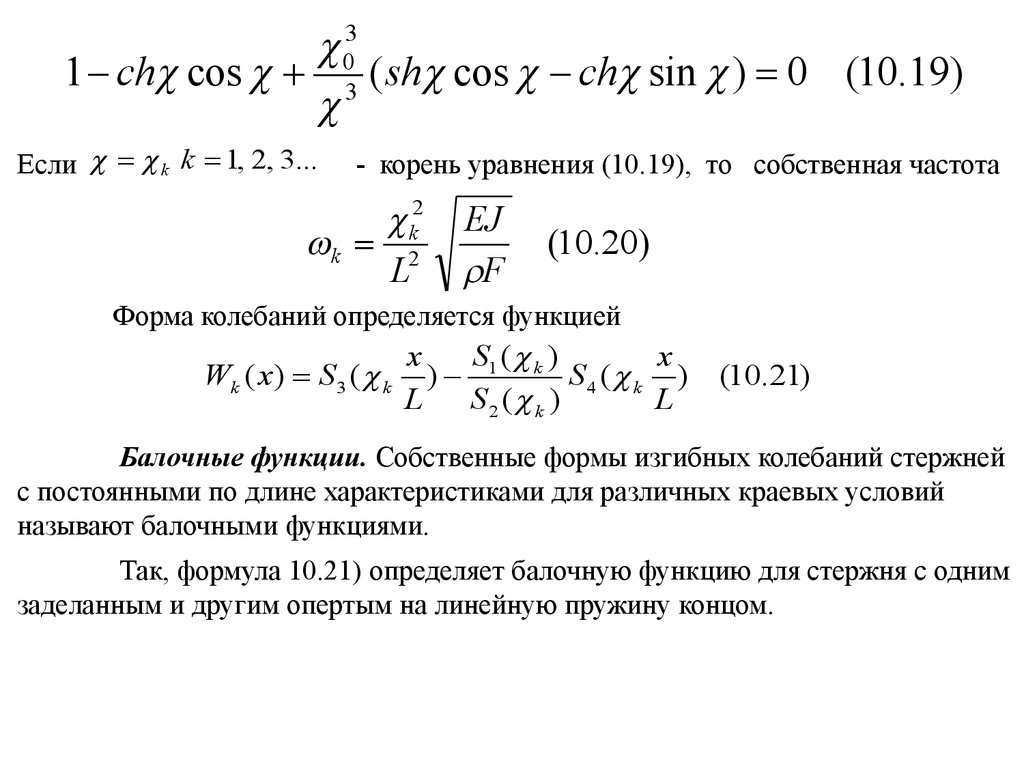
031 ch cos 3 ( sh cos ch sin ) 0 (10.19)
Если k k 1, 2, 3...
- корень уравнения (10.19), то собственная частота
k2
k 2
L
EJ
F
(10.20)
Форма колебаний определяется функцией
Wk ( x ) S 3 ( k
S ( )
x
x
) 1 k S4 ( k )
L
S2 ( k )
L
(10.21)
Балочные функции. Собственные формы изгибных колебаний стержней
с постоянными по длине характеристиками для различных краевых условий
называют балочными функциями.
Так, формула 10.21) определяет балочную функцию для стержня с одним
заделанным и другим опертым на линейную пружину концом.