

























 Физика
ФизикаПохожие презентации:



")





")
Кинематика. Операции с векторами
1.
ФИЗИКА ч. IМЕХАНИКА
2.
Физика изучает наиболее общие законыформирования
и развития окружающей нас материи в ее
наиболее примитивных формах,
которые принято называть неживой
природой.
Поэтому можно утверждать, что физика
является фундаментом всех естественных
наук.
3.
4.
“Пусть будет стыдно тому, кто бездумно пользуетсячудесами науки и техники, смысля в них не более
того, что смыслит в ботанике корова, с
удовольствием щиплющая траву.”
(А. Эйнштейн, 1903 г.)
5.
МАТЕМАТИЧЕСКОЕВВЕДЕНИЕ
Операции с векторами
6.
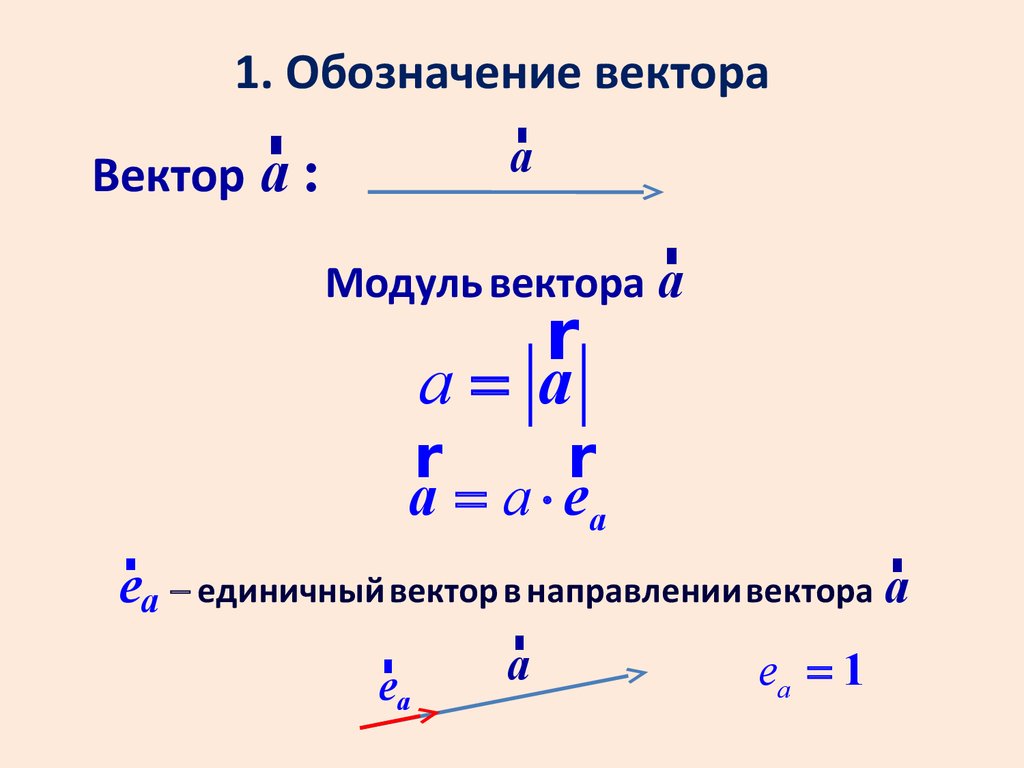
1. Обозначение вектораr
a
r
Вектор a :
r
Модуль вектора a
r
a= a
r
r
a = a × ea
r
r
ea - единичный вектор в направлении вектора a
r
ea
r
a
ea = 1
7.
Ортыосей
координатных
r r r
Единичные векторы i , j и k ,
проведенные в направлении координатных осей,
называют ортами этих осей.
Такая тройка векторов полностью определяет
систему координат, поэтому ее называют
базисом координатной системы.
8.
Другие единичные векторыr
n - единичный вектор нормали
r
n
r
t - единичный касательный вектор
r
t
9.
2. Проекция вектораa
x1
ах
x2
ax = x2 - x1
ax = a cos a
х
10.
3. Сложение векторовr r r
с =a+b
a) правило параллелограмма
б) правило треугольника
и многоугольника
11.
4. Умножение вектора на числоr
a
r
b ( m > 0)
r
b ( m < 0)
По модулю
b= ma
r
r
b = ma
12.
5. Разложение вектора через проекцииy
ay
r
j
z
r
r i
k
r
a
ax
х
r
r
r
r
a = a x i + a y j + az k
13.
6. Скалярное произведение векторовОбозначается
r r
c = (a , b )
или
r r
с = a ×b
Раскрывается
c = abcosa
r r
a - угол между а и b
r
а
a
r
b
14.
Примерыc = abcos0 = ab
c = abcosp = - ab
p
c = abcos = 0
2
c = abb = aba
r r
r r
(a , b ) = (b , a )
r r
2
(a , a ) = a
15.
7. Векторное произведение векторовОбозначается
r
r r
c = éë a , b ùû
или
r r r
с = a´b
Раскрывается
r
r
c = absina × n
r
n - единичный вектор нормали
r r
к плоскости, в которой лежат а и b
По модулю
c = ab sina
16.
rВектор c направлен по нормали к r
r
плоскости, в которой лежат векторы a и b.
Он перпендикулярен обоим
векторам-сомножителям.
r r r r
с ^a ис ^b
17.
rc находят по
Направление вектора
правилу правого винта.
r
c
r
b
r
n
a
r
a
r
Если смотреть
вслед вектору c ,
r
r
то поворот от а к b осуществляется по часовой стрелке.
r r r
a, b и c образуют правую тройку векторов
18.
Примерыc = absin0 = 0
c = absinp = 0
p
c = absin = ab
2
r r
r r
éa , b ù = - éb , a ù
ë
û
ë
û
r r
[ a, a] = 0
19.
8. Производная вектораr
r
r
dea
da d ( a × ea ) da r
=
=
× ea + a ×
dt
dt
dt
dt
Показывает, как изменяется
модуль вектора.
Показывает, как изменяется
направление вектора.
20.
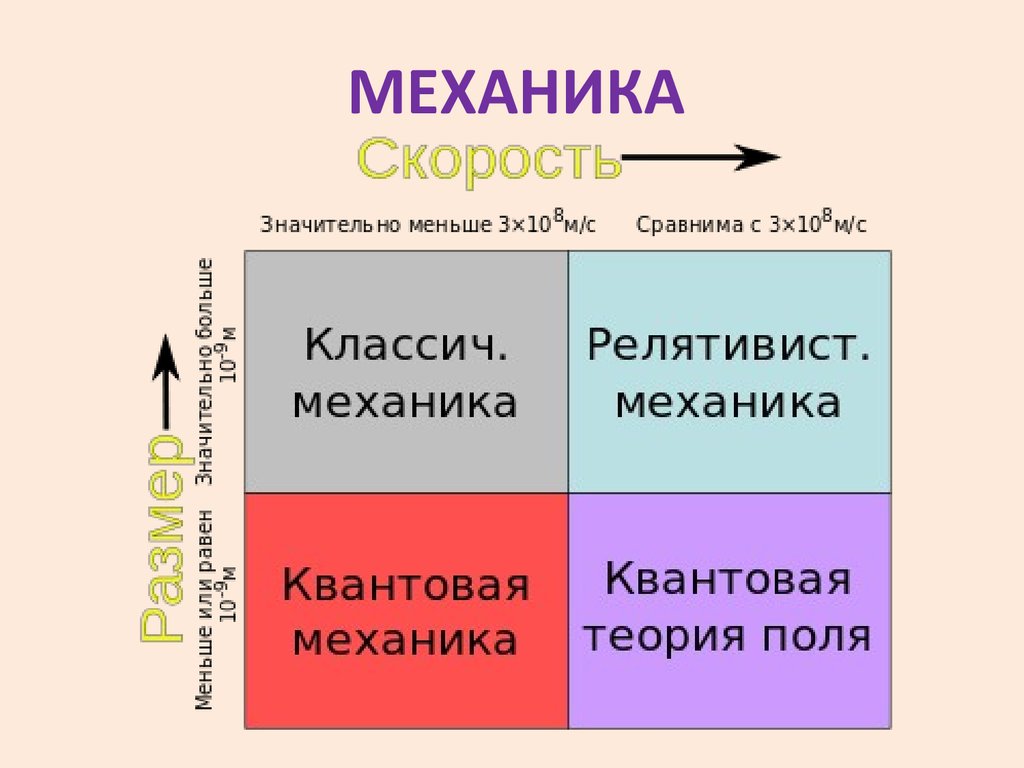
МЕХАНИКА21.
Механика изучает движение тел.Механическое движение –
изменение положения тела
относительно других тел.
Для описания движения
необходима система отсчёта: тело
отсчёта, система координат, часы.
21
22.
За тело отсчета принимают такое тело,которое в данной задаче можно условно
считать неподвижным.
Тело отсчета
23.
Основная задача механики– зная положение и скоростьтела в начальный момент
времени, определить положение
и скорость тела в произвольный
момент времени.
24.
Реальные физическиеявления очень сложны и, как
правило, возможно лишь
приближенное их описание.
Для этого пользуются
упрощающими моделями.
25.
Материальная точка –– тело, размерами и формой
которого в данной задаче можно
пренебречь.
(Массой – нельзя!)
Абсолютно твердое тело –
– такое тело, деформацией которого
можно пренебречь.
26.
ВИДЫ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛАПоступательное движение – все точки тела
движутся одинаково. Любая прямая, связанная
с телом, параллельна самой себе.
Достаточно описать движение одной точки.
Вращательное движение – точки тела движутся
по окружностям, центры которых лежат на
неподвижной прямой, называемой осью
вращения.
27.
Кинематика материальной точкиТраектория – линия, по которой
движется материальная точка.
Положение точки на траектории можно
задать либо с помощью координат х,r y,
z, либо с помощью радиус–вектора r .
28.
Радиус-вектор – это вектор, проведенный изначала координат в данную точку траектории.
y
ае
тр
0
ия
ор
кт
r
r
x
29.
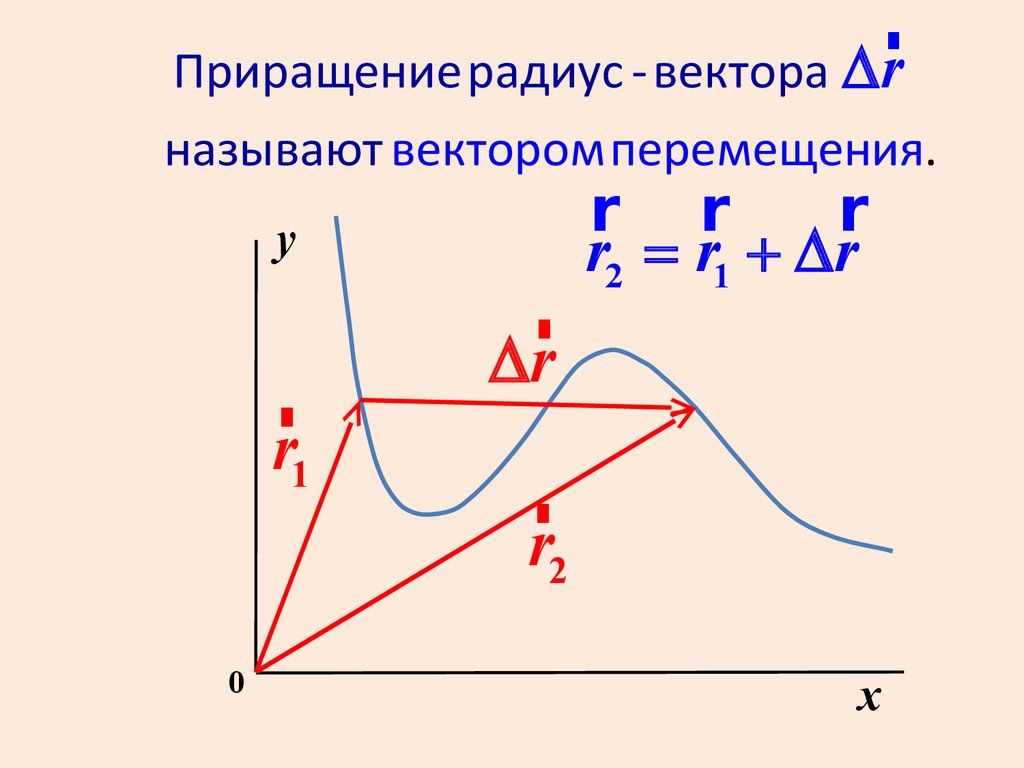
rПриращение радиус - вектора Dr
называют вектором перемещения.
y
r
r1
0
r
Dr
r r
r
r2 = r1 + Dr
r
r2
x
30.
Длина участка траектории междудвумя положениями МТ - это путь Ds.
y
r
r1
0
r
Dr
Ds
[ Dsм] = [ ]
r
r2
x
31.
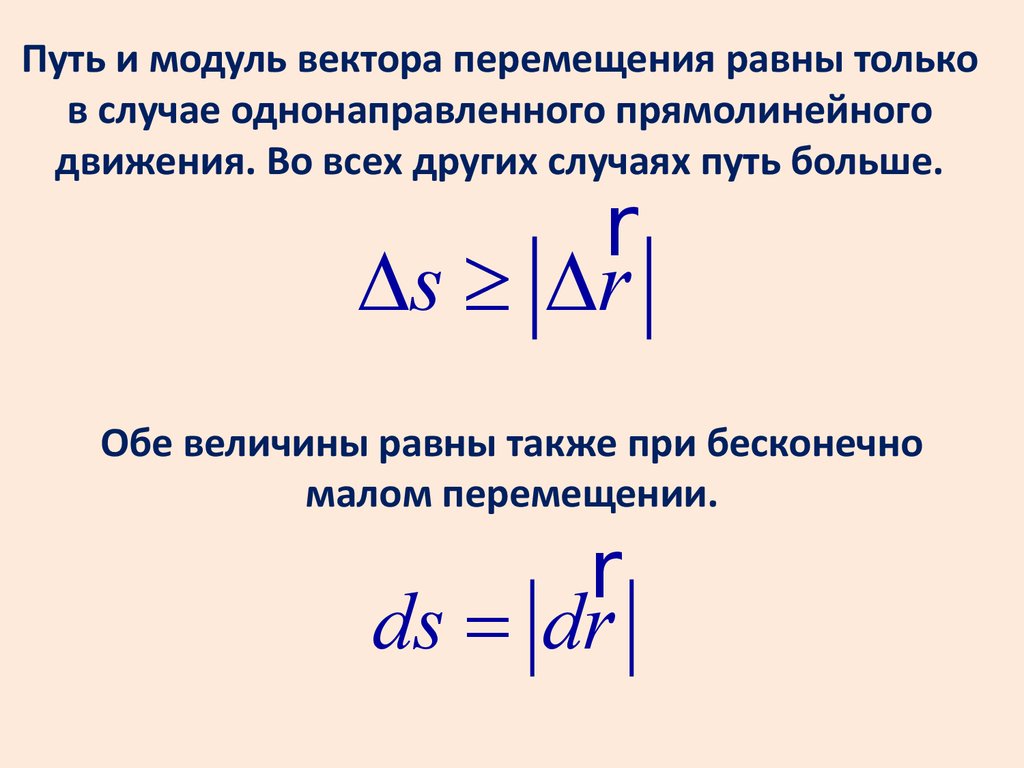
Путь и модуль вектора перемещения равны тольков случае однонаправленного прямолинейного
движения. Во всех других случаях путь больше.
r
Ds ³ Dr
Обе величины равны также при бесконечно
малом перемещении.
r
ds = dr
32.
СКОРОСТЬСкорость – это величина,
характеризующая быстроту
изменения радиус-вектора
материальной точки со временем.
33.
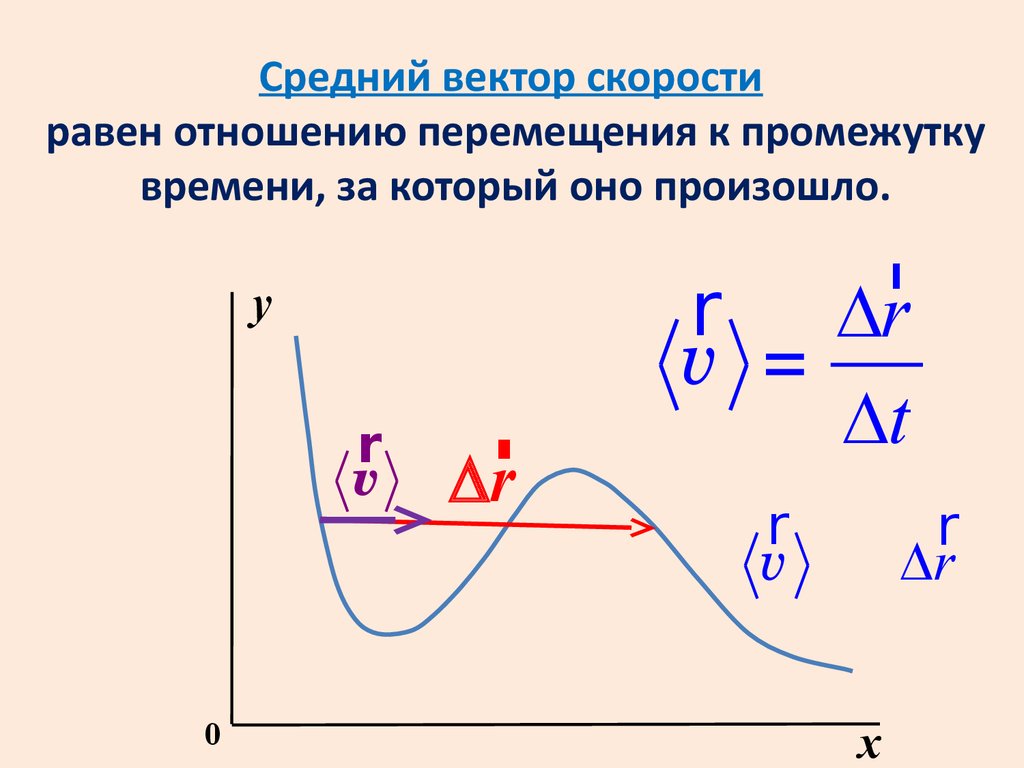
Средний вектор скоростиравен отношению перемещения к промежутку
времени, за который оно произошло.
y
r
v
0
r
Dr
r
r Dr
v =
Dt
r
r
v Dr
x
34.
Средняя путевая скорость(средний модуль скорости) равна
отношению пути к промежутку времени,
за который этот путь пройден.
Ds
v =
Dt
35.
Если траектория замкнута, тоr
r
Dr = 0 и v = 0,
а Ds ¹ 0 и v ¹ 0.
36.
Мгновенная скорость – это скорость вданный момент времени. Ее находят
как предел средней скорости при
Dt 0.
r
r
r
Δr
v = lim v = lim
Dt 0
Dt 0 Δt
r
r d r r&
v=
=r
dt
37.
Мгновенная скорость равна производнойрадиус-вектора по времени.
y
r
t
r
v
r
v
r
r
v = v ×t
x
Вектор мгновенной скорости направлен
по касательной к траектории.
38.
Модуль мгновенной скоростинаходят как производную пути по времени.
r
r dr
v= v =
dt
r
dr = ds
ds
v = = s&
dt
é мù
[ v] = ê ú
ëсû
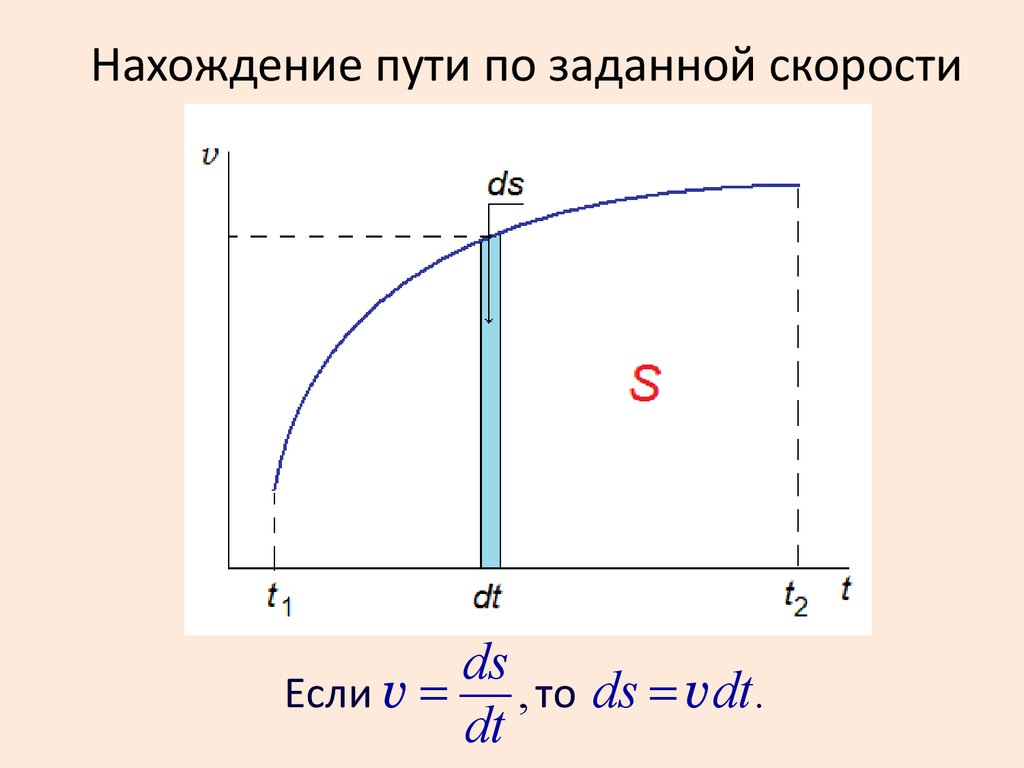
39.
Нахождение пути по заданной скоростиds
Если v =
, то ds = vdt.
dt
40.
Путь, пройденный за время от t1 до t2:t2
Ds = ò vdt
t1
На графике это площадь под кривой v(t).
В случае v=const.:
t2
Ds = v ò dt = v(t2 - t1 )
t1