









 Физика
ФизикаПохожие презентации:
")









Колебания. (Раздел 2. Тема 7)
1. Раздел 2: Колебания и волны
Тема7. Колебания2. Тема 7. Колебания
1. Гармонические колебания.2. Характеристики колебаний.
3. Представление колебаний в векторной и
комплексной формах.
4. Сложение колебаний.
3. 1 учебный вопрос: Гармонические колебания.
Колебательным называется такое движение, прикотором тело многократно проходит через одно и
то же устойчивое положение равновесия. При этом
под устойчивым понимается такое положение, в
котором тело может находиться бесконечно долго.
4.
Виды колебаний:Рис. Представление колебаний: а – сложной формы, б –
прямоугольные, в – пилообразные,
г – гармонические, д – затухающие, е – нарастающие
периодические (изменяющиеся
величины повторяются через
равные промежутки времени);
непериодические.
В зависимости от характера
действующих сил различают
колебания:
свободные (собственные),
вынужденные,
автоколебания,
параметрические.
5.
Гармоническими называются колебания, прикоторых изменение величин происходит по закону
синуса или косинуса.
x A cos( t )
A амплитуда
- циклическая частота
- начальная фаза
(1)
6.
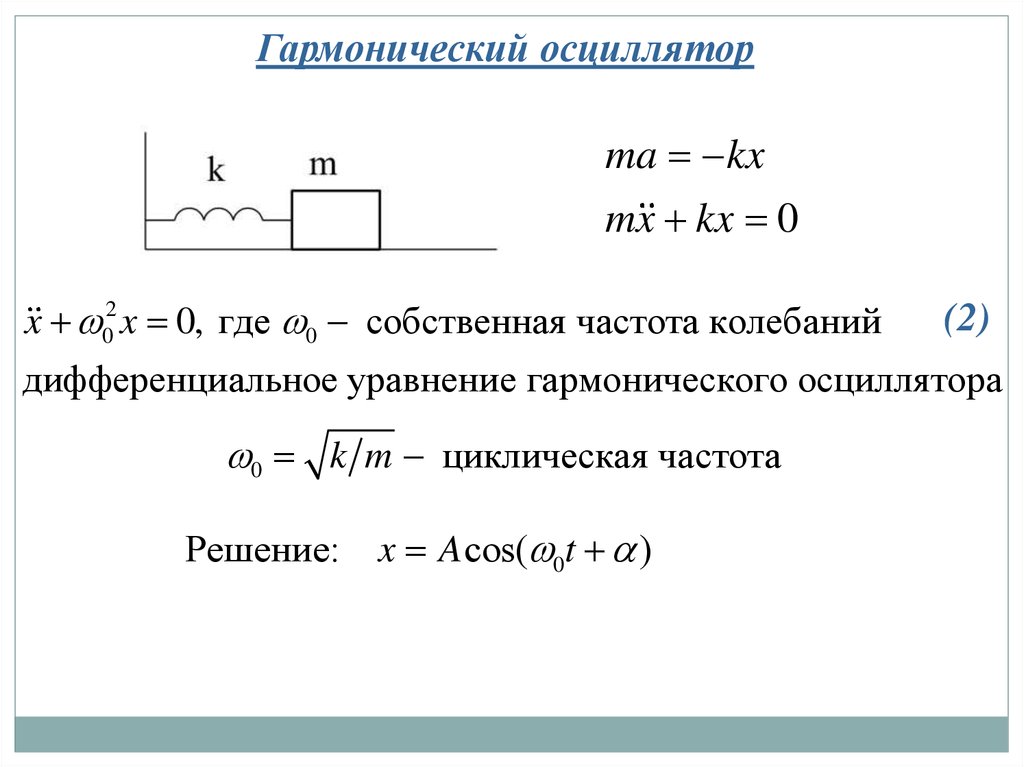
Гармонический осцилляторma kx
mx kx 0
x 02 x 0, где 0 собственная частота колебаний
(2)
дифференциальное уравнение гармонического осциллятора
0 k m циклическая частота
Решение:
x A cos( 0t )
7. 2 учебный вопрос: Характеристики колебаний
Кинематические характеристики: смещение,амплитуда, фаза, частота, период, скорость,
ускорение.
Динамические характеристики: сила, энергия.
x = A cos (ω0t + 0)
1. Смещение x отклонение
системы от положения равновесия.
2. Амплитуда А = xmax максимальное
отклонение системы от положения равновесия.
8.
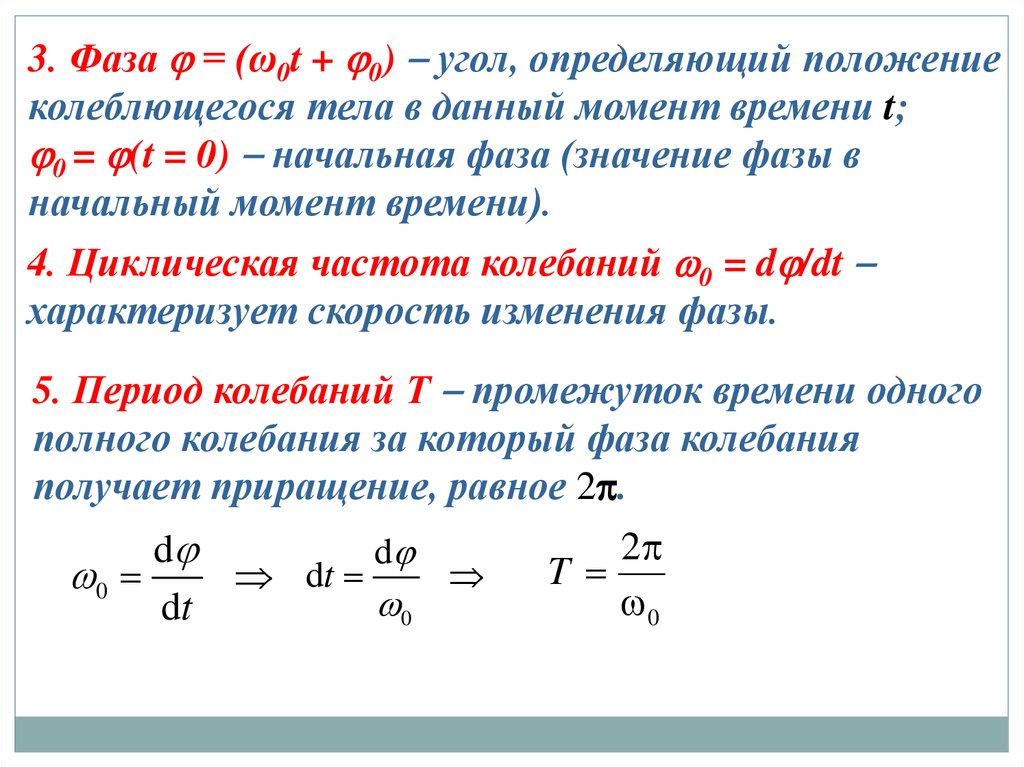
3. Фаза = (ω0t + 0) угол, определяющий положениеколеблющегося тела в данный момент времени t;
0 = (t = 0) начальная фаза (значение фазы в
начальный момент времени).
4. Циклическая частота колебаний 0 = d /dt
характеризует скорость изменения фазы.
5. Период колебаний Т промежуток времени одного
полного колебания за который фаза колебания
получает приращение, равное 2 .
d
d
0
dt
0
dt
2
T
0
9.
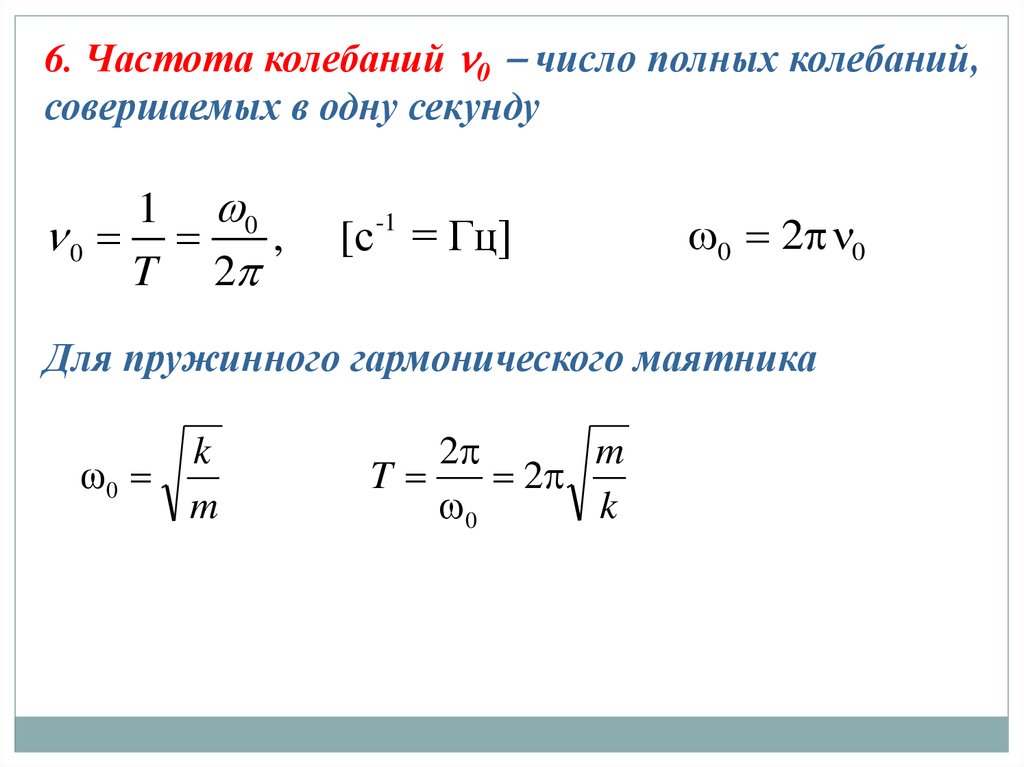
6. Частота колебаний 0 число полных колебаний,совершаемых в одну секунду
1 0
0
,
T 2
[с = Гц]
-1
0 2 0
Для пружинного гармонического маятника
k
ω0
m
2
m
T
2
0
k
10.
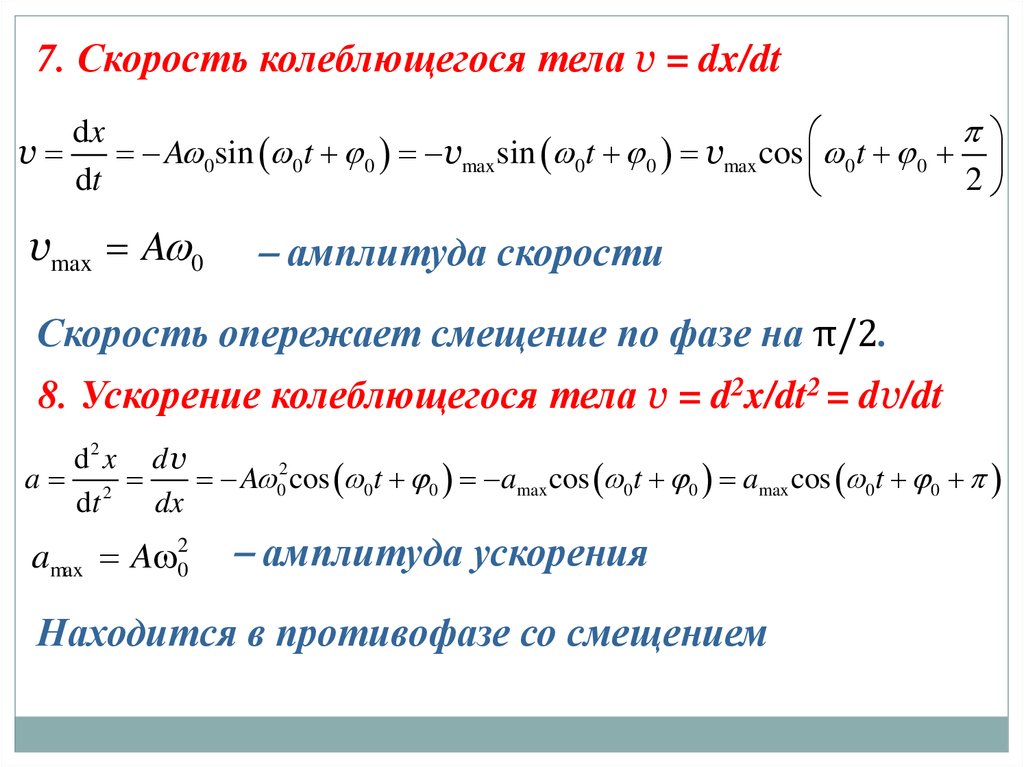
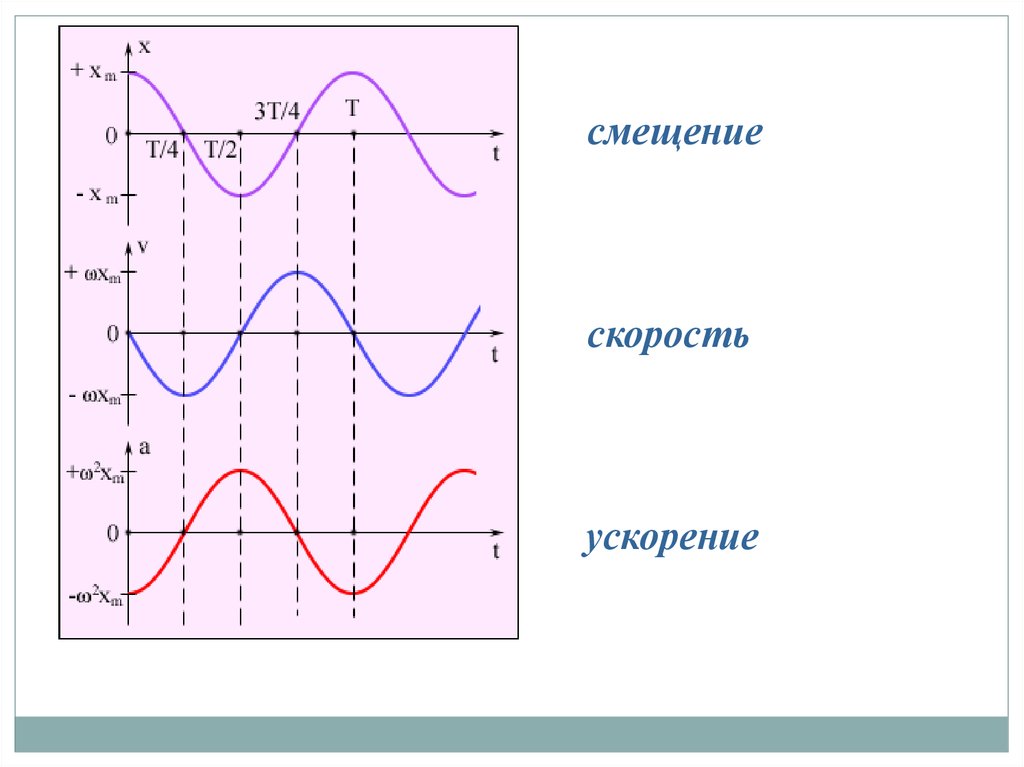
7. Скорость колеблющегося тела v = dx/dtv
dx
A 0sin 0t 0 vmax sin 0t 0 vmax cos 0t 0
dt
2
vmax A 0
амплитуда скорости
Скорость опережает смещение по фазе на π/2.
8. Ускорение колеблющегося тела v = d2x/dt2 = dv/dt
d2 x d v
a 2
A 02 cos 0t 0 amax cos 0t 0 amax cos 0t 0
dt
dx
amax A 02
амплитуда ускорения
Находится в противофазе со смещением
11.
смещениескорость
ускорение
12.
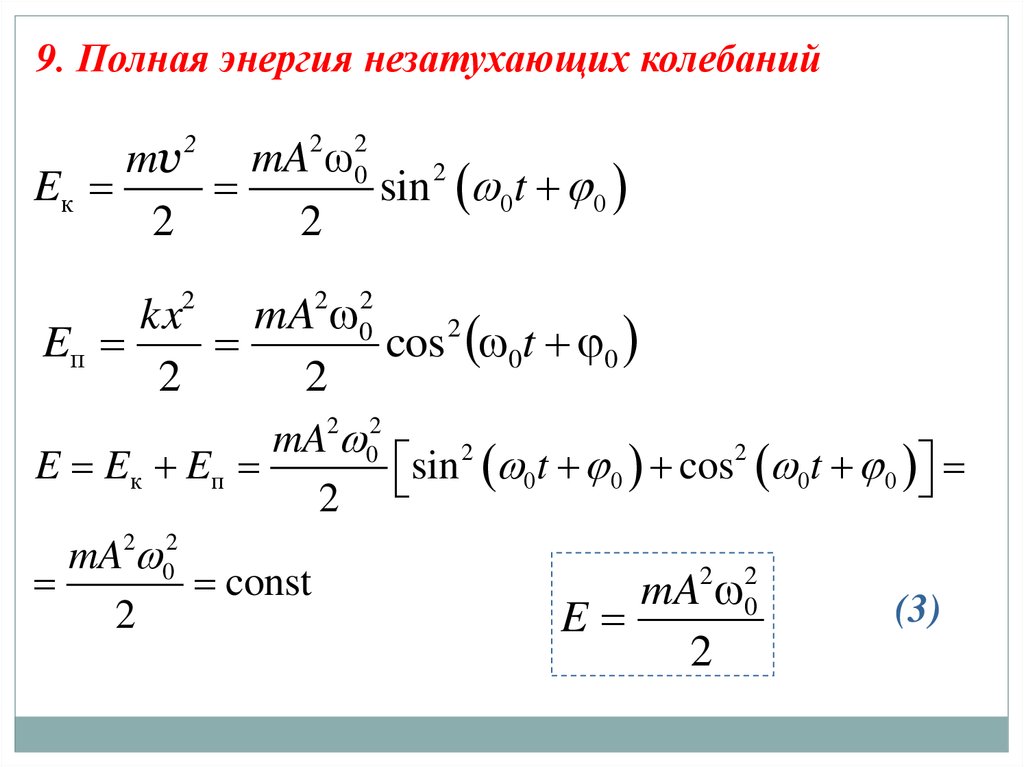
9. Полная энергия незатухающих колебанийmA ω
mv
2
Eк
sin 0t 0
2
2
2
2
2
0
kx2 mA2 02
Eп
cos 2 0t 0
2
2
mA2 02
2
2
E Eк Eп
sin 0t 0 cos 0t 0
2
mA2 02
const
2
mA
E
2
2
2
0
(3)
13.
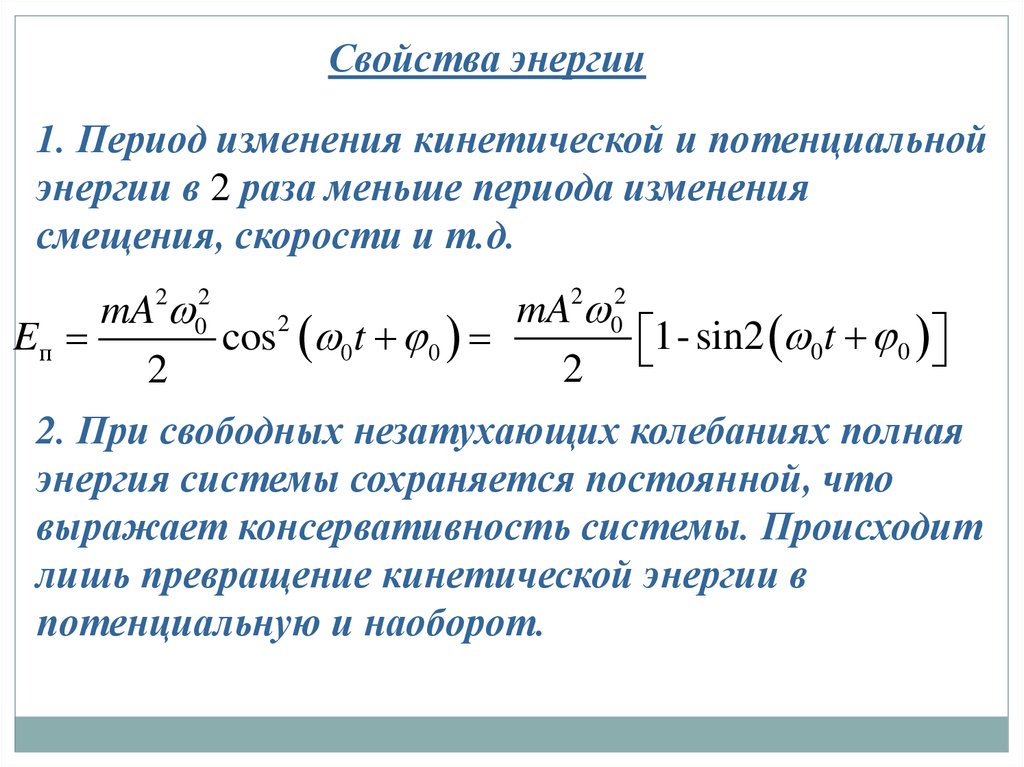
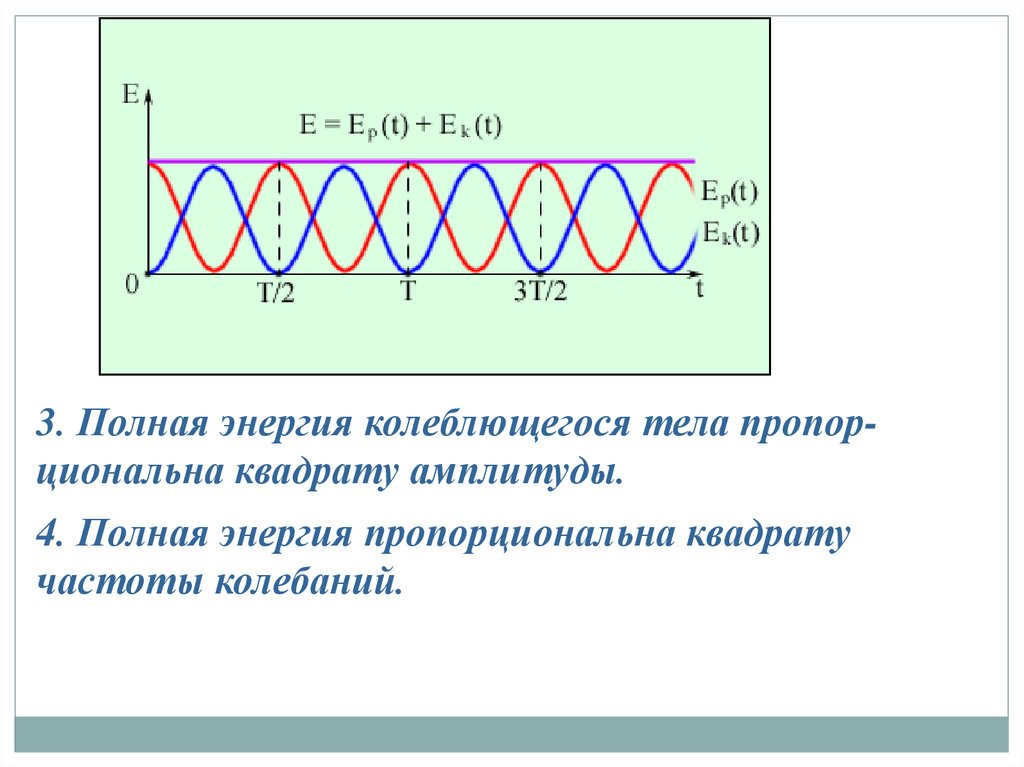
Свойства энергии1. Период изменения кинетической и потенциальной
энергии в 2 раза меньше периода изменения
смещения, скорости и т.д.
2 2
mA
0
mA2 02
2
1- sin2 0t 0
Eп
cos 0t 0
2
2
2. При свободных незатухающих колебаниях полная
энергия системы сохраняется постоянной, что
выражает консервативность системы. Происходит
лишь превращение кинетической энергии в
потенциальную и наоборот.
14.
3. Полная энергия колеблющегося тела пропорциональна квадрату амплитуды.4. Полная энергия пропорциональна квадрату
частоты колебаний.
15. 3 учебный вопрос: Представление колебаний в векторной и комплексной формах
Векторная диаграмма изображаетколебания графически с помощью
векторов, вращающихся с угловой
скоростью 0, равной собственной
частоте колебания.
x A cos( 0t )
- фазы
16.
Комплексным числом называетсявыражение вида
z x i y
где х и у – действительные числа,
i – мнимая единица:
i 1
2
Число х называется действительной
частью числа z:
х=Re(z)
Число у называется мнимой
частью числа z:
у=Im(z)
17.
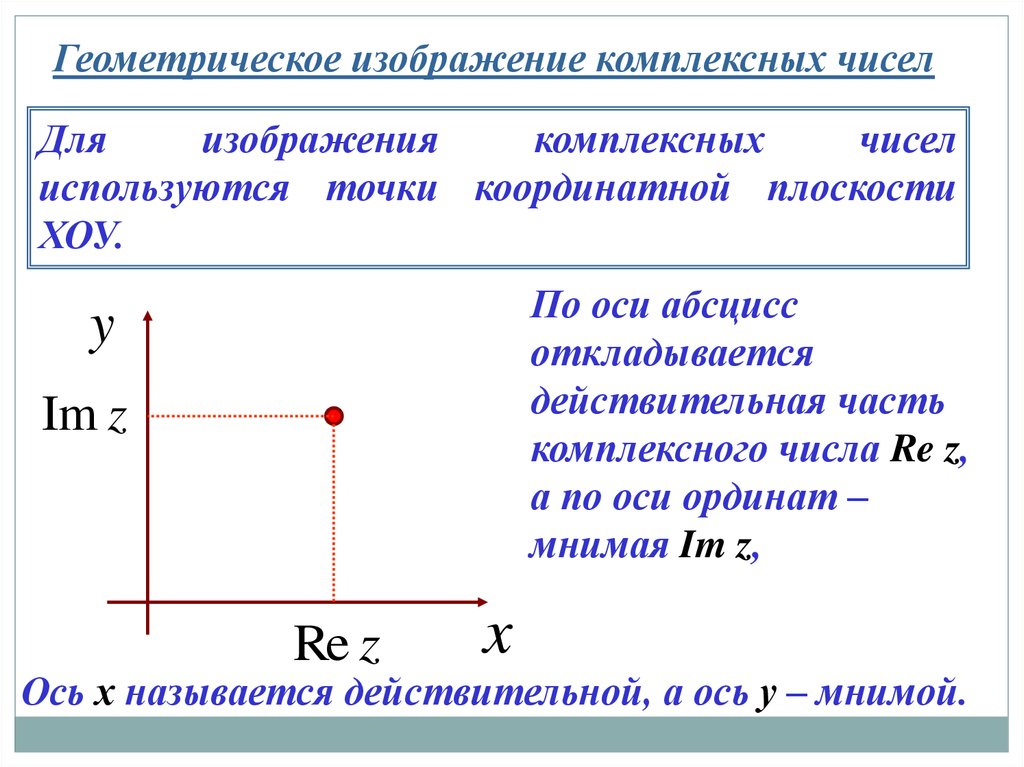
Геометрическое изображение комплексных чиселДля
изображения
комплексных
чисел
используются точки координатной плоскости
ХОУ.
По оси абсцисс
откладывается
действительная часть
комплексного числа Re z,
а по оси ординат –
мнимая Im z,
y
Im z
Re z
x
Ось х называется действительной, а ось у – мнимой.
18.
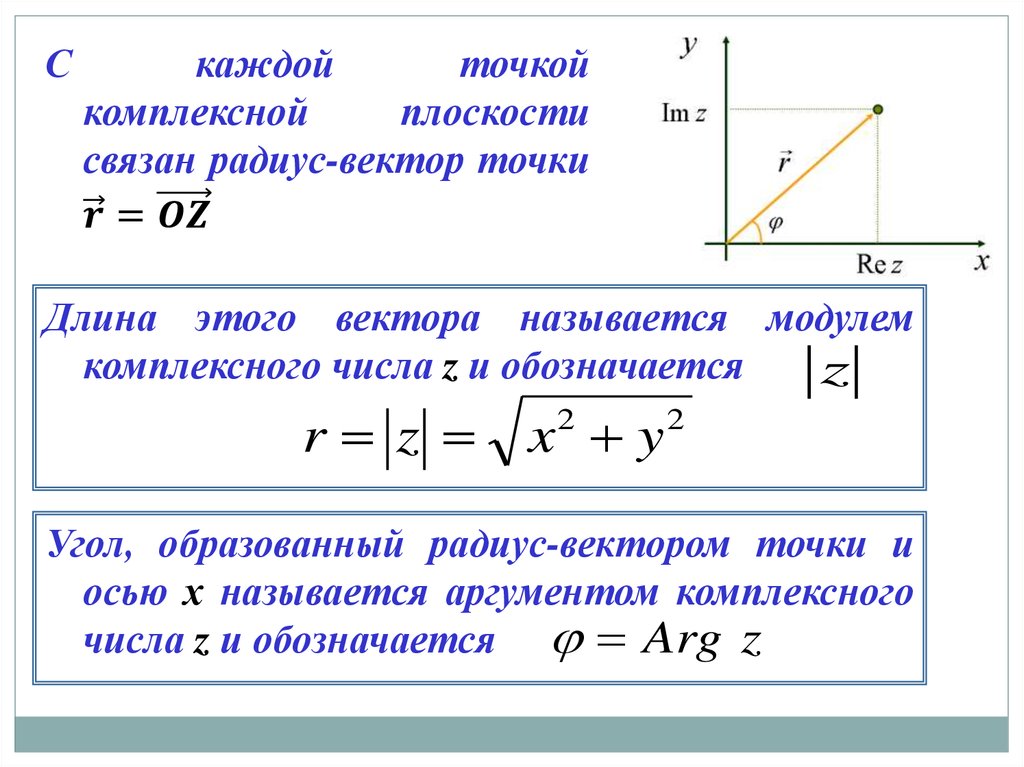
Скаждой
точкой
комплексной
плоскости
связан радиус-вектор точки